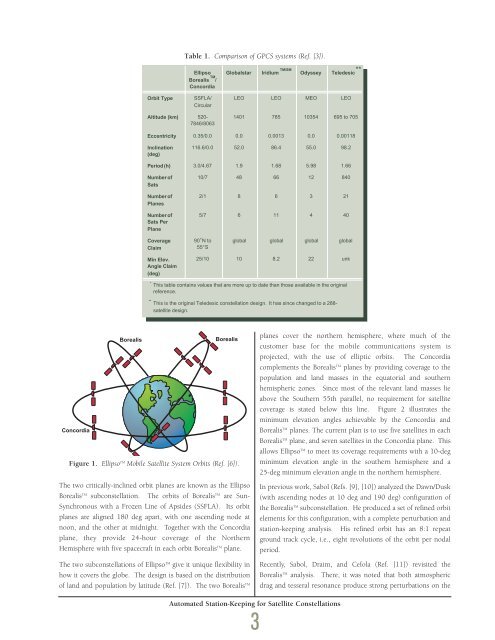
Table 1. Comparison of GPCS systems (Ref. [3]).ConcordiaBorealisBorealisFigure 1. Ellipso TM Mobile Satellite System Orbits (Ref. [6]).The two critically-inclined orbit planes are known as the EllipsoBorealis TM subconstellation. The orbits of Borealis TM are Sun-Synchronous with a Frozen Line of Apsides (SSFLA). Its orbitplanes are aligned 180 deg apart, with one ascending node atnoon, and the other at midnight. Together with the Concordiaplane, they provide 24-hour coverage of the NorthernHemisphere with five spacecraft in each orbit Borealis TM plane.The two subconstellations of Ellipso TM give it unique flexibility inhow it covers the globe. The design is based on the distributionof land and population by latitude (Ref. [7]). The two Borealis TMplanes cover the northern hemisphere, where much of thecustomer base for the mobile communications system isprojected, with the use of elliptic orbits. The Concordiacomplements the Borealis TM planes by providing coverage to thepopulation and land masses in the equatorial and southernhemispheric zones. Since most of the relevant land masses lieabove the Southern 55th parallel, no requirement for satellitecoverage is stated below this line. Figure 2 illustrates theminimum elevation angles achievable by the Concordia andBorealis TM planes. The current plan is to use five satellites in eachBorealis TM plane, and seven satellites in the Concordia plane. Thisallows Ellipso TM to meet its coverage requirements with a 10-degminimum elevation angle in the southern hemisphere and a25-deg minimum elevation angle in the northern hemisphere.In previous work, Sabol (Refs. [9], [10]) analyzed the Dawn/Dusk(with ascending nodes at 10 deg and 190 deg) configuration ofthe Borealis TM subconstellation. He produced a set of refined orbitelements for this configuration, with a complete perturbation andstation-keeping analysis. His refined orbit has an 8:1 repeatground track cycle, i.e., eight revolutions of the orbit per nodalperiod.Recently, Sabol, Draim, and Cefola (Ref. [11]) revisited theBorealis TM analysis. There, it was noted that both atmosphericdrag and tesseral resonance produce strong perturbations on theAutomated Station-Keeping for Satellite Constellations3
Figure 2. Minimum elevation angles as function of latitude: six-,and seven-satellite Concordia arrays, and four-, and fivesatelliteBorealis arrays (Ref. [8]).8:1 repeat ground-track orbit, with undesirable implications onthe station-keeping fuel budget. The current baseline Ellipso TMsystem requires a Noon/Midnight orientation of the Borealis TMplanes (with nodes at 280 deg and 100 deg). This orientationintroduces significant solar radiation pressure effects. Theirresolution to these problems was to produce a slightly refined setof orbital elements for an 81:10 repeat ground track. The refinedelement set produces a significant savings in the fuel budget, andeliminates the need for out-of-plane maneuvers. Table 2 containsthe refined 8:1 orbital elements, while Table 3 contains the refined81:10 orbital elements for the Noon/Midnight configuration andelements for Concordia. In the remainder of this paper, adescription of the algorithms and architecture of ASKS will beprovided. Station-keeping strategies for the Ellipso Borealis TMTable 2. Borealis TM 8:1 mean element sets(Ref. [11]).global wireless communication system will be explored with theASKS tool.Automated Station-Keeping SimulatorASKS is an analysis and software package that combines anaccurate satellite