

Praktikum Realzeitprogrammierung Teil 2 - SPS - Technische ...
Praktikum Realzeitprogrammierung Teil 2 - SPS - Technische ...
Praktikum Realzeitprogrammierung Teil 2 - SPS - Technische ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
6.1 <strong>Teil</strong> 1 17<br />
6.1 <strong>Teil</strong> 1<br />
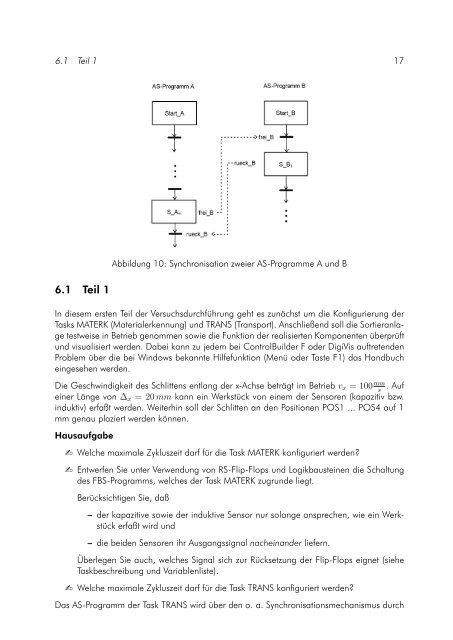
Abbildung 10: Synchronisation zweier AS-Programme A und B<br />
In diesem ersten <strong>Teil</strong> der Versuchsdurchführung geht es zunächst um die Konfigurierung der<br />
Tasks MATERK (Materialerkennung) und TRANS (Transport). Anschließend soll die Sortieranlage<br />
testweise in Betrieb genommen sowie die Funktion der realisierten Komponenten überprüft<br />
und visualisiert werden. Dabei kann zu jedem bei ControlBuilder F oder DigiVis auftretenden<br />
Problem über die bei Windows bekannte Hilfefunktion (Menü oder Taste F1) das Handbuch<br />
eingesehen werden.<br />
Die Geschwindigkeit des Schlittens entlang der x-Achse beträgt im Betrieb v x = 100 mm.<br />
Auf s<br />
einer Länge von ∆ x = 20 mm kann ein Werkstück von einem der Sensoren (kapazitiv bzw.<br />
induktiv) erfaßt werden. Weiterhin soll der Schlitten an den Positionen POS1 ... POS4 auf 1<br />
mm genau plaziert werden können.<br />
Hausaufgabe<br />
✍ Welche maximale Zykluszeit darf für die Task MATERK konfiguriert werden?<br />
✍ Entwerfen Sie unter Verwendung von RS-Flip-Flops und Logikbausteinen die Schaltung<br />
des FBS-Programms, welches der Task MATERK zugrunde liegt.<br />
Berücksichtigen Sie, daß<br />
– der kapazitive sowie der induktive Sensor nur solange ansprechen, wie ein Werkstück<br />
erfaßt wird und<br />
– die beiden Sensoren ihr Ausgangssignal nacheinander liefern.<br />
Überlegen Sie auch, welches Signal sich zur Rücksetzung der Flip-Flops eignet (siehe<br />
Taskbeschreibung und Variablenliste).<br />
✍ Welche maximale Zykluszeit darf für die Task TRANS konfiguriert werden?<br />
Das AS-Programm der Task TRANS wird über den o. a. Synchronisationsmechanismus durch
