

The Geometry of Ships

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
THE GEOMETRY OF SHIPS 43<br />
<strong>The</strong> general principles <strong>of</strong> weight prediction are wellknown.<br />
Weight is the product <strong>of</strong> mass times acceleration<br />
due to gravity, g. <strong>The</strong> total mass will be the sum <strong>of</strong><br />
all component masses, and the center <strong>of</strong> mass (or center<br />
<strong>of</strong> gravity) can be figured by accumulating x, y, z<br />
moments:<br />
(91)<br />
{M x<br />
,M y<br />
,M z<br />
} {x i<br />
,y i<br />
,z i<br />
}m i (92)<br />
i<br />
where m i is a component mass and {x i , y i , z i } is the location<br />
<strong>of</strong> its center <strong>of</strong> mass. <strong>The</strong> resultant center <strong>of</strong> mass<br />
(center <strong>of</strong> gravity) has coordinates<br />
{x G , y G , z G } {M x /m, M y /m, M z /m}. (93)<br />
In SI units, the mass units in naval architecture are<br />
typically kg for small craft, or metric tons for ships, and<br />
the term “weight estimate,” although widely used, is<br />
something <strong>of</strong> a misnomer. Weights, i.e., the forces exerted<br />
by gravity on these masses, are used in such applications<br />
as static equilibrium and stability analysis.<br />
In some situations, primarily in regard to dynamic<br />
analysis <strong>of</strong> maneuvering and motions in waves, the mass<br />
moments <strong>of</strong> inertia are also <strong>of</strong> importance. <strong>The</strong> total moments<br />
<strong>of</strong> inertia with respect to the global coordinates x,<br />
y, z are defined as follows:<br />
<br />
I<br />
<br />
I<br />
<br />
I<br />
<br />
I<br />
<br />
I<br />
m <br />
I xx<br />
[m i<br />
(y 2 i z2)(i ) ]<br />
i xx i<br />
I<br />
I yy<br />
[m i<br />
(z 2 i x2 i )(i yy ) i ]<br />
I zz<br />
[m i<br />
(x 2 i y2 i )(i zz ) i ]<br />
I xy<br />
I yx<br />
[m i<br />
x i<br />
y i<br />
(i xy<br />
) i<br />
]<br />
I yz<br />
I zy<br />
[m i<br />
y i<br />
z i<br />
(i yz<br />
) i<br />
]<br />
I zx<br />
I xz<br />
[m i<br />
z i<br />
x i<br />
(i zx<br />
) i<br />
]<br />
(94)<br />
(95)<br />
(96)<br />
(97)<br />
(98)<br />
(99)<br />
where m i is the mass <strong>of</strong> the ith item, and (i xx ) i , (i xy ) i ,<br />
etc., are its mass moments <strong>of</strong> inertia with respect to its<br />
own center <strong>of</strong> mass.<br />
<strong>The</strong> mass moments <strong>of</strong> inertia <strong>of</strong> the complete ship<br />
about its center <strong>of</strong> mass are obtained from the parallelaxis<br />
theorem. Let x, y, z be the centroidal coordinate<br />
frame parallel to the global coordinates, with origin at<br />
the center <strong>of</strong> mass, i.e., x x x G , etc. <strong>The</strong>n the components<br />
<strong>of</strong> mass moments <strong>of</strong> inertia with respect to the<br />
centroidal frame are:<br />
I xx I xx M (yG 2 zG) 2 (100)<br />
I yy I yy M (zG 2 xG) 2 (101)<br />
I zz I zz M (xG 2 yG) 2 (102)<br />
<br />
i<br />
m i<br />
I xy I xy M x G y G (103)<br />
I yz I yz M y G z G (104)<br />
I zx I zx M z G x G (105)<br />
<strong>The</strong> weight schedule is a table <strong>of</strong> weights, centroids,<br />
and moments arranged to facilitate the above calculations.<br />
Today it is most commonly maintained as a<br />
spreadsheet, with the tremendous advantage that its totals<br />
can be updated continuously as component<br />
weights are added and revised. Often it is useful to categorize<br />
weight components into groups, e.g., hull,<br />
propulsion, tanks, and cargo. Some 3-D modelers allow<br />
unit weights to be assigned to geometric elements, and<br />
will maintain a weight schedule that dynamically updates<br />
to reflect changes in geometry, as well as unit<br />
weights.<br />
Some component weights can be treated as points,<br />
e.g., an engine or an item <strong>of</strong> hardware. Some weights are<br />
distributed over curves and surfaces; their mass calculation<br />
has been outlined in Sections 3 and 4. Weights that<br />
are complex-shaped volumes or solids are generally the<br />
most difficult to evaluate; for example, ballast castings<br />
and tank contents. Here the general techniques <strong>of</strong> volume<br />
and centroid computation developed for hydrostatics<br />
can be brought to bear.<br />
Of course, the vessel can vary from the design during<br />
construction. <strong>The</strong> architect, builder, and owner/operator<br />
all have an interest in monitoring weights and center <strong>of</strong><br />
gravity throughout construction and outfitting so the<br />
flotation, stability, capacity, and performance requirements<br />
and objectives are met when the vessel is placed<br />
in service. Weight analysis and flotation calculations are<br />
an ongoing concern during operation <strong>of</strong> the vessel, too,<br />
as cargo and stores are loaded and unloaded. Often this<br />
is performed by on-board computer programs which<br />
contain a geometric description <strong>of</strong> the ship and its partitioning<br />
into cargo spaces and tanks.<br />
9.6 Hydrostatic Stability. Hydrostatic stability is the<br />
principal topic <strong>of</strong> Moore (2009) and Tagg (2009). Here<br />
we provide a brief introduction relating the subject to<br />
vessel geometry, and focusing primarily on an upright<br />
equilibrium attitude.<br />
Archimedes’ principle provides necessary and sufficient<br />
conditions for a floating object to be in equilibrium.<br />
However, further analysis is required to determine<br />
whether such an equilibrium is stable. <strong>The</strong><br />
general topic <strong>of</strong> stability <strong>of</strong> equilibrium examines<br />
whether, following a small disturbance that moves a<br />
given system away from equilibrium, the system tends<br />
to restore itself to equilibrium, or to move farther away<br />
from it.<br />
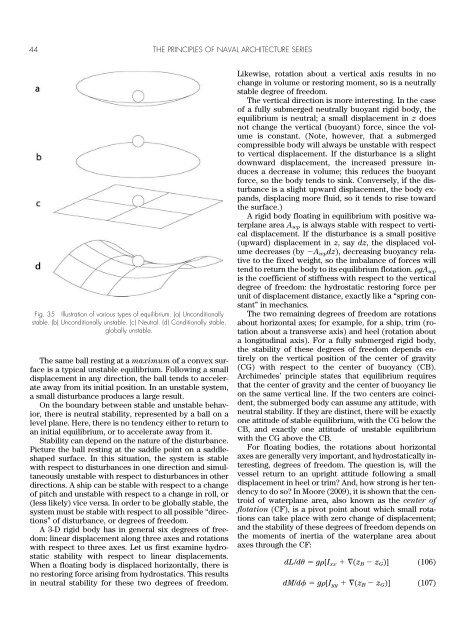
A ball resting at the low point <strong>of</strong> a concave surface is<br />
a prototype <strong>of</strong> stable equilibrium (Fig. 35). If the ball is<br />
pushed a little away from center, it tends to roll back. Its<br />
characteristic motion under this restoring force is an oscillation<br />
about the equilibrium position. Another way to<br />
characterize stable behavior is that a small disturbance<br />
produces small results.