

Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen
Diplomarbeit Doku 031217_final_2 - Universität Bremen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
6. Algorithmen zur teilautonomen Umgebungserfassung<br />
keitsüberprüfung bietet sich der Aufbau eines Situationsgraphens an. Dieser stellt alle in der<br />
abstrakten Ablaufstruktur möglichen Situationen dar und verbindet sie über die Operationen,<br />
die für den Übergang von einer Situation in die andere notwendig sind. Eine Situation kann<br />
dann als gültig innerhalb von PS *<br />
A anerkannt werden, wenn sie Bestandteil des Situationsgraphens<br />
ist.<br />
Die Verwendung eines Situationsgraphen bietet zudem folgende Vorteile:<br />
• Es lässt sich bestimmen, ob die abstrakte Ablaufstrukur ein zusammenhängendes<br />
UND/ODER-Netz beinhaltet. Dies ist ein Gültigkeitskriterium für eine abstrakte Ablaufstruktur<br />
(siehe Kapitel 4.3).<br />
• Es können Aussagen über die Gültigkeit und Erreichbarkeit der Zielsituation gemacht<br />
werden (wovon die Möglichkeit und Notwendigkeit der Plangeneration abhängt).<br />
Im Folgenden wird beschrieben, wie ein Situationsgraph zu implementieren und den Methoden<br />
der Umgebungserfassung zur Verfügung zu stellen ist.<br />
6.1.1 Der Situationsgraph<br />
Veranschaulichung eines Situationsgraphen<br />
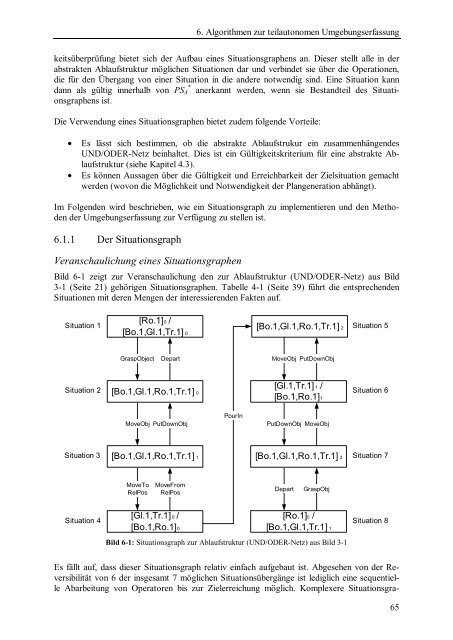
Bild 6-1 zeigt zur Veranschaulichung den zur Ablaufstruktur (UND/ODER-Netz) aus Bild<br />
3-1 (Seite 21) gehörigen Situationsgraphen. Tabelle 4-1 (Seite 39) führt die entsprechenden<br />
Situationen mit deren Mengen der interessierenden Fakten auf.<br />
Situation 1<br />
[Ro.1]0 /<br />
[Bo.1,Gl.1,Tr.1] 0<br />
[Bo.1,Gl.1,Ro.1,Tr.1] 2<br />
Situation 5<br />
GraspObject<br />
Depart<br />
MoveObj PutDownObj<br />
Situation 2<br />
[Bo.1,Gl.1,Ro.1,Tr.1] 0<br />
[Gl.1,Tr.1] 1 /<br />
[Bo.1,Ro.1]1<br />
Situation 6<br />
MoveObj PutDownObj<br />
PourIn<br />
PutDownObj MoveObj<br />
Situation 3<br />
[Bo.1,Gl.1,Ro.1,Tr.1] 1<br />
[Bo.1,Gl.1,Ro.1,Tr.1] 3<br />
Situation 7<br />
MoveTo<br />
RelPos<br />
MoveFrom<br />
RelPos<br />
Depart<br />
GraspObj<br />
Situation 4<br />
[Gl.1,Tr.1] 0 /<br />
[Bo.1,Ro.1]0<br />
[Ro.1]0 /<br />
[Bo.1,Gl.1,Tr.1] 1<br />
Bild 6-1: Situationsgraph zur Ablaufstruktur (UND/ODER-Netz) aus Bild 3-1<br />
Situation 8<br />
Es fällt auf, dass dieser Situationsgraph relativ einfach aufgebaut ist. Abgesehen von der Reversibilität<br />
von 6 der insgesamt 7 möglichen Situationsübergänge ist lediglich eine sequentielle<br />
Abarbeitung von Operatoren bis zur Zielerreichung möglich. Komplexere Situationsgra-<br />
65
