

Master Thesis - Hochschule Bonn-Rhein-Sieg
Master Thesis - Hochschule Bonn-Rhein-Sieg
Master Thesis - Hochschule Bonn-Rhein-Sieg

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3. Hard- and software <strong>Master</strong> <strong>Thesis</strong> Björn Ostermann page 32 of 126<br />
of the robot. Afterwards it is continually needed to act as a hold to run button, while the robot is<br />
remotely controlled by the PC.<br />
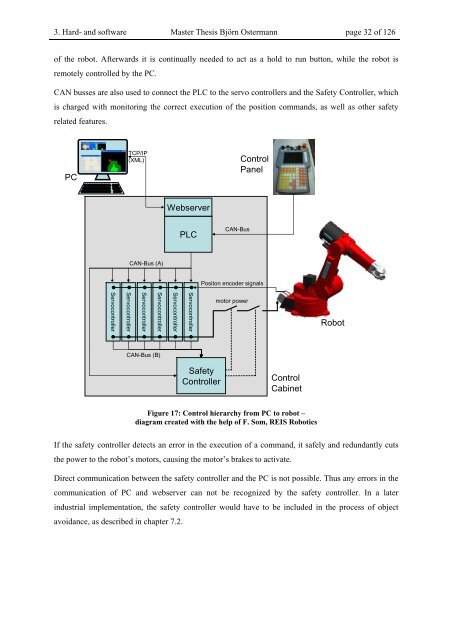
CAN busses are also used to connect the PLC to the servo controllers and the Safety Controller, which<br />
is charged with monitoring the correct execution of the position commands, as well as other safety<br />
related features.<br />
PC<br />
Servocontroller<br />
TCP/IP<br />
(XML)<br />
CAN-Bus (A)<br />
Servocontroller<br />
Servocontroller<br />
CAN-Bus (B)<br />
Servocontroller<br />
Webserver<br />
Servocontroller<br />
PLC<br />
Servocontroller<br />
Safety<br />
Controller<br />
CAN-Bus<br />
Positon encoder signals<br />
motor power<br />
Control<br />
Panel<br />
Control<br />
Cabinet<br />
Figure 17: Control hierarchy from PC to robot –<br />
diagram created with the help of F. Som, REIS Robotics<br />
Robot<br />
If the safety controller detects an error in the execution of a command, it safely and redundantly cuts<br />
the power to the robot’s motors, causing the motor’s brakes to activate.<br />
Direct communication between the safety controller and the PC is not possible. Thus any errors in the<br />
communication of PC and webserver can not be recognized by the safety controller. In a later<br />
industrial implementation, the safety controller would have to be included in the process of object<br />
avoidance, as described in chapter 7.2.











