TP simulation à l'aide du logiciel MATLAB - LASC
TP simulation à l'aide du logiciel MATLAB - LASC
TP simulation à l'aide du logiciel MATLAB - LASC
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
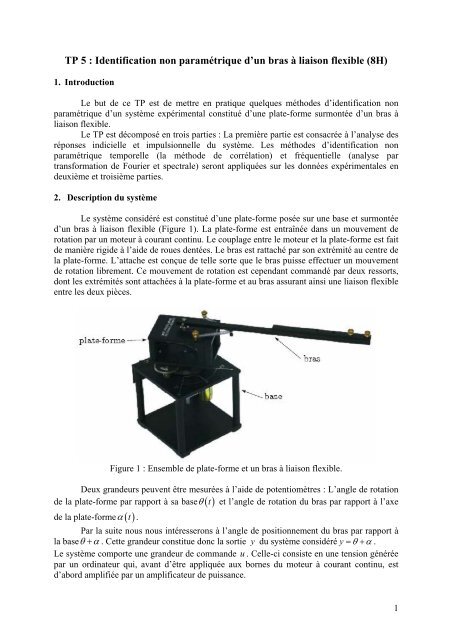
<strong>TP</strong> 5 : Identification non paramétrique d’un bras à liaison flexible (8H)1. Intro<strong>du</strong>ctionLe but de ce <strong>TP</strong> est de mettre en pratique quelques méthodes d’identification nonparamétrique d’un système expérimental constitué d’une plate-forme surmontée d’un bras àliaison flexible.Le <strong>TP</strong> est décomposé en trois parties : La première partie est consacrée à l’analyse desréponses indicielle et impulsionnelle <strong>du</strong> système. Les méthodes d’identification nonparamétrique temporelle (la méthode de corrélation) et fréquentielle (analyse partransformation de Fourier et spectrale) seront appliquées sur les données expérimentales endeuxième et troisième parties.2. Description <strong>du</strong> systèmeLe système considéré est constitué d’une plate-forme posée sur une base et surmontéed’un bras à liaison flexible (Figure 1). La plate-forme est entraînée dans un mouvement derotation par un moteur à courant continu. Le couplage entre le moteur et la plate-forme est faitde manière rigide à l’aide de roues dentées. Le bras est rattaché par son extrémité au centre dela plate-forme. L’attache est conçue de telle sorte que le bras puisse effectuer un mouvementde rotation librement. Ce mouvement de rotation est cependant commandé par deux ressorts,dont les extrémités sont attachées à la plate-forme et au bras assurant ainsi une liaison flexibleentre les deux pièces.Figure 1 : Ensemble de plate-forme et un bras à liaison flexible.Deux grandeurs peuvent être mesurées à l’aide de potentiomètres : L’angle de rotationθ t et l’angle de rotation <strong>du</strong> bras par rapport à l’axede la plate-forme par rapport à sa base ( )de la plate-forme α ( t).Par la suite nous nous intéresserons à l’angle de positionnement <strong>du</strong> bras par rapport àla baseθ + α . Cette grandeur constitue donc la sortie y <strong>du</strong> système considéré y = θ + α .Le système comporte une grandeur de commande u . Celle-ci consiste en une tension généréepar un ordinateur qui, avant d’être appliquée aux bornes <strong>du</strong> moteur à courant continu, estd’abord amplifiée par un amplificateur de puissance.1