Our solution used a receiver that accepted an external frequencyreference, 1-pulse-per-second input (with an offset option tohandle latency), and trajectory aiding. Thus, we couldpotentially eliminate clock effects, tie down the rawmeasurements, turn pseudoranges and rates into ranges andrange-rates, and eliminate receiver tracking loop errors due todynamics. The aiding data allowed the receiver to average forsufficiently long times so as to exceed the quantization limits ofthe simulator without worrying about trajectory dynamics.Experimental MethodologyFigure 3 shows the experimental setup that was used todemonstrate the measurement of interchannel pseudorangeaccuracy for zero Doppler (stationary) cases.The GPS receiver accepted an external frequency input between10- and 50-MHz in 10-kHz increments, output rawmeasurements of prange, phase, and Doppler when tracking onlyone SV without having a GPS fix, and could be commanded tolook for only one SV. The simulator under test was programmedto generate a scenario with constant range, yet have data bits thatcontained consistent almanac and ephemeris parameters (so thatthe receiver data bit checks did not fail). We set up a multipathchannel that had a path delay of 50 cm or 1 mm. The 50-cmpath is used to ensure that we have no scale-factor errors in ourmeasurement and the 1-mm setting provided a nonzeromultipath value that was insignificant with respect to both theaccuracy or interchannel bias numbers with which we wereconcerned. (In general, the nonzero multipath valueaccommodates those cases where a simulator may not provide azero valued multipath delay.)For each test run, we started with the multipath channel off andthe primary channel on. Midway through the run, we switchedbetween the multipath and primary channel. We let thesimulator run for one day, and did a precision interchannel biasprange calibration (done at some fixed nonzero Doppler we cannot easily alter) just before taking data.We first did tests injecting the 50-cm offset. A perfect simulatorand locked clock scheme should easily show a 50-cm jump onC/A, L1-P, and L2-P. Interchannel bias errors would show up asdeviation from the desired 50-cm jump. We then repeated thetests injecting only a 1-mm multipath (the small nonzero value).Our goal was to determine whether the different simulatorchannels were matched to within 5-cm 1-sigma values, thespecification on the particular simulator being tested. Theexperiment was done on a single-channel pair; collecting formalspecification data would require testing all channels’ matchbetween C/A, L1-P, and L2-P, and repeating the tests to obtainstatistical significance.Using the off-the-shelf internal Phase Lock Loop (PLL)clock-lock option in our receiver, we were frequency locked tothe simulator to 0.001 m/s, resulting in a fractional frequencyerror of 1 part in 3.3e+12. (Fractional frequency error, or ∆f/f,times the speed of light is the equivalent velocity error.) WithPerfect scenario aiding requiredfor nonzero, high-value dopplers(future option)Scenario:legal databitsrange = const+slopedoppler = slopeRF out2 channels = 1 PPS SVCA, L1-PL2-PPVT and/or LOS aidingReceiver:slope=0 for all runsin this articleExt FreqOut1 PPS outExt Freq In1 PPS InSim ch1 direct signalSim ch2 multipath(2)(future option)Channel Gains(1) vs TimeRaw Measurements:Prange for CA, L1-P, L2-PPhase for CA, L1-P, L2-PDoppler for CA, L1-P, L2-Pch1 pair ch2 pair-160+10 dBWch2 pair ch1 pair -160-99 dBWMultipath delay = 50 cm or 1 mmNotes1): Each "channel" on the simulator's display was really an L1 and L2 channel pair.2): We used the simulator's external frequency output as opposed to a common Rbstandard driving both. The reason is that when the Rb 5 or 10-MHz reference goesinto the simulator, the simulator changes it to some other frequency, typically10.23 MHz, and this introduces additional frequency locking errors betweenthe simulator and receiver.Each channel is really a hardware pairso ch1 has a CA L1-P and L2-P counterpart.The simulator must internally calibrate ch1 CA to all othercounterparts and other channels.Figure 3. Channel accuracy and interchannel bias measurement setup.Validating the Validating Tool: Defining and Measuring GPS Simulator Specifications9
