AUTOINSIDE Édition 2 – Février 2019

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
NUMÉRISATION FOCUS<br />
Le radar établit une sorte de carte en relief. En plus de celle-ci, le<br />
lidar/laser détecte également les différences de couleur, ce qui permet<br />
d’établir une image tridimensionnelle et en couleur de l’environnement.<br />
Le radar s’avère limité dans ce domaine.<br />
La détection précise des objets par un système d’assistance à la<br />
conduite nécessite une association avec la caméra intérieure. Deux systèmes<br />
sont par conséquent actuellement à l’essai dans le secteur de<br />
la recherche : radar combiné à une caméra ou laser/lidar. Audi est le<br />
premier constructeur à intégrer un capteur de mesure laser à l’avant,<br />
sans toutefois, pour des raisons de sécurité, renoncer aux capteurs radar.<br />
La redondance garantit des résultats d’une grande précision. Deux<br />
capteurs scannent l’environnement de manière indépendante et un logiciel<br />
compare les résultats.<br />
Deep Learning<br />
La caméra avant est souvent combinée au radar pour la fusion des<br />
données et le contrôle de la plausibilité. Avec huit mégapixels, une résolution<br />
d’image supérieure et un angle de détection de 125 ° (angle<br />
azimutal), les futures caméras généreront, en combinaison avec les<br />
autres capteurs Continental, jusqu’à 4To de données par heure, qu’il faudra<br />
traiter. Pour y parvenir, les chercheurs et développeurs de Bosch,<br />
Continental et NVIDIA, entre autres, entraînent les véhicules dans des<br />
situations de circulation virtuelles. Le logiciel s’adapte automatiquement<br />
à la circulation et apprend à évaluer correctement les situations.<br />
Pour le sous-traitant Continental, la conduite dans des environnements<br />
virtuels est également une question de gain de temps. « Les<br />
ressources pour les tests de véhicules réels sont limitées et les tests<br />
virtuels fournissent aux développeurs des résultats rapides. Tandis<br />
qu’un véhicule réel peut parcourir près de 10 000 km par mois pour un<br />
test physique, les simulations virtuelles permettent actuellement des<br />
distances de 8000 km par heure. Ce chiffre va encore augmenter dans<br />
l’avenir », déclare Karl Haupt, responsable de la division Systèmes d’assistance<br />
à la conduite de Continental.<br />
Selon le Suisse Marc Stampfli, qui travaille depuis de longues années<br />
comme responsable commercial et numérique chez le fabricant<br />
de puces et de cartes graphiques, NVIDIA a deux ou trois longueurs<br />
d’avance sur ses concurrents dans ce domaine. « NVIDIA ne construit<br />
pas ses propres véhicules mais entend uniquement proposer une plateforme<br />
», ajoute-t-il, soulignant qu’une commande de l’entreprise est<br />
intégrée dans les modèles Audi haut de gamme. Le FEO choisit les<br />
capteurs qu’il souhaite installer et NVIDIA assure la simulation des<br />
tests et l’apprentissage du système.<br />
Quel capteur arrive en tête ?<br />
Difficile de répondre à cette question : en plus du capteur, le logiciel<br />
utilisé pour la détection de l’environnement est également essentiel.<br />
Et dans ce domaine, les FEO et les fournisseurs sont en compétition<br />
pour que les premières applications soient commercialisables lors de<br />
l’homologation des systèmes.<br />
Le suivi des véhicules, les diagnostics en cas de dysfonctionnements<br />
et le calibrage occuperont à l’avenir une place encore plus importante<br />
dans le quotidien du garage. Une formation solide, par exemple<br />
de diagnosticien d’automobiles dans le domaine de compétences Z3,<br />
constitue pour les garagistes un investissement d’avenir qui leur permettra<br />
de maîtriser des systèmes techniquement complexes. <<br />
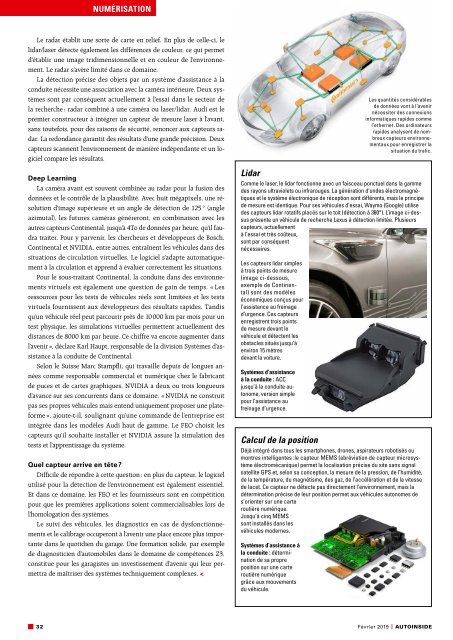
Lidar<br />
Comme le laser, le lidar fonctionne avec un faisceau ponctuel dans la gamme<br />
des rayons ultraviolets ou infrarouges. La génération d’ondes électromagnétiques<br />
et le système électronique de réception sont différents, mais le principe<br />
de mesure est identique. Pour ses véhicules d’essai, Waymo (Google) utilise<br />
des capteurs lidar rotatifs placés sur le toit (détection à 360°). L’image ci-dessus<br />
présente un véhicule de recherche Lexus à détection limitée. Plusieurs<br />
capteurs, actuellement<br />
à l’essai et très coûteux,<br />
sont par conséquent<br />
nécessaires.<br />
Les capteurs lidar simples<br />
à trois points de mesure<br />
(image ci-dessous,<br />
exemple de Continental)<br />
sont des modèles<br />
économiques conçus pour<br />
l’assistance au freinage<br />
d’urgence. Ces capteurs<br />
enregistrent trois points<br />
de mesure devant le<br />
véhicule et détectent les<br />
obstacles situés jusqu’à<br />
environ 15 mètres<br />
devant la voiture.<br />
Systèmes d’assistance<br />
à la conduite : ACC<br />
jusqu’à la conduite autonome,<br />
version simple<br />
pour l’assistance au<br />
freinage d’urgence.<br />
Calcul de la position<br />
Déjà intégré dans tous les smartphones, drones, aspirateurs robotisés ou<br />
montres intelligentes :le capteur MEMS (abréviation de capteur microsystème<br />
électromécanique) permet la localisation précise du site sans signal<br />
satellite GPS et, selon sa conception, la mesure de la pression, de l’humidité,<br />
de la température, du magnétisme, des gaz, de l’accélération et de la vitesse<br />
de lacet. Ce capteur ne détecte pas directement l’environnement, mais la<br />
détermination précise de leur position permet aux véhicules autonomes de<br />
s’orienter sur une carte<br />
routière numérique.<br />
Jusqu’à cinq MEMS<br />
sont installés dans les<br />
véhicules modernes.<br />
Systèmes d’assistance à<br />
la conduite : détermination<br />
de sa propre<br />
position sur une carte<br />
routière numérique<br />
grâce aux mouvements<br />
du véhicule.<br />
Les quantités considérables<br />
de données vont à l’avenir<br />
nécessiter des connexions<br />
informatiques rapides comme<br />
l’ethernet. Des ordinateurs<br />
rapides analysent de nombreux<br />
capteurs environnementaux<br />
pour enregistrer la<br />
situation du trafic.<br />
32<br />
<strong>Février</strong> <strong>2019</strong> | <strong>AUTOINSIDE</strong>