

Master Thesis - Hochschule Bonn-Rhein-Sieg
Master Thesis - Hochschule Bonn-Rhein-Sieg
Master Thesis - Hochschule Bonn-Rhein-Sieg

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4. Overall evading concept <strong>Master</strong> <strong>Thesis</strong> Björn Ostermann page 48 of 126<br />
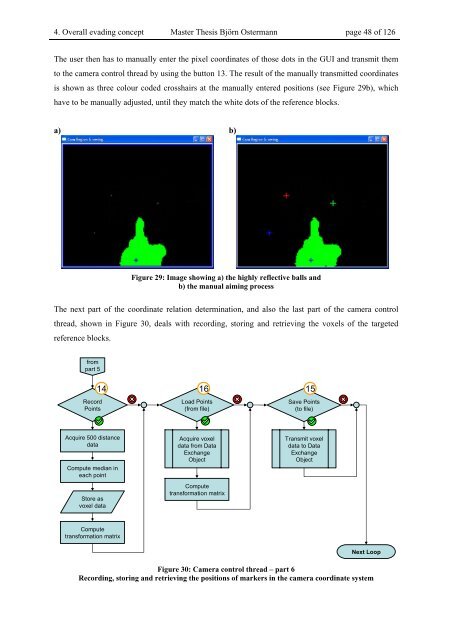
The user then has to manually enter the pixel coordinates of those dots in the GUI and transmit them<br />
to the camera control thread by using the button 13. The result of the manually transmitted coordinates<br />
is shown as three colour coded crosshairs at the manually entered positions (see Figure 29b), which<br />
have to be manually adjusted, until they match the white dots of the reference blocks.<br />
a) b)<br />
Figure 29: Image showing a) the highly reflective balls and<br />
b) the manual aiming process<br />
The next part of the coordinate relation determination, and also the last part of the camera control<br />
thread, shown in Figure 30, deals with recording, storing and retrieving the voxels of the targeted<br />
reference blocks.<br />
from<br />
part 5<br />
Record<br />
Points<br />
Acquire 500 distance<br />
data<br />
Compute median in<br />
each point<br />
Store as<br />
voxel data<br />
Compute<br />
transformation matrix<br />
14 16 15<br />
Load Points<br />
(from file)<br />
Acquire voxel<br />
data from Data<br />
Exchange<br />
Object<br />
Compute<br />
transformation matrix<br />
Save Points<br />
(to file)<br />
Transmit voxel<br />
data to Data<br />
Exchange<br />
Object<br />
Next Loop<br />
Figure 30: Camera control thread – part 6<br />
Recording, storing and retrieving the positions of markers in the camera coordinate system











