

Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
5. Datenstrukturen zur teilautonomen Umgebungserfassung<br />
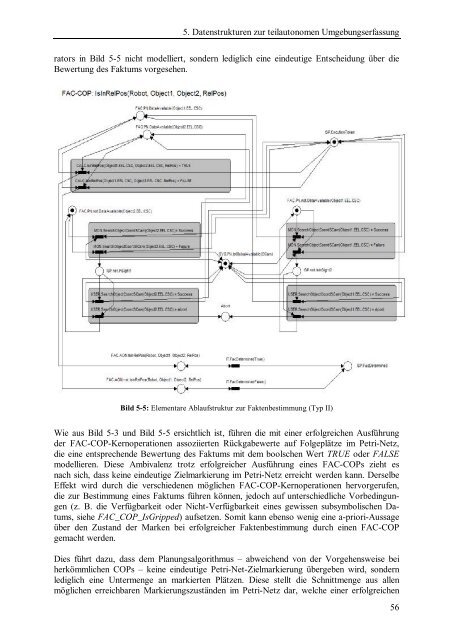
rators in Bild 5-5 nicht modelliert, sondern lediglich eine eindeutige Entscheidung über die<br />
Bewertung des Faktums vorgesehen.<br />
Bild 5-5: Elementare Ablaufstruktur zur Faktenbestimmung (Typ II)<br />
Wie aus Bild 5-3 und Bild 5-5 ersichtlich ist, führen die mit einer erfolgreichen Ausführung<br />
der FAC-COP-Kernoperationen assoziierten Rückgabewerte auf Folgeplätze im Petri-Netz,<br />
die eine entsprechende Bewertung des Faktums mit dem boolschen Wert TRUE oder FALSE<br />
modellieren. Diese Ambivalenz trotz erfolgreicher Ausführung eines FAC-COPs zieht es<br />
nach sich, dass keine eindeutige Zielmarkierung im Petri-Netz erreicht werden kann. Derselbe<br />
Effekt wird durch die verschiedenen möglichen FAC-COP-Kernoperationen hervorgerufen,<br />
die zur Bestimmung eines Faktums führen können, jedoch auf unterschiedliche Vorbedingungen<br />
(z. B. die Verfügbarkeit oder Nicht-Verfügbarkeit eines gewissen subsymbolischen Datums,<br />
siehe FAC_COP_IsGripped) aufsetzen. Somit kann ebenso wenig eine a-priori-Aussage<br />
über den Zustand der Marken bei erfolgreicher Faktenbestimmung durch einen FAC-COP<br />
gemacht werden.<br />
Dies führt dazu, dass dem Planungsalgorithmus – abweichend von der Vorgehensweise bei<br />
herkömmlichen COPs – keine eindeutige Petri-Net-Zielmarkierung übergeben wird, sondern<br />
lediglich eine Untermenge an markierten Plätzen. Diese stellt die Schnittmenge aus allen<br />
möglichen erreichbaren Markierungszuständen im Petri-Netz dar, welche einer erfolgreichen<br />
56
