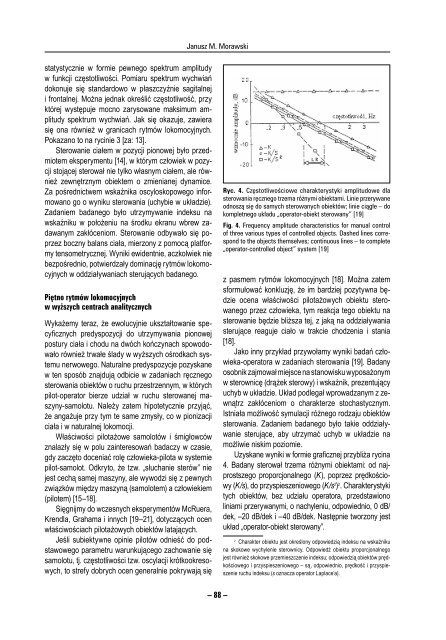
Janusz M. Morawskistatystycznie w formie pewnego spektrum amplitudyw funkcji częstotliwości. Pomiaru spektrum wychwiańdokonuje się standardowo w płaszczyźnie sagitalneji frontalnej. Można jednak określić częstotliwość, przyktórej występuje mocno zarysowane maksimum amplitudyspektrum wychwiań. Jak się okazuje, zawierasię ona również w granicach rytmów lokomocyjnych.Pokazano to na rycinie 3 [za: 13].Sterowanie ciałem w pozycji pionowej było przedmiotemeksperymentu [14], w którym człowiek w pozycjistojącej sterował nie tylko własnym ciałem, ale równieżzewnętrznym obiektem o zmienianej dynamice.Za pośrednictwem wskaźnika oscyloskopowego informowanogo o wyniku sterowania (uchybie w układzie).Zadaniem badanego było utrzymywanie indeksu nawskaźniku w położeniu na środku ekranu wbrew zadawanymzakłóceniom. Sterowanie odbywało się poprzezboczny balans ciała, mierzony z pomocą platformytensometrycznej. Wyniki ewidentnie, aczkolwiek niebezpośrednio, potwierdzały dominację rytmów lokomocyjnychw oddziaływaniach sterujących badanego.Piętno rytmów lokomocyjnychw wyższych centrach analitycznychWykażemy teraz, że ewolucyjnie ukształtowanie specyficznychpredyspozycji do utrzymywania pionowejpostury ciała i chodu na dwóch kończynach spowodowałorównież trwałe ślady w wyższych ośrodkach systemunerwowego. Naturalne predyspozycje pozyskanew ten sposób znajdują odbicie w zadaniach ręcznegosterowania obiektów o ruchu przestrzennym, w którychpilot-operator bierze udział w ruchu sterowanej maszyny-samolotu.Należy zatem hipotetycznie przyjąć,że angażuje przy tym te same zmysły, co w pionizacjiciała i w naturalnej lokomocji.Właściwości pilotażowe samolotów i śmigłowcówznalazły się w polu zainteresowań badaczy w czasie,gdy zaczęto doceniać rolę człowieka-pilota w systemiepilot-samolot. Odkryto, że tzw. „słuchanie sterów” niejest cechą samej maszyny, ale wywodzi się z pewnychzwiązków między maszyną (samolotem) a człowiekiem(pilotem) [15–18].Sięgnijmy do wczesnych eksperymentów McRuera,Krendla, Grahama i innych [19–21], dotyczących ocenwłaściwościach pilotażowych obiektów latających.Jeśli subiektywne opinie pilotów odnieść do podstawowegoparametru warunkującego zachowanie sięsamolotu, tj. częstotliwości tzw. oscylacji krótkookresowych,to strefy dobrych ocen generalnie pokrywają sięRyc. 4. Częstotliwościowe charakterystyki amplitudowe dlasterowania ręcznego trzema różnymi obiektami. Linie przerywaneodnoszą się do samych sterowanych obiektów; linie ciągłe – dokompletnego układu „operator-obiekt sterowany” [19]Fig. 4. Frequency amplitude characteristics for manual controlof three various types of controlled objects. Dashed lines correspondto the objects themselves; continuous lines – to complete„operator-controlled object” system [19]z pasmem rytmów lokomocyjnych [18]. Można zatemsformułować konkluzję, że im bardziej pozytywna będzieocena właściwości pilotażowych obiektu sterowanegoprzez człowieka, tym reakcja tego obiektu nasterowanie będzie bliższa tej, z jaką na oddziaływaniasterujące reaguje ciało w trakcie chodzenia i stania[18].Jako inny przykład przywołamy wyniki badań