

Master Thesis - Hochschule Bonn-Rhein-Sieg
Master Thesis - Hochschule Bonn-Rhein-Sieg
Master Thesis - Hochschule Bonn-Rhein-Sieg

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
4. Overall evading concept <strong>Master</strong> <strong>Thesis</strong> Björn Ostermann page 34 of 126<br />
PC Program<br />
GUI<br />
Parameters / Image Information<br />
Parameters<br />
Parameters<br />
Movement<br />
commands<br />
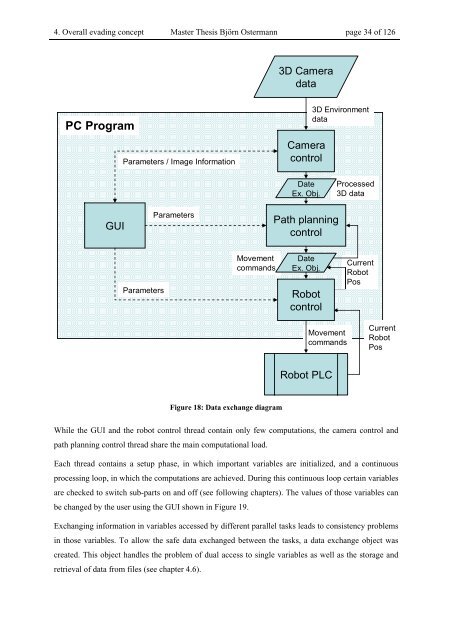
Figure 18: Data exchange diagram<br />
3D Camera<br />
data<br />
Camera<br />
control<br />
Date<br />
Ex. Obj.<br />
Path planning<br />
control<br />
Date<br />
Ex. Obj.<br />
Robot<br />
control<br />
Robot PLC<br />
3D Environment<br />
data<br />
Movement<br />
commands<br />
Processed<br />
3D data<br />
Current<br />
Robot<br />
Pos<br />
Current<br />
Robot<br />
Pos<br />
While the GUI and the robot control thread contain only few computations, the camera control and<br />
path planning control thread share the main computational load.<br />
Each thread contains a setup phase, in which important variables are initialized, and a continuous<br />
processing loop, in which the computations are achieved. During this continuous loop certain variables<br />
are checked to switch sub-parts on and off (see following chapters). The values of those variables can<br />
be changed by the user using the GUI shown in Figure 19.<br />
Exchanging information in variables accessed by different parallel tasks leads to consistency problems<br />
in those variables. To allow the safe data exchanged between the tasks, a data exchange object was<br />
created. This object handles the problem of dual access to single variables as well as the storage and<br />
retrieval of data from files (see chapter 4.6).