orbit propagator and an optimal impulsiverendezvous planner. It is designed to develop and test controlmethodologies for the constellation station-keeping problem in aparallel, scaleable computing environment. It was designed to bean accurate, useful tool that can be applied to virtually any typeof satellite constellation. Special care was taken throughout thedevelopment process to avoid making assumptions about theconstellations to be considered, thus making ASKS as generallyapplicable as possible. It may be used to analyze satellite orbits ofvirtually any type: LEO, Medium Earth Orbit (MEO), High EarthOrbit (HEO), GEO, etc. ASKS is also a work in progress. It isexpected that more functionality will be added in the future.ASKS executes on a network of workstations using the MPIprotocol. The number of satellites in the constellation defines thenumber of processes that will execute in a parallel processingenvironment. Computing capability can be added by simplyadding more workstations to the parallel network anddistributing the workload. It employs the <strong>Draper</strong> SemianalyticalSatellite Theory (DSST) stand-alone propagator, which hasdemonstrated accuracy with low, medium, and highly eccentricorbits (Refs. [14], [15]). The DSST mean element dynamicsproduce precise mean elements, which include the followingperturbations:Table 3. Ellipso Borealis TM (81:10) and Concordia Planes(Refs. [11], [13]).ElementNode atNoon PlaneTrue of DateNode atMidnightPlaneConcordiaPlanea 10472.201km10472.200km14440.137kme 0.32652 0.32662 0.00001II 116.583¡ 116.582¡ 0.00001 ¡ωω 270¡ 270¡ 90¡ΩΩ 280¡ 100¡ 0.0¡M 0¡, 72¡, 144¡,216¡, and288¡0¡, 72¡, 144¡,216¡, and288¡0¡, 51.43¡,102.86 ¡,154.29 ¡,205.71 ¡,257.14¡, and308.57¡EpochMidnight, Jan1, 1997Midnight, Jan1, 1997Automated Station-Keeping for Satellite Constellations4
- Page 2 and 3:
Letter from thePresident and CEO,Vi
- Page 4 and 5:
Information TechnologyMilton AdamsE
- Page 6 and 7:
BiographyMilton Adams has been at D
- Page 9 and 10:
Figure 1 represents a functional de
- Page 11 and 12:
Programs. In effect, these controll
- Page 13 and 14:
Although the terminal area traffic
- Page 15 and 16:
Table 2. ATFM performance evaluatio
- Page 17 and 18:
In the experiments, a nominal capac
- Page 19 and 20:
[3] Wambsganss, Michael C. “Colla
- Page 21 and 22:
Guidance, Navigation, and Control A
- Page 23 and 24:
A Control Lyapunov FunctionApproach
- Page 25 and 26:
x( 0) ∈ X and w(t) ∈Wfor all t
- Page 27 and 28:
(b) Select a quadratic RCLF V i (x)
- Page 29 and 30:
at each grid point. In the case w 1
- Page 31 and 32: References[1] Ball, J.A. and A.J. v
- Page 33 and 34: Guidance, Navigation, and Control A
- Page 35 and 36: Relative and Differential GPSData T
- Page 37 and 38: The first term on the right in the
- Page 39 and 40: H R# δρ R,GPS -H A# δρ A,GPSThi
- Page 41 and 42: selection; and (3) shown that the a
- Page 43 and 44: Guidance, Navigation, and Control A
- Page 45 and 46: Segmentation of MR ImagesUsing Curv
- Page 47 and 48: (3)where ν now represents a contin
- Page 49 and 50: Experimental ResultsThe results of
- Page 51 and 52: Table 1. A summary of segmentation
- Page 53 and 54: Guidance, Navigation,and ControlJim
- Page 55 and 56: BiographyGeorge SchmidtGeorge Schmi
- Page 57 and 58: clock and ephemeris errors, as well
- Page 59 and 60: maintained in a rigid structure, wh
- Page 61 and 62: Table 5. “Typical” absolute GPS
- Page 63 and 64: performed, then the target location
- Page 65 and 66: tightly-coupled system, however, ca
