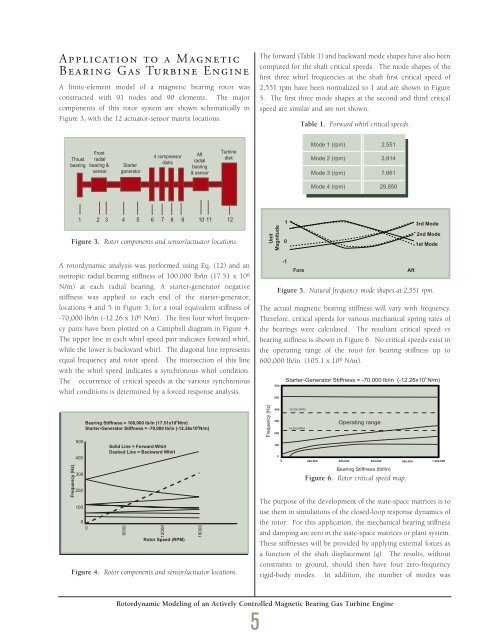
Application to a MagneticBearing Gas Turbine EngineA finite-element model of a magnetic bearing rotor wasconstructed with 91 nodes and 90 elements. The majorcomponents of this rotor system are shown schematically inFigure 3, with the 12 actuator-sensor matrix locations.The forward (Table 1) and backward mode shapes have also beencomputed for the shaft critical speeds. The mode shapes of thefirst three whirl frequencies at the shaft first critical speed of2,551 rpm have been normalized to 1 and are shown in Figure5. The first three mode shapes at the second and third criticalspeed are similar and are not shown.Table 1. Forward whirl critical speeds.ThrustbearingFrontradialbearing &sensorStartergenerator4 compressordisksAftradialbearing& sensorTurbinedisk1 2 3 4 5 6 7 8 9 10 11 1213rd ModeFigure 3. Rotor components and sensor/actuator locations.UnitMagnitude02nd Mode1st ModeA rotordynamic analysis was performed using Eq. (12) and anisotropic radial bearing stiffness of 100,000 lb/in (17.51 x 10 6N/m) at each radial bearing. A starter-generator negativestiffness was applied to each end of the starter-generator,locations 4 and 5 in Figure 3, for a total equivalent stiffness of-70,000 lb/in (-12.26 x 10 6 N/m). The first four whirl frequencypairs have been plotted on a Campbell diagram in Figure 4.The upper line in each whirl speed pair indicates forward whirl,while the lower is backward whirl. The diagonal line representsequal frequency and rotor speed. The intersection of this linewith the whirl speed indicates a synchronous whirl condition.The occurrence of critical speeds at the various synchronouswhirl conditions is determined by a forced response analysis.Figure 5. Natural frequency mode shapes at 2,551 rpm.The actual magnetic bearing stiffness will vary with frequency.Therefore, critical speeds for various mechanical spring rates ofthe bearings were calculated. The resultant critical speed vsbearing stiffness is shown in Figure 6. No critical speeds exist inthe operating range of the rotor for bearing stiffness up to600,000 lb/in (105.1 x 10 6 N/m).600500-1ForeStarter-Generator Stiffness = -70,000 lb/in (-12.26x10 6 N/m)Aft500400Bearing Stiffness = 100,000 lb/in (17.51x10 6 N/m)Starter-Generator Stiffness = -70,000 lb/in (-12.26x10 6 N/m)Solid Line = Forward WhirlDashed Line = Backward WhirlFrequency (Hz)400300200100022,000 RPMOperating range14,400 RPM0 200,000 400,000 600,000 800,000 1,000,000Frequency (Hz)300200100006000Figure 4. Rotor components and sensor/actuator locations.12000Rotor Speed (RPM)18000Bearing Stiffness (lbf/in)Figure 6. Rotor critical speed map.The purpose of the development of the state-space matrices is touse them in simulations of the closed-loop response dynamics ofthe rotor. For this application, the mechanical bearing stiffnessand damping are zero in the state-space matrices or plant system.These stiffnesses will be provided by applying external forces asa function of the shaft displacement {q}. The results, withoutconstraints to ground, should then have four zero-frequencyrigid-body modes. In addition, the number of modes wasRotordynamic Modeling of an Actively Controlled Magnetic Bearing Gas Turbine Engine5
chosen to be 24, for a total of 48 states. Table 2 lists thesenatural frequencies associated with the unconstrained rotor atzero rotor speed.Table 2. Rotor free-free natural frequencies.Ω++/-Plant Model[A] [B] [C]{u}Feedback Controller{q}[D]Figure 7. Feedback control loop.traces in Figures 8(b), 8(c), 8(e), and 8(f) represent the transferfunction coupling from the Y to Z coordinates at rotor speed dueto the speed-dependent Coriolis forces.Modal damping was input through the ζ damping term in the [A]matrix from Eq. (20). A value of 1% of critical damping will beused in this rotor model for all 24 modes. Note that this methodof applying modal damping represents external damping toground and will always be stabilizing. This approach is onlygood for small amounts of damping since large values of internaldamping can reduce the maximum rotor speed obtainable at theonset of instability.From the resulting eigenvectors, the [B] and [C] matrices wereconstructed for 12 actuator and sensor locations on the shaft (seeFigure 