

Master Thesis - Hochschule Bonn-Rhein-Sieg
Master Thesis - Hochschule Bonn-Rhein-Sieg
Master Thesis - Hochschule Bonn-Rhein-Sieg

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2. Overview on human-robot <strong>Master</strong> <strong>Thesis</strong> Björn Ostermann page 10 of 126<br />
2 Overview on human-robot collaboration<br />
2.1 State of the art<br />
Since the invention of the joint arm robot in 1954 by George Devol, founder of the company<br />
Unimation, and its first usage in 1962 by General Motors [64], humans have been separated from<br />
industrial robots to assure their safety. Until the end of the 20 th century this separation was achieved by<br />
rigid fences.<br />
A major step towards a fenceless workplace was achieved in 1996, when the sourcecode SICK<br />
programmed for lasercannes was approved or safety related applications [60] by the BGIA, and later<br />
in 1998, when the first laser scanner, the PLS 101-312 by SICK, was approved for safety related<br />
applications [60] by the BGIA.<br />
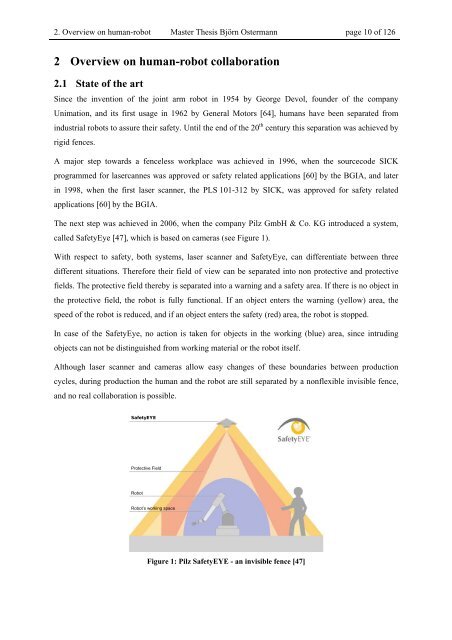
The next step was achieved in 2006, when the company Pilz GmbH & Co. KG introduced a system,<br />
called SafetyEye [47], which is based on cameras (see Figure 1).<br />
With respect to safety, both systems, laser scanner and SafetyEye, can differentiate between three<br />
different situations. Therefore their field of view can be separated into non protective and protective<br />
fields. The protective field thereby is separated into a warning and a safety area. If there is no object in<br />
the protective field, the robot is fully functional. If an object enters the warning (yellow) area, the<br />
speed of the robot is reduced, and if an object enters the safety (red) area, the robot is stopped.<br />
In case of the SafetyEye, no action is taken for objects in the working (blue) area, since intruding<br />
objects can not be distinguished from working material or the robot itself.<br />
Although laser scanner and cameras allow easy changes of these boundaries between production<br />
cycles, during production the human and the robot are still separated by a nonflexible invisible fence,<br />
and no real collaboration is possible.<br />
SafetyEYE<br />
Protective Field<br />
Robot<br />
Robot’s working space<br />
Figure 1: Pilz SafetyEYE - an invisible fence [47]