- Page 67 and 68: Concluding RemarksRecent progress i
- Page 69 and 70: As real-time systems evolve into th
- Page 71 and 72: Advanced Fault-TolerantComputing fo
- Page 73 and 74: The Viking and Voyager were both in
- Page 75 and 76: Containment Regions (FCRs). There a
- Page 77 and 78: well as reversing the whole process
- Page 79 and 80: As real-time systems evolve into th
- Page 81: Automated Station-Keepingfor Satell
- Page 85 and 86: anomaly M and/or the ascending node
- Page 87 and 88: However, since optimization and rec
- Page 89 and 90: is maintained in the Northern Hemis
- Page 91 and 92: autonomy. It must have the ability
- Page 93 and 94: [31] Neelon, Joseph G., Jr., Paul J
- Page 95 and 96: Draper’s primary goal is to Drape
- Page 97 and 98: )Rotordynamic Modelingof an Activel
- Page 99 and 100: Eq. (9) becomes:λ[ R ] { Φ } = [
- Page 101 and 102: chosen to be 24, for a total of 48
- Page 103 and 104: InertialInstruments/MechanicalDesig
- Page 105 and 106: BiographyJeffrey Borenstein is curr
- Page 107 and 108: process step. Process information i
- Page 109 and 110: Figure 4. Control chart for boron d
- Page 111 and 112: References[1] Barbour, N., J. Conne
- Page 113 and 114: Draper Laboratory continues to engi
- Page 115 and 116: Validating the Validating Tool:Defi
- Page 117 and 118: calculates miscellaneous terms, suc
- Page 119 and 120: Table 1. Suggested specification sh
- Page 121 and 122: User Accuracy as aFunction of Simul
- Page 123 and 124: 20-min averaging, this clock lockin
- Page 125 and 126: Table 2. Sample high-level summary
- Page 127 and 128: AcknowledgmentR.L. Greenspan, J.A.
- Page 129 and 130: Systems IntegrationRich MartoranaPe
- Page 131 and 132: BiographyAnthony Kourepenis is an A
- Page 133 and 134:
control is employed to maintain the
- Page 135 and 136:
Table 1. Summary of automotive yaw
- Page 137 and 138:
Resolution (60 Hz) deg/h10000000100
- Page 139 and 140:
References[1] Greiff, P., B. Boxenh
- Page 141 and 142:
Guidance, Navigation, and Control A
- Page 143 and 144:
An Integrated Safety AnalysisMethod
- Page 145 and 146:
Infrastructure ModelsSystemRequirem
- Page 147 and 148:
Figures 6 and 7 illustrate the bloc
- Page 149 and 150:
Notice that each flight track descr
- Page 151 and 152:
Table 7. Safety statistics at 1700-
- Page 153 and 154:
Guidance, Navigation, and Control A
- Page 155 and 156:
An Optimal Guidance Law forPlanetar
- Page 157 and 158:
Note that the states in the three d
- Page 159 and 160:
Crossrange (Kft)10090807060504030Cl
- Page 161 and 162:
The 1997 Charles StarkDraper PrizeT
- Page 163 and 164:
The 1997 Charles StarkDraper Prize1
- Page 165 and 166:
“Draper encourages its personnel
- Page 167 and 168:
Gimballed Vibrating GyroscopeHaving
- Page 169 and 170:
“Draper encourages its personnel
- Page 171 and 172:
Optical Source Isolator withPolariz
- Page 173 and 174:
“Draper encourages its personnel
- Page 175 and 176:
Hunting Suppressor forPolyphase Ele
- Page 177 and 178:
“Draper encourages its personnel
- Page 179 and 180:
Sensor Having an Off-Frequency Driv
- Page 181 and 182:
proof mass from transients and enha
- Page 183 and 184:
1997 Published PapersThe following
- Page 185 and 186:
monitoring of space structures and
- Page 187 and 188:
measured by kinematic degrees of fr
- Page 189 and 190:
i.e., what percent of the earth’s
- Page 191 and 192:
McConley, M. W.; Dahleh, M. A.; Fer
- Page 193 and 194:
unaffordable, or even misguided. Bu
- Page 195 and 196:
The Draper DistinguishedPerformance
- Page 197:
Educational Activitiesat Draper Lab