COUPLINGS
COUPLINGS
COUPLINGS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
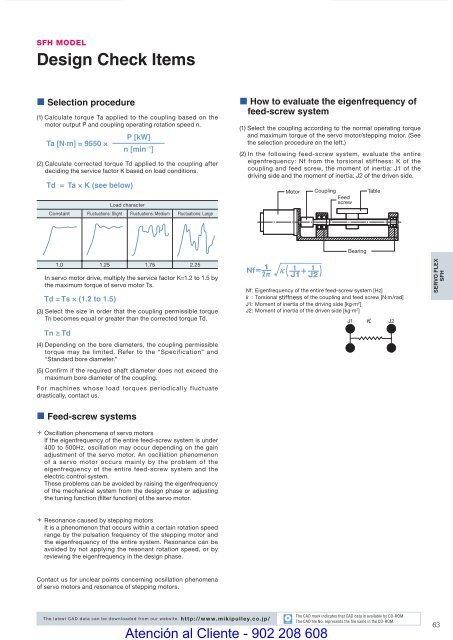
SFH MODELDesign Check Items• Selection procedure(1) Calculate torque Ta applied to the coupling based on themotor output P and coupling operating rotation speed n.Ta [N·m] = 9550 ×(2) Calculate corrected torque Td applied to the coupling afterdeciding the service factor K based on load conditions.Td = Ta × K (see below)P [kW]n [min −1 ]Load characterConstant Fluctuations: Slight Fluctuations: Medium Fluctuations: Large• How to evaluate the eigenfrequency offeed-screw system(1) Select the coupling according to the normal operating torqueand maximum torque of the servo motor/stepping motor. (Seethe selection procedure on the left.)(2) In the following feed-screw system, evaluate the entireeigenfrequency: Nf from the torsional stiffness: K of thecoupling and feed screw, the moment of inertia: J1 of thedriving side and the moment of inertia: J2 of the driven side.MotorCouplingFeedscrewTableBearing1.0 1.25 1.75 2.25In servo motor drive, multiply the service factor K=1.2 to 1.5 bythe maximum torque of servo motor Ts.Td = Ts × (1.2 to 1.5)(3) Select the size in order that the coupling permissible torqueTn becomes equal or greater than the corrected torque Td.Tn ≥ Td(4) Depending on the bore diameters, the coupling permissibletorque may be limited. Refer to the “Specification” and“Standard bore diameter.”(5) Confirm if the required shaft diameter does not exceed themaximum bore diameter of the coupling.For machines whose load torques periodically fluctuatedrastically, contact us.Nf: Eigenfrequency of the entire feed-screw system [Hz]k : Torsional stiffness of the coupling and feed screw [N·m/rad]J1: Moment of inertia of the driving side [kg·m 2 ]J2: Moment of inertia of the driven side [kg·m 2 ]J1J2SERVO FLEXSFH• Feed-screw systems Oscillation phenomena of servo motorsIf the eigenfrequency of the entire feed-screw system is under400 to 500Hz, oscillation may occur depending on the gainadjustment of the servo motor. An oscillation phenomenonof a servo motor occurs mainly by the problem of theeigenfrequency of the entire feed-screw system and theelectric control system.These problems can be avoided by raising the eigenfrequencyof the mechanical system from the design phase or adjustingthe tuning function (filter function) of the servo motor. Resonance caused by stepping motorsIt is a phenomenon that occurs within a certain rotation speedrange by the pulsation frequency of the stepping motor andthe eigenfrequency of the entire system. Resonance can beavoided by not applying the resonant rotation speed, or byreviewing the eigenfrequency in the design phase.Contact us for unclear points concerning ocsillation phenomenaof servo motors and resonance of stepping motors.The latest CAD data can be downloaded from our website. http://www.mikipulley.co.jp/COUPLING_E_56_65new.indd 63CADAtención al Cliente - 902 208 608The CAD mark indicates that CAD data is available by CD-ROM.The CAD fi le No. represents the fi le name in the CD-ROM.639/15/10 4:29 PM