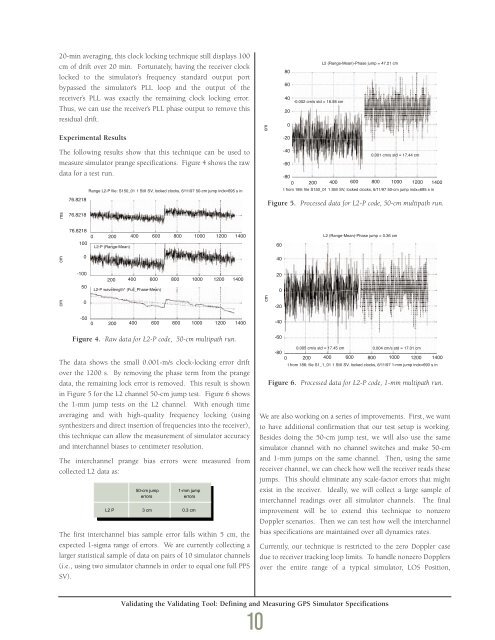
20-min averaging, this clock locking technique still displays 100cm of drift over 20 min. Fortunately, having the receiver clocklocked to the simulator’s frequency standard output portbypassed the simulator’s PLL loop and the output of thereceiver’s PLL was exactly the remaining clock locking error.Thus, we can use the receiver’s PLL phase output to remove thisresidual drift.Experimental ResultsThe following results show that this technique can be used tomeasure simulator prange specifications. Figure 4 shows the rawdata for a test run.Figure 5. Processed data for L2-P code, 50-cm multipath run.Figure 4. Raw data for L2-P code, 50-cm multipath run.The data shows the small 0.001-m/s clock-locking error driftover the 1200 s. By removing the phase term from the prangedata, the remaining lock error is removed. This result is shownin Figure 5 for the L2 channel 50-cm jump test. Figure 6 showsthe 1-mm jump tests on the L2 channel. With enough timeaveraging and with high-quality frequency locking (usingsynthesizers and direct insertion of frequencies into the receiver),this technique can allow the measurement of simulator accuracyand interchannel biases to centimeter resolution.The interchannel prange bias errors were measured fromcollected L2 data as:The first interchannel bias sample error falls within 5 cm, theexpected 1-sigma range of errors. We are currently collecting alarger statistical sample of data on pairs of 10 simulator channels(i.e., using two simulator channels in order to equal one full PPSSV).Figure 6. Processed data for L2-P code, 1-mm multipath run.We are also working on a series of improvements. First, we wantto have additional confirmation that our test setup is working.Besides doing the 50-cm jump test, we will also use the samesimulator channel with no channel switches and make 50-cmand 1-mm jumps on the same channel. Then, using the samereceiver channel, we can check how well the receiver reads thesejumps. This should eliminate any scale-factor errors that mightexist in the receiver. Ideally, we will collect a large sample ofinterchannel readings over all simulator channels. The finalimprovement will be to extend this technique to nonzeroDoppler scenarios. Then we can test how well the interchannelbias specifications are maintained over all dynamics rates.Currently, our technique is restricted to the zero Doppler casedue to receiver tracking loop limits. To handle nonzero Dopplersover the entire range of a typical simulator, LOS Position,Validating the Validating Tool: Defining and Measuring GPS Simulator Specifications10
- Page 2 and 3:
Letter from thePresident and CEO,Vi
- Page 4 and 5:
Information TechnologyMilton AdamsE
- Page 6 and 7:
BiographyMilton Adams has been at D
- Page 9 and 10:
Figure 1 represents a functional de
- Page 11 and 12:
Programs. In effect, these controll
- Page 13 and 14:
Although the terminal area traffic
- Page 15 and 16:
Table 2. ATFM performance evaluatio
- Page 17 and 18:
In the experiments, a nominal capac
- Page 19 and 20:
[3] Wambsganss, Michael C. “Colla
- Page 21 and 22:
Guidance, Navigation, and Control A
- Page 23 and 24:
A Control Lyapunov FunctionApproach
- Page 25 and 26:
x( 0) ∈ X and w(t) ∈Wfor all t
- Page 27 and 28:
(b) Select a quadratic RCLF V i (x)
- Page 29 and 30:
at each grid point. In the case w 1
- Page 31 and 32:
References[1] Ball, J.A. and A.J. v
- Page 33 and 34:
Guidance, Navigation, and Control A
- Page 35 and 36:
Relative and Differential GPSData T
- Page 37 and 38:
The first term on the right in the
- Page 39 and 40:
H R# δρ R,GPS -H A# δρ A,GPSThi
- Page 41 and 42:
selection; and (3) shown that the a
- Page 43 and 44:
Guidance, Navigation, and Control A
- Page 45 and 46:
Segmentation of MR ImagesUsing Curv
- Page 47 and 48:
(3)where ν now represents a contin