3). These 12 locations and 24 modes of Table 2 comprisea matrix of displacement and velocity eigenvector pairs in the [B]and [C] matrices.A feedback control system was then run in MATLAB to verify thatthe dynamics of the control matrices matched those of themechanical bearing rotor system. To accomplish this, themechanical bearing stiffness and negative starter generatorstiffness were added to a feedback controller in matrix [D]. Thefeedback control system is shown in Figure 7.Bode plots for the rotor transfer function have been made for thezero, minimum (13,400 rpm), and maximum (22,000 rpm) rotoroperational speeds for the free-free rotor, [D] = [0], and for theconstrained and loaded rotor. These are shown in Figure 8 withthe amplitude expressed in decibels. The units of amplitude, x,are displacement in feet divided by the applied force in pounds(0.00571 m/N). The input forcing function is applied in the Ydirection at the turbine disk and the output is in the Y and Zdirections at the bearings. The traces in Figure 8 represent atransfer function from a force applied at the turbine to thedisplacement at the bearing in the Y and Z directions. For thefirst two plots (Figures 8(a) and 8(d)), there is no Z output sincethere is no coupling at zero rotor speed. The two additionalThe Bode plot for the free-free rotor, Figure 8(a), at zero rotorspeed shows the expected resonance frequency of 101.5 Hz(6,090 rpm). An interesting phenomenon of these resonantfrequencies (poles) can be noticed as the rotor spins up in speedin Figures 8(b) and 8(c). First, the poles bifurcate. This can bebest observed by noticing that the 101.5-Hz peak in Figure 8(a)becomes two peaks in Figure 8(b), one slightly lower and theother somewhat higher than 101.5 Hz. These frequency pairs arethe backward and forward critical speeds, respectively. Second,the coupling between the Y and Z axis increases because of theCoriolis terms. Third, the lowest resonant frequency, which doesnot exist in the zero spin speed case, increases with speed toapproximately 30 Hz at 22,000 rpm. This subsynchronousfrequency is the precessional frequency of the rotor, and isessentially a rigid body motion.The supported rotor, Figure 8(d), at zero spin speed showsresonant frequencies at 41.6, 61.2, and 109.0 Hz. Thesecorrespond to the natural frequencies of the nonrotating shaft.Furthermore, at increasing rotor speeds (Figures 8(e) and 8(f)),they bifurcate into the forward and backward whirl frequenciesas predicted in Figure 4. This comparison shows that thecontrol matrices contain the dynamics of the rotating shaft andthat a sufficient number of modes were retained. Simulations ofthe above rotordynamic model on magnetic bearings withfrequency-dependent properties are presented in Ref. [3].SummaryA reduced-order rotordynamic state-space transfer-functionmodel of a rotor has been presented. It appears to be adequateto capture the essential closed-loop dynamics of the rotatingcomponents of a high-speed jet engine. A separate study (Part II,Scholten, 1996) uses the results of these state-space controlmatrices in a simulation model to develop a control system forthis shaft.Rotordynamic Modeling of an Actively Controlled Magnetic Bearing Gas Turbine Engine6
- Page 2 and 3:
Letter from thePresident and CEO,Vi
- Page 4 and 5:
Information TechnologyMilton AdamsE
- Page 6 and 7:
BiographyMilton Adams has been at D
- Page 9 and 10:
Figure 1 represents a functional de
- Page 11 and 12:
Programs. In effect, these controll
- Page 13 and 14:
Although the terminal area traffic
- Page 15 and 16:
Table 2. ATFM performance evaluatio
- Page 17 and 18:
In the experiments, a nominal capac
- Page 19 and 20:
[3] Wambsganss, Michael C. “Colla
- Page 21 and 22:
Guidance, Navigation, and Control A
- Page 23 and 24:
A Control Lyapunov FunctionApproach
- Page 25 and 26:
x( 0) ∈ X and w(t) ∈Wfor all t
- Page 27 and 28:
(b) Select a quadratic RCLF V i (x)
- Page 29 and 30:
at each grid point. In the case w 1
- Page 31 and 32:
References[1] Ball, J.A. and A.J. v
- Page 33 and 34:
Guidance, Navigation, and Control A
- Page 35 and 36:
Relative and Differential GPSData T
- Page 37 and 38:
The first term on the right in the
- Page 39 and 40:
H R# δρ R,GPS -H A# δρ A,GPSThi
