

The Geometry of Ships

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
20 THE PRINCIPLES OF NAVAL ARCHITECTURE SERIES<br />
continuous derivatives <strong>of</strong> all orders. At the knotlines, the<br />
spans join with levels <strong>of</strong> continuity depending on the<br />
spline degree. Cubic spline surfaces have C 2 continuity<br />
across their knotlines, which is generally considered adequate<br />
continuity for all practical aesthetic and hydrodynamic<br />
purposes. Splines <strong>of</strong> lower order than cubic (i.e.,<br />
linear and quadratic) are simpler to apply and provide<br />
adequate continuity (C 0 and C 1 , respectively) for many<br />
less demanding applications.<br />
4.7 Interpolating Spline L<strong>of</strong>ted Surface. In Section<br />
3.5, we described interpolating spline curves which pass<br />
through an arbitrary set <strong>of</strong> data points. This curve construction<br />
can be the basis <strong>of</strong> a l<strong>of</strong>ted surface which interpolates<br />
an arbitrary set <strong>of</strong> parent curves, known as<br />
master curves or control curves. Suppose we have defined<br />
a set <strong>of</strong> curves X i (t), i 1, . . . N, e.g., the stem<br />
curve and some stations <strong>of</strong> a hull. <strong>The</strong> following rule produces<br />
a parametric surface definition which interpolates<br />
these master curves: Given u and v,<br />
• Evaluate each master curve at t u, resulting in the<br />
points X i (u), i 1, . . . N<br />
• Construct an interpolating spline S(t) passing through<br />
the points X i in sequence<br />
• Evaluate X(u, v) S(v).<br />
A little more has to be specified to make this construction<br />
definite: the order k <strong>of</strong> the interpolating spline, how<br />
its knots are determined (knots at the master curves are<br />
common), and the end conditions to be applied (Fig. 14).<br />
If the master curves X i are interpolating splines, this<br />
surface passes exactly through all its data points. Note<br />
that there do not have to be the same number <strong>of</strong> data<br />
points along each master curve, but the data points do<br />
have to be organized into rows or columns; they can’t<br />
just be scattered points. <strong>The</strong> smoothness <strong>of</strong> the resulting<br />
surface may not be acceptable unless the data itself is <strong>of</strong><br />
very high quality, e.g., sampled from a smooth surface,<br />
with a very low level <strong>of</strong> measurement error.<br />
4.8 B-spline L<strong>of</strong>ted Surface. In a similar construction,<br />
B-spline curves can be used instead <strong>of</strong> interpolating<br />
splines to create another form <strong>of</strong> l<strong>of</strong>ted surface. Again,<br />
we start with N master curves, but the construction is as<br />
follows: Given u and v,<br />
• Evaluate each master curve at t u, resulting in the<br />
points X i (u), i 1, . . . N<br />
• Construct a B-spline curve S(t) using the points X i in<br />
sequence as control points<br />
• Evaluate X(u, v) S(v).<br />
To be definite, we have to specify the order k <strong>of</strong> the B-<br />
spline, and its knots (which might just be uniform).<br />
<strong>The</strong> B-spline l<strong>of</strong>ted surface interpolates its first and<br />
last master curves but in general not the others (unless<br />
k 2). It behaves instead as if it is attracted to the interior<br />
master curves. It has the following additional<br />
useful properties, analogous to those <strong>of</strong> B-spline<br />
curves:<br />
• End tangency: At v 0, X(u, v) is tangent to the ruled<br />
surface between X 1 and X 2 ; likewise at v 1, X(u, v) is<br />
tangent to the ruled surface between the last two master<br />
curves. This property makes it easy to control the slopes<br />
in the v direction at the ends.<br />
• Straight section: If k or more consecutive master<br />
curves lie on a general cylinder (i.e., their projections<br />
on a plane normal to the cylinder generators are identical),<br />
a portion <strong>of</strong> the surface will lie accurately on that<br />
same cylinder.<br />
• Mesh velocity: <strong>The</strong> parametric velocity in the<br />
v-direction reflects the spacing <strong>of</strong> master curves, i.e., the<br />
velocity will be relatively low where master curves are<br />
close together.<br />
• Local control: When N k the influence <strong>of</strong> any one<br />
master curve will extend over a limited part <strong>of</strong> the surface<br />
in the v-direction (less than k knot spans).<br />
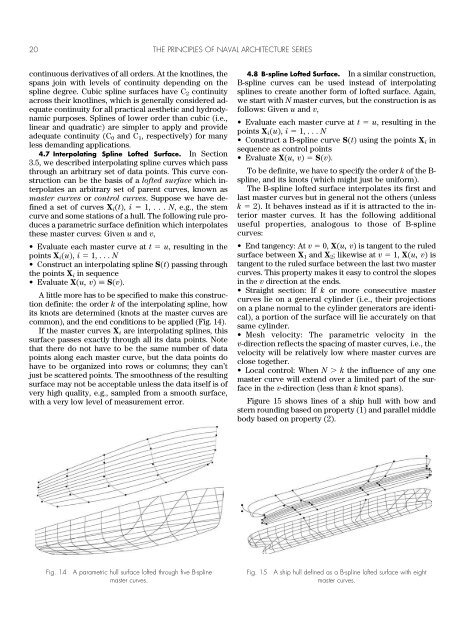
Figure 15 shows lines <strong>of</strong> a ship hull with bow and<br />
stern rounding based on property (1) and parallel middle<br />
body based on property (2).<br />
Fig. 14<br />
A parametric hull surface l<strong>of</strong>ted through five B-spline<br />
master curves.<br />
Fig. 15<br />
A ship hull defined as a B-spline l<strong>of</strong>ted surface with eight<br />
master curves.