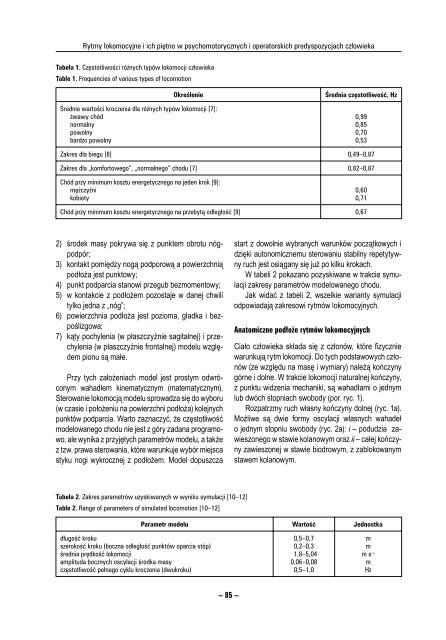
Janusz M. Morawskigicznych ma podłoże egzogeniczne [2]. Chodzi tu o rytmydobowe, miesięczne i roczne związane z obrotemdobowym Ziemi, a także z ruchem względnym Ziemi,Księżyca i Słońca.Niewątpliwie istnieje inna grupa rytmów biologicznycho zdecydowanie endogenicznym podłożu i na takichsię skoncentrujemy. Genezy rytmów endogenicznychmożna upatrywać w istnieniu pewnego biologicznegozegara wewnętrznego (chrononu). Istotne jest to,że pod pojęciem owego zegara biologicznego rozumiesię nie tyle środek do pomiaru bezwzględnego czasu,ile raczej czynnik rytmizujący. Bierze się pod uwagęnaturalne układy biologiczne, jak na przykład oscylatoryESSO (Endogenous Self-Sustaining OscillatoryClock), oparte na przemianie „DNA-RNA-proteina”,a także rytmy pracy serca, narządu oddechowego, niektóreokresowe procesy perystaltyczne i stomatogastryczne,zachodzące w jelitach. Za reprezentatywneprzykłady tej grupy biorytmów można również uznaćpewne cykliczności elementarnych pętli nerwowowomięśniowych(tremory, drżenia) [3].Ów zegar biologiczny może być wyobrażany takżejako ekwiwalent znanego i rozpoznanego w układach fizycznychoscylatora, opartego na sprzężeniu zwrotnym,z charakterystycznymi drganiami własnymi, cyklami granicznymi,oscylacjami relaksacyjnymi itp efektami.Wśród rytmów endogenicznych do najistotniejszychz punktu widzenia aktywności ruchowej człowiekanależą rytmy lokomocyjne [4]. Obecnośćrytmów lokomocyjnych ewidentnie potwierdzają jużbezpośrednie obserwacje sposobu, w jaki się człowiekporusza, chodząc czy biegając. Pasmo rytmówlokomocyjnych, pokrywające wszystkie rodzaje naturalnejlokomocji na dwóch kończynach, jest szacowanena 0,5–1,0 Hz.Podstawą rytmów lokomocyjnych mogą być procesyzachodzące w pętlach nerwowo-mięśniowych,ściśle powiązane z dynamiką (wymiarami i masą)członów ciała, wykorzystywanych w trakcie lokomocji,głównie kończyn dolnych i górnych oraz tułowia.Rytmy lokomocyjne świadczą o predyspozycjachczłowieka, ukształtowanych i utrwalonych w procesieewolucji gatunku, w trakcie opanowywania umiejętnościchodu na dwóch kończynach i utrzymywania pionowejpostawy ciała. Ale syndrom rytmów lokomocyjnychwykracza daleko poza struktury bezpośrednio odpowiedzialneza lokomocję i pionizację ciała, wywierającrównież piętno na innych, w tym pozalokomocyjnychzakresach działań współczesnego człowieka, takichchociażby jak sterowanie urządzeniami.Rytmy lokomocyjne są przez człowieka efektywniewykorzystywane dla usprawnienia motoryki wyrażanejczęsto w takich cechach (markerach), jak koordynacjaruchu, sprawność i precyzja wykonywania ruchuoraz w oszczędnościach kosztów energetycznych ruchu,niezależnie od zakresu świadomości angażowanejdla organizacji aktów ruchu ciała [5, 6].Produktami umiejętności wykorzystania rytmicznościsą rezonans i oscylacje parametryczne.Rezonans, wykorzystujący przemiany energii, sprzyjawzrostowi amplitudy oscylacji, w pewnym sensie oznaczapozyskiwanie maksymalnego skutku („ilości ruchu”)przy minimum przyczyny (oddziaływań zewnętrznych).Oscylacje parametryczne stanowią doskonałenarzędzie wzbudzenia i podtrzymania rezonansuw przypadkach braku wymuszeń zewnętrznych i w tymzrozumieniu sprzyjają pojawieniu się rezonansu parametrycznego.Nadmieńmy, że wymienione efekty są głęboko zakorzenione(chociaż nie zawsze w pełni uświadamiane)w psychomotoryce człowieka. Opis tych efektówza pomocą aparatu formalnego fizyki nie przedstawiatrudności, aczkolwiek dla niektórych adresatów pracynielegitymujących się głębszym przygotowaniemteoretycznym (zawodników i trenerów, rehabilitantówi pacjentów), może