

Master Thesis - Hochschule Bonn-Rhein-Sieg
Master Thesis - Hochschule Bonn-Rhein-Sieg
Master Thesis - Hochschule Bonn-Rhein-Sieg

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
4. Overall evading concept <strong>Master</strong> <strong>Thesis</strong> Björn Ostermann page 37 of 126<br />
- Region extraction (algorithm see chapter 5.2.4.1) and identification from the found intrusions<br />
(algorithm see chapter 5.2.4.3)<br />
- Computation of the distance between robot and other regions (algorithm see chapter 5.4)<br />
- Display of this distance (see Figure 27a)<br />
- Computation of the space that can be reached by the robot (algorithm see chapter 5.5.3)<br />
- Display of this space (see Figure 27b)<br />
Since the computations and presentations of the results require a certain amount of processor time,<br />
each part of the processing loop can be switched on and off by the user using the GUI (see Figure 19).<br />
This allows for single testing of the routines as well as an optimized working process.<br />
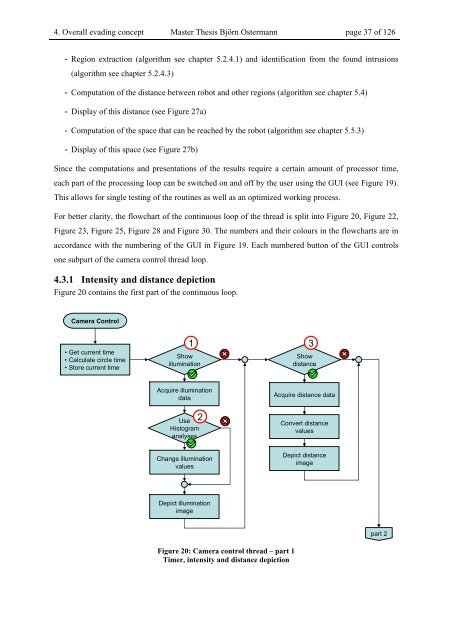
For better clarity, the flowchart of the continuous loop of the thread is split into Figure 20, Figure 22,<br />
Figure 23, Figure 25, Figure 28 and Figure 30. The numbers and their colours in the flowcharts are in<br />
accordance with the numbering of the GUI in Figure 19. Each numbered button of the GUI controls<br />
one subpart of the camera control thread loop.<br />
4.3.1 Intensity and distance depiction<br />
Figure 20 contains the first part of the continuous loop.<br />
Camera Control<br />
• Get current time<br />
• Calculate circle time<br />
• Store current time<br />
1<br />
Show<br />
illumination<br />
Acquire illumination<br />
data<br />
2<br />
Use<br />
Histogram<br />
analyses<br />
Change illumination<br />
values<br />
Depict illumination<br />
image<br />
Figure 20: Camera control thread – part 1<br />
Timer, intensity and distance depiction<br />
3<br />
Show<br />
distance<br />
Acquire distance data<br />
Convert distance<br />
values<br />
Depict distance<br />
image<br />
part 2











