

Master Thesis - Hochschule Bonn-Rhein-Sieg
Master Thesis - Hochschule Bonn-Rhein-Sieg
Master Thesis - Hochschule Bonn-Rhein-Sieg

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4. Overall evading concept <strong>Master</strong> <strong>Thesis</strong> Björn Ostermann page 50 of 126<br />
4.4.1 Basic work routine<br />
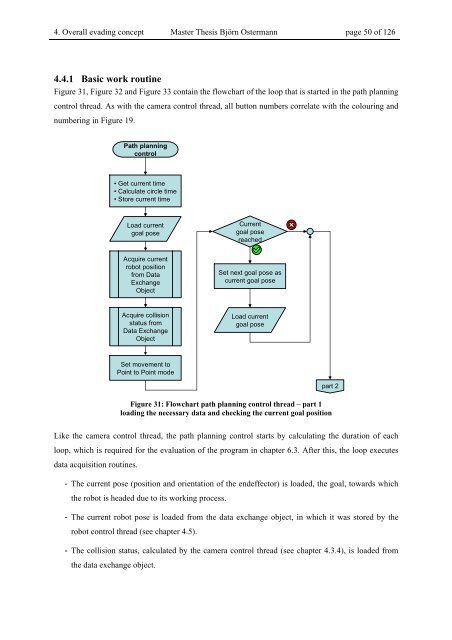
Figure 31, Figure 32 and Figure 33 contain the flowchart of the loop that is started in the path planning<br />
control thread. As with the camera control thread, all button numbers correlate with the colouring and<br />
numbering in Figure 19.<br />
Path planning<br />
control<br />
• Get current time<br />
• Calculate circle time<br />
• Store current time<br />
Load current<br />
goal pose<br />
Acquire current<br />
robot position<br />
from Data<br />
Exchange<br />
Object<br />
Acquire collision<br />
status from<br />
Data Exchange<br />
Object<br />
Set movement to<br />
Point to Point mode<br />
Current<br />
goal pose<br />
reached<br />
Set next goal pose as<br />
current goal pose<br />
Load current<br />
goal pose<br />
part 2<br />
Figure 31: Flowchart path planning control thread – part 1<br />
loading the necessary data and checking the current goal position<br />
Like the camera control thread, the path planning control starts by calculating the duration of each<br />
loop, which is required for the evaluation of the program in chapter 6.3. After this, the loop executes<br />
data acquisition routines.<br />
- The current pose (position and orientation of the endeffector) is loaded, the goal, towards which<br />
the robot is headed due to its working process.<br />
- The current robot pose is loaded from the data exchange object, in which it was stored by the<br />
robot control thread (see chapter 4.5).<br />
- The collision status, calculated by the camera control thread (see chapter 4.3.4), is loaded from<br />
the data exchange object.