- Page 41 and 42:
selection; and (3) shown that the a
- Page 43 and 44:
Guidance, Navigation, and Control A
- Page 45 and 46:
Segmentation of MR ImagesUsing Curv
- Page 47 and 48:
(3)where ν now represents a contin
- Page 49 and 50: Experimental ResultsThe results of
- Page 51 and 52: Table 1. A summary of segmentation
- Page 53 and 54: Guidance, Navigation,and ControlJim
- Page 55 and 56: BiographyGeorge SchmidtGeorge Schmi
- Page 57 and 58: clock and ephemeris errors, as well
- Page 59 and 60: maintained in a rigid structure, wh
- Page 61 and 62: Table 5. “Typical” absolute GPS
- Page 63 and 64: performed, then the target location
- Page 65 and 66: tightly-coupled system, however, ca
- Page 67 and 68: Concluding RemarksRecent progress i
- Page 69 and 70: As real-time systems evolve into th
- Page 71 and 72: Advanced Fault-TolerantComputing fo
- Page 73 and 74: The Viking and Voyager were both in
- Page 75 and 76: Containment Regions (FCRs). There a
- Page 77 and 78: well as reversing the whole process
- Page 79 and 80: As real-time systems evolve into th
- Page 81 and 82: Automated Station-Keepingfor Satell
- Page 83 and 84: Figure 2. Minimum elevation angles
- Page 85 and 86: anomaly M and/or the ascending node
- Page 87 and 88: However, since optimization and rec
- Page 89 and 90: is maintained in the Northern Hemis
- Page 91 and 92: autonomy. It must have the ability
- Page 93 and 94: [31] Neelon, Joseph G., Jr., Paul J
- Page 95 and 96: Draper’s primary goal is to Drape
- Page 97 and 98: )Rotordynamic Modelingof an Activel
- Page 99: Eq. (9) becomes:λ[ R ] { Φ } = [
- Page 103 and 104: InertialInstruments/MechanicalDesig
- Page 105 and 106: BiographyJeffrey Borenstein is curr
- Page 107 and 108: process step. Process information i
- Page 109 and 110: Figure 4. Control chart for boron d
- Page 111 and 112: References[1] Barbour, N., J. Conne
- Page 113 and 114: Draper Laboratory continues to engi
- Page 115 and 116: Validating the Validating Tool:Defi
- Page 117 and 118: calculates miscellaneous terms, suc
- Page 119 and 120: Table 1. Suggested specification sh
- Page 121 and 122: User Accuracy as aFunction of Simul
- Page 123 and 124: 20-min averaging, this clock lockin
- Page 125 and 126: Table 2. Sample high-level summary
- Page 127 and 128: AcknowledgmentR.L. Greenspan, J.A.
- Page 129 and 130: Systems IntegrationRich MartoranaPe
- Page 131 and 132: BiographyAnthony Kourepenis is an A
- Page 133 and 134: control is employed to maintain the
- Page 135 and 136: Table 1. Summary of automotive yaw
- Page 137 and 138: Resolution (60 Hz) deg/h10000000100
- Page 139 and 140: References[1] Greiff, P., B. Boxenh
- Page 141 and 142: Guidance, Navigation, and Control A
- Page 143 and 144: An Integrated Safety AnalysisMethod
- Page 145 and 146: Infrastructure ModelsSystemRequirem
- Page 147 and 148: Figures 6 and 7 illustrate the bloc
- Page 149 and 150: Notice that each flight track descr
- Page 151 and 152:
Table 7. Safety statistics at 1700-
- Page 153 and 154:
Guidance, Navigation, and Control A
- Page 155 and 156:
An Optimal Guidance Law forPlanetar
- Page 157 and 158:
Note that the states in the three d
- Page 159 and 160:
Crossrange (Kft)10090807060504030Cl
- Page 161 and 162:
The 1997 Charles StarkDraper PrizeT
- Page 163 and 164:
The 1997 Charles StarkDraper Prize1
- Page 165 and 166:
“Draper encourages its personnel
- Page 167 and 168:
Gimballed Vibrating GyroscopeHaving
- Page 169 and 170:
“Draper encourages its personnel
- Page 171 and 172:
Optical Source Isolator withPolariz
- Page 173 and 174:
“Draper encourages its personnel
- Page 175 and 176:
Hunting Suppressor forPolyphase Ele
- Page 177 and 178:
“Draper encourages its personnel
- Page 179 and 180:
Sensor Having an Off-Frequency Driv
- Page 181 and 182:
proof mass from transients and enha
- Page 183 and 184:
1997 Published PapersThe following
- Page 185 and 186:
monitoring of space structures and
- Page 187 and 188:
measured by kinematic degrees of fr
- Page 189 and 190:
i.e., what percent of the earth’s
- Page 191 and 192:
McConley, M. W.; Dahleh, M. A.; Fer
- Page 193 and 194:
unaffordable, or even misguided. Bu
- Page 195 and 196:
The Draper DistinguishedPerformance
- Page 197:
Educational Activitiesat Draper Lab