- Page 49 and 50:
Experimental ResultsThe results of
- Page 51 and 52:
Table 1. A summary of segmentation
- Page 53 and 54:
Guidance, Navigation,and ControlJim
- Page 55 and 56:
BiographyGeorge SchmidtGeorge Schmi
- Page 57 and 58:
clock and ephemeris errors, as well
- Page 59 and 60:
maintained in a rigid structure, wh
- Page 61 and 62:
Table 5. “Typical” absolute GPS
- Page 63 and 64:
performed, then the target location
- Page 65 and 66:
tightly-coupled system, however, ca
- Page 67 and 68:
Concluding RemarksRecent progress i
- Page 69 and 70:
As real-time systems evolve into th
- Page 71 and 72: Advanced Fault-TolerantComputing fo
- Page 73 and 74: The Viking and Voyager were both in
- Page 75 and 76: Containment Regions (FCRs). There a
- Page 77 and 78: well as reversing the whole process
- Page 79 and 80: As real-time systems evolve into th
- Page 81 and 82: Automated Station-Keepingfor Satell
- Page 83 and 84: Figure 2. Minimum elevation angles
- Page 85 and 86: anomaly M and/or the ascending node
- Page 87 and 88: However, since optimization and rec
- Page 89 and 90: is maintained in the Northern Hemis
- Page 91 and 92: autonomy. It must have the ability
- Page 93 and 94: [31] Neelon, Joseph G., Jr., Paul J
- Page 95 and 96: Draper’s primary goal is to Drape
- Page 97 and 98: )Rotordynamic Modelingof an Activel
- Page 99 and 100: Eq. (9) becomes:λ[ R ] { Φ } = [
- Page 101 and 102: chosen to be 24, for a total of 48
- Page 103 and 104: InertialInstruments/MechanicalDesig
- Page 105 and 106: BiographyJeffrey Borenstein is curr
- Page 107 and 108: process step. Process information i
- Page 109 and 110: Figure 4. Control chart for boron d
- Page 111 and 112: References[1] Barbour, N., J. Conne
- Page 113 and 114: Draper Laboratory continues to engi
- Page 115 and 116: Validating the Validating Tool:Defi
- Page 117 and 118: calculates miscellaneous terms, suc
- Page 119 and 120: Table 1. Suggested specification sh
- Page 121: User Accuracy as aFunction of Simul
- Page 125 and 126: Table 2. Sample high-level summary
- Page 127 and 128: AcknowledgmentR.L. Greenspan, J.A.
- Page 129 and 130: Systems IntegrationRich MartoranaPe
- Page 131 and 132: BiographyAnthony Kourepenis is an A
- Page 133 and 134: control is employed to maintain the
- Page 135 and 136: Table 1. Summary of automotive yaw
- Page 137 and 138: Resolution (60 Hz) deg/h10000000100
- Page 139 and 140: References[1] Greiff, P., B. Boxenh
- Page 141 and 142: Guidance, Navigation, and Control A
- Page 143 and 144: An Integrated Safety AnalysisMethod
- Page 145 and 146: Infrastructure ModelsSystemRequirem
- Page 147 and 148: Figures 6 and 7 illustrate the bloc
- Page 149 and 150: Notice that each flight track descr
- Page 151 and 152: Table 7. Safety statistics at 1700-
- Page 153 and 154: Guidance, Navigation, and Control A
- Page 155 and 156: An Optimal Guidance Law forPlanetar
- Page 157 and 158: Note that the states in the three d
- Page 159 and 160: Crossrange (Kft)10090807060504030Cl
- Page 161 and 162: The 1997 Charles StarkDraper PrizeT
- Page 163 and 164: The 1997 Charles StarkDraper Prize1
- Page 165 and 166: “Draper encourages its personnel
- Page 167 and 168: Gimballed Vibrating GyroscopeHaving
- Page 169 and 170: “Draper encourages its personnel
- Page 171 and 172: Optical Source Isolator withPolariz
- Page 173 and 174:
“Draper encourages its personnel
- Page 175 and 176:
Hunting Suppressor forPolyphase Ele
- Page 177 and 178:
“Draper encourages its personnel
- Page 179 and 180:
Sensor Having an Off-Frequency Driv
- Page 181 and 182:
proof mass from transients and enha
- Page 183 and 184:
1997 Published PapersThe following
- Page 185 and 186:
monitoring of space structures and
- Page 187 and 188:
measured by kinematic degrees of fr
- Page 189 and 190:
i.e., what percent of the earth’s
- Page 191 and 192:
McConley, M. W.; Dahleh, M. A.; Fer
- Page 193 and 194:
unaffordable, or even misguided. Bu
- Page 195 and 196:
The Draper DistinguishedPerformance
- Page 197:
Educational Activitiesat Draper Lab