być mało przekonujący. Staraniemautora jest przeto, na ile to możliwe, zastąpienie wywodówformalnych, gdzie to tylko okazuje się możliwym,odniesieniami do intuicji i praktycznego doświadczeniaCzytelnika.Rytmy lokomocyjneCzęstotliwość kroczenia dla różnych typów lokomocjiprzedstawiono w tabeli 1. Jest znamienne, że wszystkieczęstotliwości zamieszczone w tabeli 1, bez względuna typ (chód, bieg, marsz) grupują się w stosunkowowąskim paśmie częstotliwości 0,5–1,0 Hz. Ten charakterystycznyzakres częstotliwości określamy jako rytmylokomocyjne 1 ,Począwszy od lat sześćdziesiątych XX w. badaniachodu in vivo uzupełniane są eksperymentem modelowym.Prosty model tego procesu był przedmiotembadań własnych autora [10–12] przy następujących założeniach:1) cała masa ciała jest skoncentrowana w jednympunkcie – środku masy ciała;1Pod terminem „rytm lokomocyjny” (częstotliwość kroczenia) rozumiesię regularnie powtarzany w czasie pełny cykl pracy kończyny dolnej w chodzie,obejmujący fazę podporową i fazę odciążenia– 84 –
Rytmy lokomocyjne i ich piętno w psychomotorycznych i operatorskich predyspozycjach człowiekaTabela 1. Częstotliwości różnych typów lokomocji człowiekaTable 1. Frequencies of various types of locomotionOkreślenieŚrednie wartości kroczenia dla różnych typów lokomocji [7]:żwawy chódnormalnypowolnybardzo powolnyŚrednia częstotliwość, Hz0,990,850,700,53Zakres dla biegu [8] 0,49–0,87Zakres dla „komfortowego”, „normalnego” chodu [7] 0,82–0,87Chód przy minimum kosztu energetycznego na jeden krok [9]:mężczyźnikobiety0,600,71Chód przy minimum kosztu energetycznego na przebytą odległość [9] 0,672) środek masy pokrywa się z punktem obrotu nógpodpór;3) kontakt pomiędzy nogą podporową a powierzchniąpodłoża jest punktowy;4) punkt podparcia stanowi przegub bezmomentowy;5) w kontakcie z podłożem pozostaje w danej chwilitylko jedna z „nóg”;6) powierzchnia podłoża jest pozioma, gładka i bezpoślizgowa;7) kąty pochylenia (w płaszczyźnie sagitalnej) i przechylenia(w płaszczyźnie frontalnej) modelu względempionu są małe.Przy tych założeniach model jest prostym odwróconymwahadłem kinematycznym (matematycznym).Sterowanie lokomocją modelu sprowadza się do wyboru(w czasie i położeniu na powierzchni podłoża) kolejnychpunktów podparcia. Warto zaznaczyć, że częstotliwośćmodelowanego chodu nie jest z góry zadana programowo,ale wynika z przyjętych parametrów modelu, a takżez tzw. prawa sterowania, które warunkuje wybór miejscastyku nogi wykrocznej z podłożem. Model dopuszczastart z dowolnie wybranych warunków początkowych idzięki autonomicznemu sterowaniu stabilny repetytywnyruch jest osiągany się już po kilku krokach.W tabeli 2 pokazano pozyskiwane w trakcie symulacjizakresy parametrów modelowanego chodu.Jak widać z tabeli 2, wszelkie warianty symulacjiodpowiadają zakresowi rytmów lokomocyjnych.Anatomiczne podłoże rytmów lokomocyjnychCiało człowieka składa się z członów, które fizyczniewarunkują rytm lokomocji. Do tych podstawowych członów(ze względu na masę i wymiary) należą kończynygórne i dolne. W trakcie lokomocji naturalnej kończyny,z punktu widzenia mechaniki, są wahadłami o jednymlub dwóch stopniach swobody (por. ryc. 1).Rozpatrzmy ruch własny kończyny dolnej (ryc. 1a).Możliwe są dwie formy oscylacji własnych wahadeło jednym stopniu swobody (ryc. 2a): i – podudzia zawieszonegow stawie kolanowym oraz ii – całej kończynyzawieszonej w stawie biodrowym, z zablokowanymstawem kolanowym.Tabela 2. Zakres parametrów uzyskiwanych w wyniku symulacji [10–12]Table 2. Range of parameters of simulated locomotion [10–12]Parametr modelu Wartość Jednostkadługość krokuszerokość kroku (boczna odległość punktów oparcia stóp)średnia prędkość lokomocjiamplituda bocznych oscylacji środka masyczęstotliwość pełnego cyklu kroczenia (dwukroku)0,5–0,70,2–0,31,8–5,040,06–0,080,5–1,0mmm s –1mHz– 85 –
