

The Geometry of Ships

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
8 THE PRINCIPLES OF NAVAL ARCHITECTURE SERIES<br />
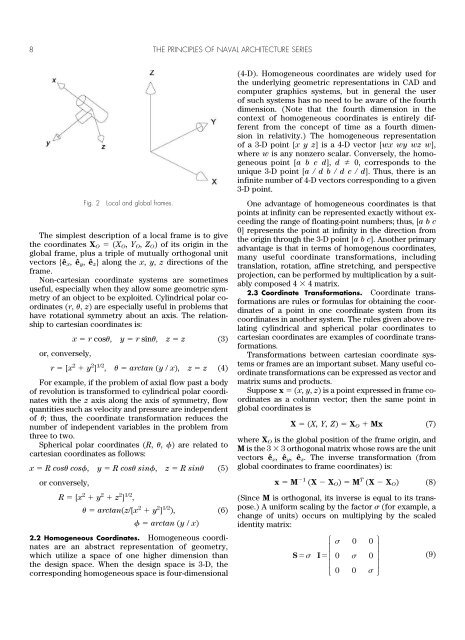
Fig. 2<br />
Local and global frames.<br />
<strong>The</strong> simplest description <strong>of</strong> a local frame is to give<br />
the coordinates X O (X O , Y O , Z O ) <strong>of</strong> its origin in the<br />
global frame, plus a triple <strong>of</strong> mutually orthogonal unit<br />
vectors {ê x , ê y , ê z } along the x, y, z directions <strong>of</strong> the<br />
frame.<br />
Non-cartesian coordinate systems are sometimes<br />
useful, especially when they allow some geometric symmetry<br />
<strong>of</strong> an object to be exploited. Cylindrical polar coordinates<br />
(r, , z) are especially useful in problems that<br />
have rotational symmetry about an axis. <strong>The</strong> relationship<br />
to cartesian coordinates is:<br />
x r cos, y r sin, z z (3)<br />
or, conversely,<br />
r [x 2 y 2 ] 1/2 , arctan (y / x), z z (4)<br />
For example, if the problem <strong>of</strong> axial flow past a body<br />
<strong>of</strong> revolution is transformed to cylindrical polar coordinates<br />
with the z axis along the axis <strong>of</strong> symmetry, flow<br />
quantities such as velocity and pressure are independent<br />
<strong>of</strong> ; thus, the coordinate transformation reduces the<br />
number <strong>of</strong> independent variables in the problem from<br />
three to two.<br />
Spherical polar coordinates (R, , ) are related to<br />
cartesian coordinates as follows:<br />
x R cos cos, y R cos sin, z R sin (5)<br />
or conversely,<br />
R [x 2 y 2 z 2 ] 1/2 ,<br />
arctan(z/[x 2 y 2 ] 1/2 ), (6)<br />
arctan (y / x)<br />
2.2 Homogeneous Coordinates. Homogeneous coordinates<br />
are an abstract representation <strong>of</strong> geometry,<br />
which utilize a space <strong>of</strong> one higher dimension than<br />
the design space. When the design space is 3-D, the<br />
corresponding homogeneous space is four-dimensional<br />
(4-D). Homogeneous coordinates are widely used for<br />
the underlying geometric representations in CAD and<br />
computer graphics systems, but in general the user<br />
<strong>of</strong> such systems has no need to be aware <strong>of</strong> the fourth<br />
dimension. (Note that the fourth dimension in the<br />
context <strong>of</strong> homogeneous coordinates is entirely different<br />
from the concept <strong>of</strong> time as a fourth dimension<br />
in relativity.) <strong>The</strong> homogeneous representation<br />
<strong>of</strong> a 3-D point [x y z] is a 4-D vector [wx wy wz w],<br />
where w is any nonzero scalar. Conversely, the homogeneous<br />
point [a b c d], d 0, corresponds to the<br />
unique 3-D point [a / d b / d c / d]. Thus, there is an<br />
infinite number <strong>of</strong> 4-D vectors corresponding to a given<br />
3-D point.<br />
One advantage <strong>of</strong> homogeneous coordinates is that<br />
points at infinity can be represented exactly without exceeding<br />
the range <strong>of</strong> floating-point numbers; thus, [a b c<br />
0] represents the point at infinity in the direction from<br />
the origin through the 3-D point [a b c]. Another primary<br />
advantage is that in terms <strong>of</strong> homogenous coordinates,<br />
many useful coordinate transformations, including<br />
translation, rotation, affine stretching, and perspective<br />
projection, can be performed by multiplication by a suitably<br />
composed 4 4 matrix.<br />
2.3 Coordinate Transformations. Coordinate transformations<br />
are rules or formulas for obtaining the coordinates<br />
<strong>of</strong> a point in one coordinate system from its<br />
coordinates in another system. <strong>The</strong> rules given above relating<br />
cylindrical and spherical polar coordinates to<br />
cartesian coordinates are examples <strong>of</strong> coordinate transformations.<br />
Transformations between cartesian coordinate systems<br />
or frames are an important subset. Many useful coordinate<br />
transformations can be expressed as vector and<br />
matrix sums and products.<br />
Suppose x (x, y, z) is a point expressed in frame coordinates<br />
as a column vector; then the same point in<br />
global coordinates is<br />
X (X, Y, Z) X O Mx (7)<br />
where X O is the global position <strong>of</strong> the frame origin, and<br />
M is the 3 3 orthogonal matrix whose rows are the unit<br />
vectors ê x , ê y , ê z . <strong>The</strong> inverse transformation (from<br />
global coordinates to frame coordinates) is:<br />
x M 1 (X X O ) M T (X X O ) (8)<br />
(Since M is orthogonal, its inverse is equal to its transpose.)<br />
A uniform scaling by the factor (for example, a<br />
change <strong>of</strong> units) occurs on multiplying by the scaled<br />
identity matrix:<br />
S<br />
⎧ 0 0 ⎫<br />
⎪<br />
⎪<br />
I⎪<br />
0 0 ⎪<br />
⎪<br />
⎪<br />
⎩ 0 0 ⎭<br />
(9)