

Volume 2, Issue 1, 2011, Full Text - 5th International Conference on ...
Volume 2, Issue 1, 2011, Full Text - 5th International Conference on ...
Volume 2, Issue 1, 2011, Full Text - 5th International Conference on ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Imaginary Axis<br />
Imaginary Axis<br />
Imaginary Axis<br />
Imaginary Axis<br />
Imaginary Axis<br />
Sustainable C<strong>on</strong>structi<strong>on</strong> and Design <str<strong>on</strong>g>2011</str<strong>on</strong>g><br />
a<br />
8<br />
6<br />
System Poles<br />
b<br />
8<br />
6<br />
System Poles<br />
4<br />
4<br />
2<br />
2<br />
0<br />
0<br />
-2<br />
-2<br />
-4<br />
-4<br />
-6<br />
-6<br />
-8<br />
-10 -8 -6 -4 -2 0 2<br />
Real Axis<br />
-8<br />
-10 -8 -6 -4 -2 0 2<br />
Real Axis<br />
c<br />
6<br />
4<br />
2<br />
System Poles<br />
d<br />
8<br />
6<br />
4<br />
2<br />
a<br />
b<br />
System Poles<br />
a<br />
b<br />
0<br />
0<br />
-2<br />
-2<br />
-4<br />
-4<br />
-6<br />
-6<br />
-12 -10 -8 -6 -4 -2 0<br />
Real Axis<br />
-8<br />
-10 -8 -6 -4 -2 0 2<br />
Real Axis<br />
System Poles<br />
10<br />
e<br />
8<br />
a. increasing ground speed: loosing<br />
6<br />
4<br />
2<br />
0<br />
-2<br />
-4<br />
-6<br />
-8<br />
-10<br />
-10 -8 -6 -4 -2 0 2 4<br />
Real Axis<br />
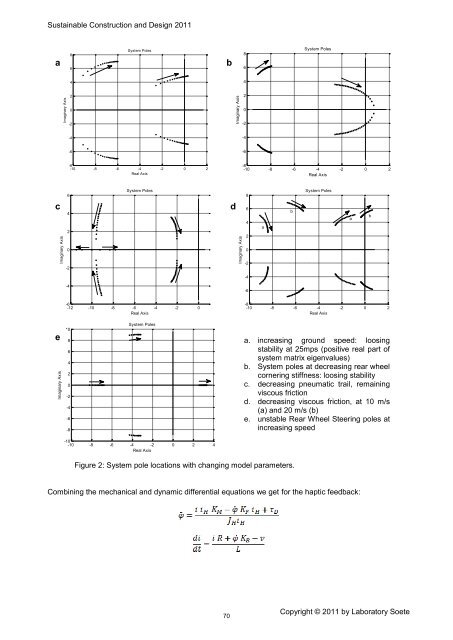
Figure 2: System pole locati<strong>on</strong>s with changing model parameters.<br />
stability at 25mps (positive real part of<br />
system matrix eigenvalues)<br />
b. System poles at decreasing rear wheel<br />
cornering stiffness: loosing stability<br />
c. decreasing pneumatic trail, remaining<br />
viscous fricti<strong>on</strong><br />
d. decreasing viscous fricti<strong>on</strong>, at 10 m/s<br />
(a) and 20 m/s (b)<br />
e. unstable Rear Wheel Steering poles at<br />
increasing speed<br />
Combining the mechanical and dynamic differential equati<strong>on</strong>s we get for the haptic feedback:<br />
70<br />
Copyright © <str<strong>on</strong>g>2011</str<strong>on</strong>g> by Laboratory Soete













