

Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
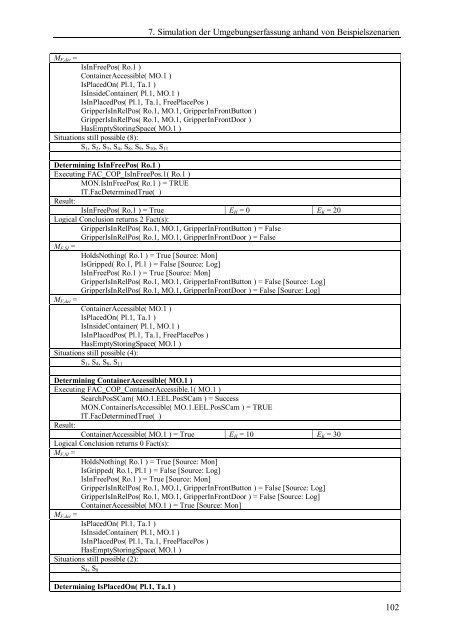
7. Simulation der Umgebungserfassung anhand von Beispielszenarien<br />
M F,det =<br />
IsInFreePos( Ro.1 )<br />
ContainerAccessible( MO.1 )<br />
IsPlacedOn( Pl.1, Ta.1 )<br />
IsInsideContainer( Pl.1, MO.1 )<br />
IsInPlacedPos( Pl.1, Ta.1, FreePlacePos )<br />
GripperIsInRelPos( Ro.1, MO.1, GripperInFrontButton )<br />
GripperIsInRelPos( Ro.1, MO.1, GripperInFrontDoor )<br />
HasEmptyStoringSpace( MO.1 )<br />
Situations still possible (8):<br />
S 1 , S 2 , S 3 , S 4 , S 8 , S 9 , S 10 , S 11<br />
Determining IsInFreePos( Ro.1 )<br />
Executing FAC_COP_IsInFreePos.1( Ro.1 )<br />
MON.IsInFreePos( Ro.1 ) = TRUE<br />
IT.FacDeterminedTrue( )<br />
Result:<br />
IsInFreePos( Ro.1 ) = True E H = 0 E K = 20<br />
Logical Conclusion returns 2 Fact(s):<br />
GripperIsInRelPos( Ro.1, MO.1, GripperInFrontButton ) = False<br />
GripperIsInRelPos( Ro.1, MO.1, GripperInFrontDoor ) = False<br />
M F,SI =<br />
HoldsNothing( Ro.1 ) = True [Source: Mon]<br />
IsGripped( Ro.1, Pl.1 ) = False [Source: Log]<br />
IsInFreePos( Ro.1 ) = True [Source: Mon]<br />
GripperIsInRelPos( Ro.1, MO.1, GripperInFrontButton ) = False [Source: Log]<br />
GripperIsInRelPos( Ro.1, MO.1, GripperInFrontDoor ) = False [Source: Log]<br />
M F,det =<br />
ContainerAccessible( MO.1 )<br />
IsPlacedOn( Pl.1, Ta.1 )<br />
IsInsideContainer( Pl.1, MO.1 )<br />
IsInPlacedPos( Pl.1, Ta.1, FreePlacePos )<br />
HasEmptyStoringSpace( MO.1 )<br />
Situations still possible (4):<br />
S 1 , S 4 , S 8 , S 11<br />
Determining ContainerAccessible( MO.1 )<br />
Executing FAC_COP_ContainerAccessible.1( MO.1 )<br />
SearchPosSCam( MO.1.EEL.PosSCam ) = Success<br />
MON.ContainerIsAccessible( MO.1.EEL.PosSCam ) = TRUE<br />
IT.FacDeterminedTrue( )<br />
Result:<br />
ContainerAccessible( MO.1 ) = True E H = 10 E K = 30<br />
Logical Conclusion returns 0 Fact(s):<br />
M F,SI =<br />
HoldsNothing( Ro.1 ) = True [Source: Mon]<br />
IsGripped( Ro.1, Pl.1 ) = False [Source: Log]<br />
IsInFreePos( Ro.1 ) = True [Source: Mon]<br />
GripperIsInRelPos( Ro.1, MO.1, GripperInFrontButton ) = False [Source: Log]<br />
GripperIsInRelPos( Ro.1, MO.1, GripperInFrontDoor ) = False [Source: Log]<br />
ContainerAccessible( MO.1 ) = True [Source: Mon]<br />
M F,det =<br />
IsPlacedOn( Pl.1, Ta.1 )<br />
IsInsideContainer( Pl.1, MO.1 )<br />
IsInPlacedPos( Pl.1, Ta.1, FreePlacePos )<br />
HasEmptyStoringSpace( MO.1 )<br />
Situations still possible (2):<br />
S 4 , S 8<br />
Determining IsPlacedOn( Pl.1, Ta.1 )<br />
102
