

Master Thesis - Hochschule Bonn-Rhein-Sieg
Master Thesis - Hochschule Bonn-Rhein-Sieg
Master Thesis - Hochschule Bonn-Rhein-Sieg

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
2. Overview on human-robot <strong>Master</strong> <strong>Thesis</strong> Björn Ostermann page 16 of 126<br />
a) b)<br />
intruding Object<br />
Blind Spot Blind Spot<br />
Camera<br />
Robot<br />
intruding Object<br />
Blind Spot<br />
Blind Spot<br />
Camera<br />
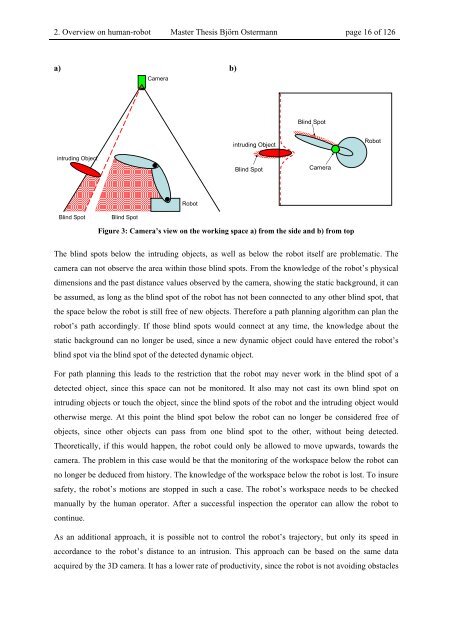
Figure 3: Camera’s view on the working space a) from the side and b) from top<br />
The blind spots below the intruding objects, as well as below the robot itself are problematic. The<br />
camera can not observe the area within those blind spots. From the knowledge of the robot’s physical<br />
dimensions and the past distance values observed by the camera, showing the static background, it can<br />
be assumed, as long as the blind spot of the robot has not been connected to any other blind spot, that<br />
the space below the robot is still free of new objects. Therefore a path planning algorithm can plan the<br />
robot’s path accordingly. If those blind spots would connect at any time, the knowledge about the<br />
static background can no longer be used, since a new dynamic object could have entered the robot’s<br />
blind spot via the blind spot of the detected dynamic object.<br />
For path planning this leads to the restriction that the robot may never work in the blind spot of a<br />
detected object, since this space can not be monitored. It also may not cast its own blind spot on<br />
intruding objects or touch the object, since the blind spots of the robot and the intruding object would<br />
otherwise merge. At this point the blind spot below the robot can no longer be considered free of<br />
objects, since other objects can pass from one blind spot to the other, without being detected.<br />
Theoretically, if this would happen, the robot could only be allowed to move upwards, towards the<br />
camera. The problem in this case would be that the monitoring of the workspace below the robot can<br />
no longer be deduced from history. The knowledge of the workspace below the robot is lost. To insure<br />
safety, the robot’s motions are stopped in such a case. The robot’s workspace needs to be checked<br />
manually by the human operator. After a successful inspection the operator can allow the robot to<br />
continue.<br />
As an additional approach, it is possible not to control the robot’s trajectory, but only its speed in<br />
accordance to the robot’s distance to an intrusion. This approach can be based on the same data<br />
acquired by the 3D camera. It has a lower rate of productivity, since the robot is not avoiding obstacles<br />
Robot