- Page 1 and 2:
KOMITET REHABILITACJI, KULTURY FIZY
- Page 3 and 4:
ANTROPOMOTORYKAISSN 1731-0652KOMITE
- Page 5 and 6:
NR 46 AN TRO PO MO TO RY KA2009SPIS
- Page 7 and 8:
NR 46 AN TRO PO MO TO RY KA2009OD R
- Page 9:
Od Redakcjitody trafności testu wy
- Page 12 and 13:
Informacje dla autorówscripts sub
- Page 14 and 15:
Information for the AuthorsExamples
- Page 17 and 18:
NR 46 AN TRO PO MO TO RY KA2009THE
- Page 19 and 20:
The study of physical activity on B
- Page 21 and 22:
The study of physical activity on B
- Page 23 and 24:
The study of physical activity on B
- Page 25 and 26:
The study of physical activity on B
- Page 27:
The study of physical activity on B
- Page 30 and 31:
Władysław Machnacz, Andrzej Dudko
- Page 32 and 33:
Władysław Machnacz, Andrzej Dudko
- Page 34 and 35: Władysław Machnacz, Andrzej Dudko
- Page 36 and 37: Mirosław Mrozkowiaktions; this is
- Page 38 and 39: Mirosław MrozkowiakTabela 1.Objaś
- Page 40 and 41: Mirosław MrozkowiakPowierzchnia st
- Page 42 and 43: Marzena Paruzel-Dyja, Janusz IskraR
- Page 44 and 45: Marzena Paruzel-Dyja, Janusz IskraT
- Page 46 and 47: Marzena Paruzel-Dyja, Janusz Iskraw
- Page 48 and 49: Anna DemuthTherefore, obtained resu
- Page 50 and 51: Anna DemuthTabela 2. Odsetek osób
- Page 52 and 53: Anna DemuthTabela 4. Aktywność fi
- Page 55 and 56: NR 46 AN TRO PO MO TO RY KA2009PRÓ
- Page 57 and 58: Próba opracowania metody trafnośc
- Page 59 and 60: Próba opracowania metody trafnośc
- Page 61 and 62: Próba opracowania metody trafnośc
- Page 63: Próba opracowania metody trafnośc
- Page 66 and 67: Edward Mleczko, Jerzy JanuszewskiRe
- Page 68 and 69: Edward Mleczko, Jerzy Januszewskikr
- Page 70 and 71: Edward Mleczko, Jerzy Januszewskicz
- Page 72 and 73: Edward Mleczko, Jerzy Januszewski
- Page 74 and 75: Edward Mleczko, Jerzy JanuszewskiTa
- Page 76 and 77: Edward Mleczko, Jerzy Januszewskimo
- Page 78 and 79: Edward Mleczko, Jerzy Januszewskizw
- Page 81: PRACE PRZEGLĄDOWEREVIEW PAPERS
- Page 86 and 87: Janusz M. Morawskikolanowym, 0 2. D
- Page 88 and 89: Janusz M. Morawskistatystycznie w f
- Page 90 and 91: Janusz M. MorawskiRyc. 5. Przebiegi
- Page 92 and 93: Janusz M. MorawskiRyc. 11. Krzywa k
- Page 94 and 95: Janusz M. MorawskiRyc. 13. Prosty u
- Page 96 and 97: Janusz M. MorawskiRyc. 17. Tłumien
- Page 98 and 99: Janusz M. Morawskion dotyczyć tak
- Page 101 and 102: NR 46 AN TRO PO MO TO RY KA2009PRZE
- Page 103 and 104: Przegląd prac szkoły Profesora Pe
- Page 105 and 106: Przegląd prac szkoły Profesora Pe
- Page 107 and 108: Przegląd prac szkoły Profesora Pe
- Page 109 and 110: Przegląd prac szkoły Profesora Pe
- Page 111 and 112: Przegląd prac szkoły Profesora Pe
- Page 113: POLEMIKI I DYSKUSJEDISCUSSIONS
- Page 116 and 117: Wacław Petryńskireprezentatywnej.
- Page 118 and 119: Wacław PetryńskiJak wynika ze wsp
- Page 120 and 121: Józef Drabiknych, biochemicznych i
- Page 122 and 123: Józef Drabikjęcia w tytule), trze
- Page 125: RECENZJEREVIEWS
- Page 128 and 129: Zbigniew Czajkowskiziom światowy i
- Page 130 and 131: Zbigniew Czajkowskiścią na podsta
- Page 132 and 133: Zbigniew CzajkowskiTyszlera, Lwa Ku
- Page 135:
NR 46 AN TRO PO MO TO RY KA2009KONK



![Antropomotoryka nr 57 [2012]. - Akademia Wychowania Fizycznego ...](https://img.yumpu.com/50213388/1/182x260/antropomotoryka-nr-57-2012-akademia-wychowania-fizycznego-.jpg?quality=85)