

Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
4. Anforderungen an Methoden zur teilautonomen Umgebungserfassung<br />
tionsübergängen weggelassen, es handelt sich aber um dieselben Operationen wie in Bild 3-1<br />
auf Seite 21.<br />
Situation 1<br />
[Ro.1] 0<br />
[Bo.1,Gl.1,Tr.1] 0<br />
HoldsNothing(Ro.1) = TRUE<br />
IsFilled(Bo.1) = TRUE<br />
IsFilled(Gl.1) = FALSE<br />
IsInFreePos(Ro.1) = TRUE<br />
IsInPlacedPos(Bo.1,Tr.1,FreePlacePos) = TRUE<br />
IsInPlacedOn(Bo.1,Tr.1) = TRUE<br />
IsInPlacedOn(Gl.1,Tr.1) = TRUE<br />
Situation 2<br />
HoldsNothing(Ro.1) = FALSE<br />
IsFilled(Bo.1) = TRUE<br />
IsFilled(Gl.1) = FALSE<br />
IsGripped(Ro.1,Bo.1) = TRUE<br />
IsInFreePos(Ro.1) = FALSE<br />
IsInPlacedPos(Bo.1,Tr.1,FreePlacePos) = TRUE<br />
IsInRelPos(Ro.1,Bo.1,Gl.1,PourInRelPos) = FALSE<br />
IsInPlacedOn(Bo.1,Tr.1) = TRUE<br />
IsInPlacedOn(Gl.1,Tr.1) = TRUE<br />
[Bo.1,Gl.1,Ro.1,Tr.1] 0<br />
Situation 3<br />
HoldsNothing(Ro.1) = FALSE<br />
IsFilled(Bo.1) = TRUE<br />
IsFilled(Gl.1) = FALSE<br />
IsGripped(Ro.1,Bo.1) = TRUE<br />
IsInFreePos(Ro.1) = TRUE<br />
IsInPlacedOn(Gl.1,Tr.1) = TRUE<br />
[Gl.1,Tr.1] 0<br />
[Bo.1,Ro.1] 0<br />
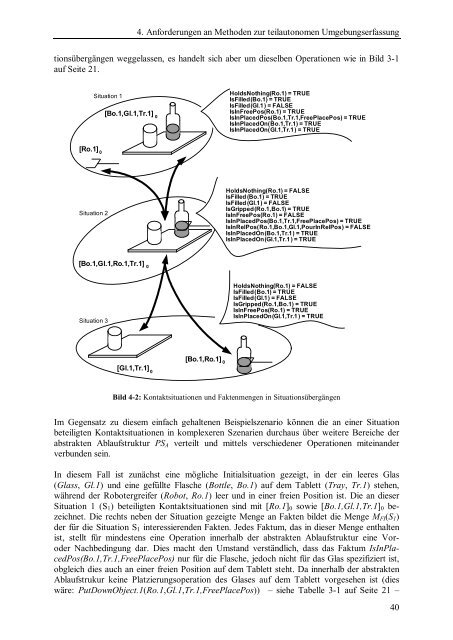
Bild 4-2: Kontaktsituationen und Faktenmengen in Situationsübergängen<br />
Im Gegensatz zu diesem einfach gehaltenen Beispielszenario können die an einer Situation<br />
beteiligten Kontaktsituationen in komplexeren Szenarien durchaus über weitere Bereiche der<br />
abstrakten Ablaufstruktur PS A verteilt und mittels verschiedener Operationen miteinander<br />
verbunden sein.<br />
In diesem Fall ist zunächst eine mögliche Initialsituation gezeigt, in der ein leeres Glas<br />
(Glass, Gl.1) und eine gefüllte Flasche (Bottle, Bo.1) auf dem Tablett (Tray, Tr.1) stehen,<br />
während der Robotergreifer (Robot, Ro.1) leer und in einer freien Position ist. Die an dieser<br />
Situation 1 (S 1 ) beteiligten Kontaktsituationen sind mit [Ro.1] 0 sowie [Bo.1,Gl.1,Tr.1] 0 bezeichnet.<br />
Die rechts neben der Situation gezeigte Menge an Fakten bildet die Menge M FI (S 1 )<br />
der für die Situation S 1 interessierenden Fakten. Jedes Faktum, das in dieser Menge enthalten<br />
ist, stellt für mindestens eine Operation innerhalb der abstrakten Ablaufstruktur eine Voroder<br />
Nachbedingung dar. Dies macht den Umstand verständlich, dass das Faktum IsInPlacedPos(Bo.1,Tr.1,FreePlacePos)<br />
nur für die Flasche, jedoch nicht für das Glas spezifiziert ist,<br />
obgleich dies auch an einer freien Position auf dem Tablett steht. Da innerhalb der abstrakten<br />
Ablaufstrukur keine Platzierungsoperation des Glases auf dem Tablett vorgesehen ist (dies<br />
wäre: PutDownObject.1(Ro.1,Gl.1,Tr.1,FreePlacePos)) – siehe Tabelle 3-1 auf Seite 21 –<br />
40
