

Predictive Control of Three Phase AC/DC Converters
Predictive Control of Three Phase AC/DC Converters
Predictive Control of Three Phase AC/DC Converters

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
44 CHAPTER 4. PREDICTIVE DIRECT POWER CONTROL<br />
(a)<br />
(b)<br />
0<br />
∆ P 0<br />
∆ P 7<br />
∆ P 6<br />
∆ P 1<br />
∆ P 2 ∆ P 3<br />
∆ P 4<br />
∆ P 5<br />
0<br />
∆ Q 7<br />
∆ Q 0<br />
∆ Q 4<br />
∆ Q 5<br />
∆ Q 6<br />
∆ Q 1<br />
∆ Q 2<br />
∆ Q 3<br />
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02<br />
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02<br />
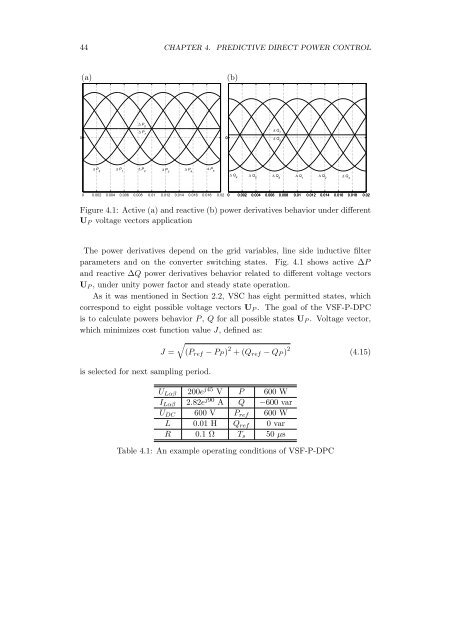
Figure 4.1: Active (a) and reactive (b) power derivatives behavior under different<br />
U P voltage vectors application<br />
The power derivatives depend on the grid variables, line side inductive filter<br />
parameters and on the converter switching states. Fig. 4.1 shows active ∆P<br />
and reactive ∆Q power derivatives behavior related to different voltage vectors<br />
U P , under unity power factor and steady state operation.<br />
As it was mentioned in Section 2.2, VSC has eight permitted states, which<br />
correspond to eight possible voltage vectors U P . The goal <strong>of</strong> the VSF-P-DPC<br />
is to calculate powers behavior P , Q for all possible states U P . Voltage vector,<br />
which minimizes cost function value J, defined as:<br />
√<br />
J = (P ref − P P ) 2 + (Q ref − Q P ) 2 (4.15)<br />
is selected for next sampling period.<br />
U Lαβ 200e j45 V P 600 W<br />
I Lαβ 2.82e j90 A Q −600 var<br />
U <strong>DC</strong> 600 V P ref 600 W<br />
L 0.01 H Q ref 0 var<br />
R 0.1 Ω T s 50 µs<br />
Table 4.1: An example operating conditions <strong>of</strong> VSF-P-DPC













![[TCP] Opis układu - Instytut Sterowania i Elektroniki Przemysłowej ...](https://img.yumpu.com/23535443/1/184x260/tcp-opis-ukladu-instytut-sterowania-i-elektroniki-przemyslowej-.jpg?quality=85)