człowieka-operatoraw zadaniach sterowania [19]. Badanyosobnik zajmował miejsce na stanowisku wyposażonymw sterownicę (drążek sterowy) i wskaźnik, prezentującyuchyb w układzie. Układ podlegał wprowadzanym z zewnątrzzakłóceniom o charakterze stochastycznym.Istniała możliwość symulacji różnego rodzaju obiektówsterowania. Zadaniem badanego było takie oddziaływaniesterujące, aby utrzymać uchyb w układzie namożliwie niskim poziomie.Uzyskane wyniki w formie graficznej przybliża rycina4. Badany sterował trzema różnymi obiektami: od najprostszegoproporcjonalnego (K), poprzez prędkościowy(K/s), do przyspieszeniowego (K/s 2 ) 2 . Charakterystykitych obiektów, bez udziału operatora, przedstawionoliniami przerywanymi, o nachyleniu, odpowiednio, 0 dB/dek, –20 dB/dek i –40 dB/dek. Następnie tworzony jestukład „operator-obiekt sterowany”.2Charakter obiektu jest określony odpowiedzią indeksu na wskaźnikuna skokowe wychylenie sterownicy. Odpowiedź obiektu proporcjonalnegojest również skokowe przemieszczenie indeksu; odpowiedzią obiektów prędkościowegoi przyspieszeniowego – są, odpowiednio, prędkość i przyspieszenieruchu indeksu (s oznacza operator Laplace’a).– 88 –
Rytmy lokomocyjne i ich piętno w psychomotorycznych i operatorskich predyspozycjach człowiekaDziałanie operatora skutkuje w dwójnasób. Popierwsze usiłuje on w pierwszej kolejności „unormować”układ, tak dopasowując wnoszony przez siebiesposób sterowania, aby skompensować zmiany obiektusterowanego. W rezultacie tych działań kompensacyjnychuzyskiwany jest zbliżony (bez względu na różnicesterowanych obiektów) przebieg charakterystykamplitudowych całego układu: ich równoległy przebiegi nachylenie –20 dB/dek w rejonie tzw. częstotliwościodcięcia 3 . Świadczy o tym ujednolicony przebieg charakterystykczęstotliwościowych kompletnego układu„człowiek-obiekt sterowany” (linie ciągłe na ryc. 4)w pobliżu częstotliwości odcięcia.Po drugie, stwierdzamy, że człowiek-operator starasię – i to ma dla nas podstawowe znaczenie – sprowadzićczęstotliwość odcięcia układu w rejon rytmówlokomocyjnych (LR). Znajduje to następujące wytłumaczenie.Człowiek-operator preferuje w sterowaniuukład, który odpowiada na jego oddziaływania z określonąszybkością, zbliżoną do tej, z jaką na siły mięśnireaguje ciało ludzkie.Należy zwrócić uwagę na jeszcze jeden fakt: stanowiskobadawcze, w którym znajdował się operator byłonieruchome, co wykluczało wykorzystywanie przezbadanego bodźców czucia ruchowego. Znaczy to, żewrażliwość człowieka na efekt rytmów lokomocyjnychtkwi głęboko poza czuciową sferą psychomotorykii znajduje swe odbicie także w wyższych centrach systemunerwowego.RezonansZjawisko rezonansu opisuje się zwykle jako szybkiwzrost amplitudy drgań układu fizycznego, gdy częstotliwośćzewnętrznych okresowych wymuszeń jestzbliżona do częstotliwości tzw. drgań własnych układu[22]: Efekt rezonansu oznacza zatem maksimum skutku(amplitudy oscylacji) przy minimum przyczyny (oddziaływaniazewnętrznego).Jeśli układ, skłonny do drgań o częstotliwości własnejf 0, poddany zostanie cyklicznemu wymuszeniu fo częstotliwości bliskiej f 0, to mogą zaistnieć warunkipojawienia się