

1998 - Draper Laboratory
1998 - Draper Laboratory
1998 - Draper Laboratory
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
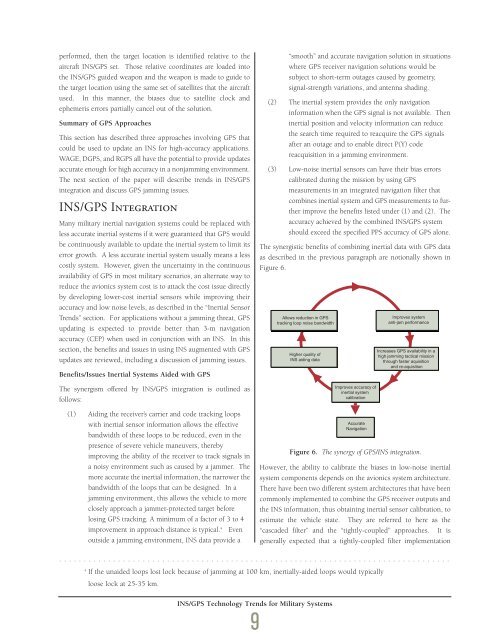
performed, then the target location is identified relative to theaircraft INS/GPS set. Those relative coordinates are loaded intothe INS/GPS guided weapon and the weapon is made to guide tothe target location using the same set of satellites that the aircraftused. In this manner, the biases due to satellite clock andephemeris errors partially cancel out of the solution.Summary of GPS ApproachesThis section has described three approaches involving GPS thatcould be used to update an INS for high-accuracy applications.WAGE, DGPS, and RGPS all have the potential to provide updatesaccurate enough for high accuracy in a nonjamming environment.The next section of the paper will describe trends in INS/GPSintegration and discuss GPS jamming issues.INS/GPS IntegrationMany military inertial navigation systems could be replaced withless accurate inertial systems if it were guaranteed that GPS wouldbe continuously available to update the inertial system to limit itserror growth. A less accurate inertial system usually means a lesscostly system. However, given the uncertainty in the continuousavailability of GPS in most military scenarios, an alternate way toreduce the avionics system cost is to attack the cost issue directlyby developing lower-cost inertial sensors while improving theiraccuracy and low noise levels, as described in the “Inertial SensorTrends” section. For applications without a jamming threat, GPSupdating is expected to provide better than 3-m navigationaccuracy (CEP) when used in conjunction with an INS. In thissection, the benefits and issues in using INS augmented with GPSupdates are reviewed, including a discussion of jamming issues.Benefits/Issues Inertial Systems Aided with GPSThe synergism offered by INS/GPS integration is outlined asfollows:(1) Aiding the receiver’s carrier and code tracking loopswith inertial sensor information allows the effectivebandwidth of these loops to be reduced, even in thepresence of severe vehicle maneuvers, therebyimproving the ability of the receiver to track signals ina noisy environment such as caused by a jammer. Themore accurate the inertial information, the narrower thebandwidth of the loops that can be designed. In ajamming environment, this allows the vehicle to moreclosely approach a jammer-protected target beforelosing GPS tracking. A minimum of a factor of 3 to 4improvement in approach distance is typical. 4 Evenoutside a jamming environment, INS data provide a“smooth” and accurate navigation solution in situationswhere GPS receiver navigation solutions would besubject to short-term outages caused by geometry,signal-strength variations, and antenna shading.(2) The inertial system provides the only navigationinformation when the GPS signal is not available. Theninertial position and velocity information can reducethe search time required to reacquire the GPS signalsafter an outage and to enable direct P(Y) codereacquisition in a jamming environment.(3) Low-noise inertial sensors can have their bias errorscalibrated during the mission by using GPSmeasurements in an integrated navigation filter thatcombines inertial system and GPS measurements to furtherimprove the benefits listed under (1) and (2). Theaccuracy achieved by the combined INS/GPS systemshould exceed the specified PPS accuracy of GPS alone.The synergistic benefits of combining inertial data with GPS dataas described in the previous paragraph are notionally shown inFigure 6.Allows reduction in GPStracking loop noise bandwidthHigher quality ofINS aiding dataImproves IMPROVES accuracy ACCURACY ofinertial OF INERTIAL systemSYSTEM calibration CALIBRATIONAccurateNavigationImproves systemanti-jam performanceIncreases GPS availability in ahigh jamming tactical missionthrough faster aquisitionand re-aquisitionFigure 6. The synergy of GPS/INS integration.However, the ability to calibrate the biases in low-noise inertialsystem components depends on the avionics system architecture.There have been two different system architectures that have beencommonly implemented to combine the GPS receiver outputs andthe INS information, thus obtaining inertial sensor calibration, toestimate the vehicle state. They are referred to here as the“cascaded filter” and the “tightly-coupled” approaches. It isgenerally expected that a tightly-coupled filter implementation................................................................................4If the unaided loops lost lock because of jamming at 100 km, inertially-aided loops would typicallyloose lock at 25-35 km.INS/GPS Technology Trends for Military Systems9













