utbredning, lakvattenspridning och påverkan på omgivning - Sysav
utbredning, lakvattenspridning och påverkan på omgivning - Sysav
utbredning, lakvattenspridning och påverkan på omgivning - Sysav

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
esistivitetsmodell utifrån uppmätta data görs genom en inversionsprocess.<br />
I detta projekt används det automatiserade, cellbaserade, modelleringsprogrammet RES2DINV. I<br />
inversionsprocessen modifieras den antagna modellen, för en sann resistivitetsfördelning, iterativt i<br />
flera steg så att skillnaden mellan modellsvaret <strong>och</strong> de uppmätta värdena minskar. Alltså; målet är att<br />
om en resistivitetsundersökning skulle utföras i den skapade modellen, skulle samma mätdata som de i<br />
fält uppmätta erhållas (Loke 2003a).<br />
Inversionsprocessen börjar med att presentera de uppmätta resistivitetsvärdena i en pseudosektion. För<br />
att kunna modellera de komplicerade strukturerna <strong>och</strong> resistivitetsfördelningarna i marken används i<br />
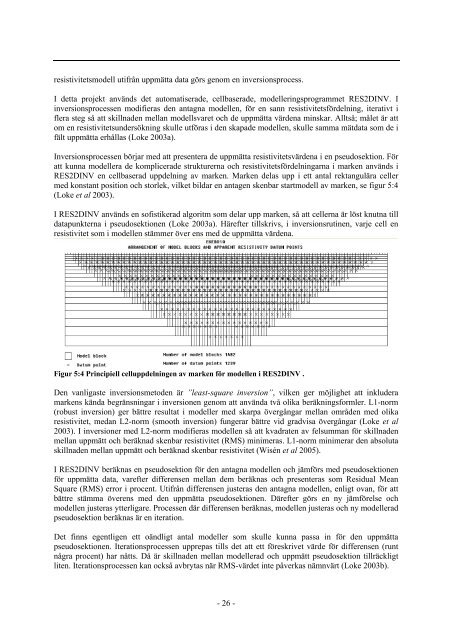
RES2DINV en cellbaserad uppdelning av marken. Marken delas upp i ett antal rektangulära celler<br />
med konstant position <strong>och</strong> storlek, vilket bildar en antagen skenbar startmodell av marken, se figur 5:4<br />
(Loke et al 2003).<br />
I RES2DINV används en sofistikerad algoritm som delar upp marken, så att cellerna är löst knutna till<br />
datapunkterna i pseudosektionen (Loke 2003a). Härefter tillskrivs, i inversionsrutinen, varje cell en<br />
resistivitet som i modellen stämmer över ens med de uppmätta värdena.<br />
Figur 5:4 Principiell celluppdelningen av marken för modellen i RES2DINV .<br />
Den vanligaste inversionsmetoden är ”least-square inversion”, vilken ger möjlighet att inkludera<br />
markens kända begränsningar i inversionen genom att använda två olika beräkningsformler. L1-norm<br />
(robust inversion) ger bättre resultat i modeller med skarpa övergångar mellan områden med olika<br />
resistivitet, medan L2-norm (smooth inversion) fungerar bättre vid gradvisa övergångar (Loke et al<br />
2003). I inversioner med L2-norm modifieras modellen så att kvadraten av felsumman för skillnaden<br />
mellan uppmätt <strong>och</strong> beräknad skenbar resistivitet (RMS) minimeras. L1-norm minimerar den absoluta<br />
skillnaden mellan uppmätt <strong>och</strong> beräknad skenbar resistivitet (Wisén et al 2005).<br />
I RES2DINV beräknas en pseudosektion för den antagna modellen <strong>och</strong> jämförs med pseudosektionen<br />
för uppmätta data, varefter differensen mellan dem beräknas <strong>och</strong> presenteras som Residual Mean<br />
Square (RMS) error i procent. Utifrån differensen justeras den antagna modellen, enligt ovan, för att<br />
bättre stämma överens med den uppmätta pseudosektionen. Därefter görs en ny jämförelse <strong>och</strong><br />
modellen justeras ytterligare. Processen där differensen beräknas, modellen justeras <strong>och</strong> ny modellerad<br />
pseudosektion beräknas är en iteration.<br />
Det finns egentligen ett oändligt antal modeller som skulle kunna passa in för den uppmätta<br />
pseudosektionen. Iterationsprocessen upprepas tills det att ett föreskrivet värde för differensen (runt<br />
några procent) har nåtts. Då är skillnaden mellan modellerad <strong>och</strong> uppmätt pseudosektion tillräckligt<br />
liten. Iterationsprocessen kan också avbrytas när RMS-värdet inte <strong>på</strong>verkas nämnvärt (Loke 2003b).<br />
- 26 -