rezonansu. Przypadek, kiedy częstotliwośćwymuszenia f jest dokładnie równa f 0, nazwiemykrytycznym. Przypadki, kiedy f < f 0, lub f > f 0, określimy,3Częstotliwość odcięcia jest określana w teorii sterowania jako częstotliwość,przy której rzędna charakterystyki amplitudowej (zależności„wzmocnienia” od częstotliwości) osiąga wartość 0 dB (wzmocnienie równe1). Częstotliwość odcięcia decyduje o jakości sterowania, głównie szybkościdziałania i stabilności układu.odpowiednio, jako pod- i nadkrytyczny. Nadmieńmy,że jedynie przy wymuszeniu krytycznym następujepełna przemiana energii potencjalnej, E pw kinetycznąE ki vice versa. Wtedy energia całkowita, E t= E p+ E k,pozostaje stała. W przypadku wymuszenia podkrytycznego,w wyrażeniu na E tdominuje składnik E p; przy wymuszeniunadkrytycznym – składnikiem dominującymjest E k. Obserwacja przebiegów zmian czasowych E p,E ki E tsugeruje zatem prosty sposób analizy (rozpoznawania)zjawisk rezonansowych.Badaniem przebiegów zmian energii mechanicznejw cyklu chodu człowieka zajmowali się dwaj biomechanicywłoscy: G.A. Cavagna i R. Margaria [23]. Na mocyanalizy kinematograficznej oznaczano położenie i ruchśrodka masy ciała. Z tych wartości wyznaczano energiępotencjalną E pi kinetyczną E kciała. Energia potencjalnaE pbyła wyliczana z pionowych zmian położeniaśrodka masy ciała. Energia kinetyczna E kjest wyliczanajako iloczyn masy i kwadratu prędkości środka masyciała w kierunku poziomym. Sumą obydwu składowychenergii jest energia całkowita E t. Każda forma energiima swój charakterystyczny przebieg zmiennościw czasie.Na rycinach 5–7 pokazano przykładowe przebiegizmian E p, E ki E tw pełnym cyklu kroczenia 4 . Rycina 5odnosi się do powolnego kroczenia w warunkach podkrytycznych.W warunkach podkrytycznych na przebiegczasowy E tdecydujący wpływ ma E p(kształt przebieguE tupodabnia się do przebiegu E p). Na rycinie 6 pokazanoprzebiegi energii dla szybkiego kroczenia (warunkinadkrytyczne). W kształcie przebiegu E tdominuje przebiegE k. Rycina 7 odnosi się do przypadku krytycznego;widzimy, że zmiany energii potencjalnej E pkompensujązmiany energii kinetycznej E k. Znaczy to, że występujeprawie pełna przemiana energii potencjalnej w kinetycznąi odwrotnie. Świadczy o tym przebieg energii całkowitejE t, która pozostaje prawie stała (drobne fluktuacjespowodowane przez czynniki drugorzędne). Wskazujeto na występowanie efektu rezonansu.Na rycinie 8 pokazano, dla porównania, przebiegiE p, E ki E tdla idealnego przypadku ruchu rezonansowegowahadła. Jak widać obrazy na rycinach 7 i 8 sąbardzo podobne. Całe ciało kroczącego człowieka zachowujesię w sposób podobny do wahadła.Chociaż cytowani autorzy nie odnoszą się expressisverbis do rezonansu, pozyskane wyniki ewidentnieświadczą o występowaniu tego efektu.4Na osiach pionowych wykresów odmierzana jest praca, której skalinie uwidoczniono, ponieważ dla naszych celów istotny jest sam przebiegkrzywych.– 89 –
- Page 1 and 2:
KOMITET REHABILITACJI, KULTURY FIZY
- Page 3 and 4:
ANTROPOMOTORYKAISSN 1731-0652KOMITE
- Page 5 and 6:
NR 46 AN TRO PO MO TO RY KA2009SPIS
- Page 7 and 8:
NR 46 AN TRO PO MO TO RY KA2009OD R
- Page 9:
