TP simulation à l'aide du logiciel MATLAB - LASC
TP simulation à l'aide du logiciel MATLAB - LASC
TP simulation à l'aide du logiciel MATLAB - LASC
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
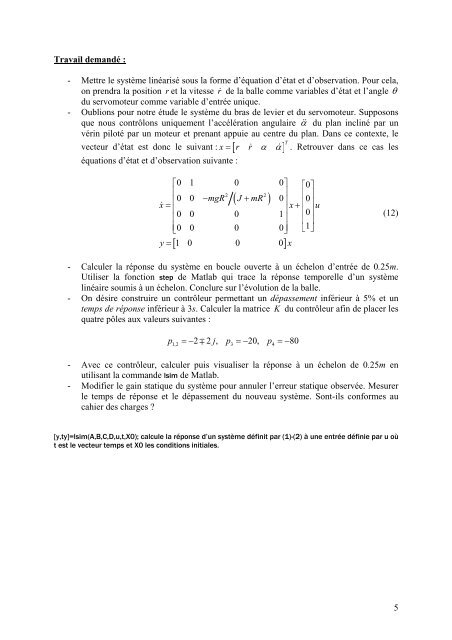
Travail demandé :- Mettre le système linéarisé sous la forme d’équation d’état et d’observation. Pour cela,on prendra la position r et la vitesse r de la balle comme variables d’état et l’angle θ<strong>du</strong> servomoteur comme variable d’entrée unique.- Oublions pour notre étude le système <strong>du</strong> bras de levier et <strong>du</strong> servomoteur. Supposonsque nous contrôlons uniquement l’accélération angulaire α <strong>du</strong> plan incliné par unvérin piloté par un moteur et prenant appuie au centre <strong>du</strong> plan. Dans ce contexte, levecteur d’état est donc le suivant : x = [ r rα α ] T. Retrouver dans ce cas leséquations d’état et d’observation suivante :⎡0 1 0 0⎤ ⎡0⎤⎢ 2 2 ⎥0 0 − mgR ( J + mR ) 0⎢0⎥x=⎢ ⎥x+⎢ ⎥ u⎢0 0 0 1⎥ ⎢0⎥⎢ ⎥ ⎢ ⎥⎢⎣0 0 0 0⎥⎦⎣1⎦y =x[ 1 0 0 0](12)- Calculer la réponse <strong>du</strong> système en boucle ouverte à un échelon d’entrée de 0.25m.Utiliser la fonction step de Matlab qui trace la réponse temporelle d’un systèmelinéaire soumis à un échelon. Conclure sur l’évolution de la balle.- On désire construire un contrôleur permettant un dépassement inférieur à 5% et untemps de réponse inférieur à 3s. Calculer la matrice K <strong>du</strong> contrôleur afin de placer lesquatre pôles aux valeurs suivantes :p =− 2∓2 j, p =− 20, p =−801,2 3 4- Avec ce contrôleur, calculer puis visualiser la réponse à un échelon de 0.25m enutilisant la commande lsim de Matlab.- Modifier le gain statique <strong>du</strong> système pour annuler l’erreur statique observée. Mesurerle temps de réponse et le dépassement <strong>du</strong> nouveau système. Sont-ils conformes aucahier des charges ?[y,ty]=lsim(A,B,C,D,u,t,X0); calcule la réponse d’un système définit par (1)-(2) à une entrée définie par u oùt est le vecteur temps et X0 les conditions initiales.5