Od Redakcjitody trafności testu wy
- Page 12 and 13:
Informacje dla autorówscripts sub
- Page 14 and 15:
Information for the AuthorsExamples
- Page 17 and 18:
NR 46 AN TRO PO MO TO RY KA2009THE
- Page 19 and 20:
The study of physical activity on B
- Page 21 and 22:
The study of physical activity on B
- Page 23 and 24:
The study of physical activity on B
- Page 25 and 26:
The study of physical activity on B
- Page 27:
The study of physical activity on B
- Page 30 and 31:
Władysław Machnacz, Andrzej Dudko
- Page 32 and 33:
Władysław Machnacz, Andrzej Dudko
- Page 34 and 35:
Władysław Machnacz, Andrzej Dudko
- Page 36 and 37:
Mirosław Mrozkowiaktions; this is
- Page 38 and 39: Mirosław MrozkowiakTabela 1.Objaś
- Page 40 and 41: Mirosław MrozkowiakPowierzchnia st
- Page 42 and 43: Marzena Paruzel-Dyja, Janusz IskraR
- Page 44 and 45: Marzena Paruzel-Dyja, Janusz IskraT
- Page 46 and 47: Marzena Paruzel-Dyja, Janusz Iskraw
- Page 48 and 49: Anna DemuthTherefore, obtained resu
- Page 50 and 51: Anna DemuthTabela 2. Odsetek osób
- Page 52 and 53: Anna DemuthTabela 4. Aktywność fi
- Page 55 and 56: NR 46 AN TRO PO MO TO RY KA2009PRÓ
- Page 57 and 58: Próba opracowania metody trafnośc
- Page 59 and 60: Próba opracowania metody trafnośc
- Page 61 and 62: Próba opracowania metody trafnośc
- Page 63: Próba opracowania metody trafnośc
- Page 66 and 67: Edward Mleczko, Jerzy JanuszewskiRe
- Page 68 and 69: Edward Mleczko, Jerzy Januszewskikr
- Page 70 and 71: Edward Mleczko, Jerzy Januszewskicz
- Page 72 and 73: Edward Mleczko, Jerzy Januszewski
- Page 74 and 75: Edward Mleczko, Jerzy JanuszewskiTa
- Page 76 and 77: Edward Mleczko, Jerzy Januszewskimo
- Page 78 and 79: Edward Mleczko, Jerzy Januszewskizw
- Page 81: PRACE PRZEGLĄDOWEREVIEW PAPERS
- Page 84 and 85: Janusz M. Morawskigicznych ma podł
- Page 86 and 87: Janusz M. Morawskikolanowym, 0 2. D
- Page 90 and 91: Janusz M. MorawskiRyc. 5. Przebiegi
- Page 92 and 93: Janusz M. MorawskiRyc. 11. Krzywa k
- Page 94 and 95: Janusz M. MorawskiRyc. 13. Prosty u
- Page 96 and 97: Janusz M. MorawskiRyc. 17. Tłumien
- Page 98 and 99: Janusz M. Morawskion dotyczyć tak
- Page 101 and 102: NR 46 AN TRO PO MO TO RY KA2009PRZE
- Page 103 and 104: Przegląd prac szkoły Profesora Pe
- Page 105 and 106: Przegląd prac szkoły Profesora Pe
- Page 107 and 108: Przegląd prac szkoły Profesora Pe
- Page 109 and 110: Przegląd prac szkoły Profesora Pe
- Page 111 and 112: Przegląd prac szkoły Profesora Pe
- Page 113: POLEMIKI I DYSKUSJEDISCUSSIONS
- Page 116 and 117: Wacław Petryńskireprezentatywnej.
- Page 118 and 119: Wacław PetryńskiJak wynika ze wsp
- Page 120 and 121: Józef Drabiknych, biochemicznych i
- Page 122 and 123: Józef Drabikjęcia w tytule), trze
- Page 125: RECENZJEREVIEWS
- Page 128 and 129: Zbigniew Czajkowskiziom światowy i
- Page 130 and 131: Zbigniew Czajkowskiścią na podsta
- Page 132 and 133: Zbigniew CzajkowskiTyszlera, Lwa Ku
- Page 135: NR 46 AN TRO PO MO TO RY KA2009KONK



![Antropomotoryka nr 57 [2012]. - Akademia Wychowania Fizycznego ...](https://img.yumpu.com/50213388/1/182x260/antropomotoryka-nr-57-2012-akademia-wychowania-fizycznego-.jpg?quality=85)