

Detektering og klassificering af kimplanter ved brug af computer vision
Detektering og klassificering af kimplanter ved brug af computer vision
Detektering og klassificering af kimplanter ved brug af computer vision

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
11 TopDetection 11.1 Indledning<br />
11 TopDetection<br />
11.1 Indledning<br />
Formålet med TopDetection er, at kunne finde enten top eller<br />
bund på kimene. Dette ønskes gjort, da en robot skal kunne gribe<br />
kimene, <strong>og</strong> lægge dem op på række <strong>ved</strong> siden <strong>af</strong> hinanden, således<br />
at toppene vender henholdsvis den ene eller den anden vej. På<br />
denne måde bliver der plads til, at kimene kan vokse på et mindre<br />
areal, <strong>og</strong> dermed udnyttes den skål, hvori de ligger, bedre.<br />
Algoritmen skal optimeres til at virke på kim, som ikke bliver sorteret<br />
fra pga. deres dårlige kvalitet (dette gennemgås nærmere i 13<br />
Quality s. 60).<br />
11.2 Teori<br />
Der er lavet en brainstorm som findes i Appendiks 18.7 Valg <strong>af</strong><br />
TopDetection-algoritme s. 93. Heri beskrives det, hvilke algoritmer gruppen i<br />
fællesskab, har fundet frem til i brainstormen. Ydermere gennemgås en<br />
særlig rating, der blev foretaget, for at kunne udvælge algoritmen, gruppen<br />
mente havde det største potentiale. Valget faldt på Arealforskel-algoritmen.<br />
11.2.1 Arealforskel<br />
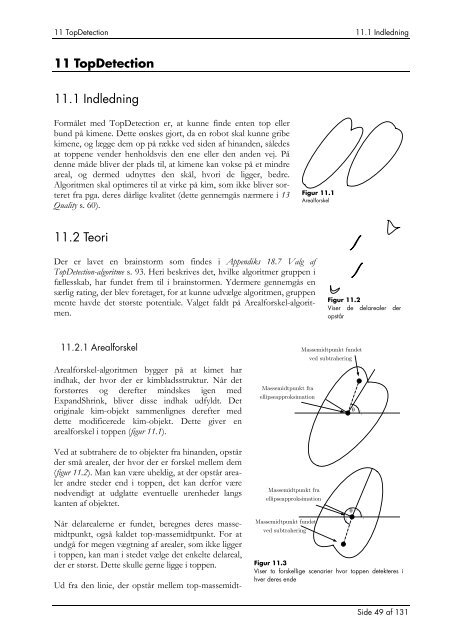
Arealforskel-algoritmen bygger på at kimet har<br />
indhak, der hvor der er kimbladsstruktur. Når det<br />
forstørres <strong>og</strong> derefter mindskes igen med<br />
ExpandShrink, bliver disse indhak udfyldt. Det<br />
originale kim-objekt sammenlignes derefter med<br />
dette modificerede kim-objekt. Dette giver en<br />
arealforskel i toppen (figur 11.1).<br />
Ved at subtrahere de to objekter fra hinanden, opstår<br />
der små arealer, der hvor der er forskel mellem dem<br />
(figur 11.2). Man kan være uheldig, at der opstår arealer<br />
andre steder end i toppen, det kan derfor være<br />
nødvendigt at udglatte eventuelle urenheder langs<br />
kanten <strong>af</strong> objektet.<br />
Når delarealerne er fundet, beregnes deres massemidtpunkt,<br />
<strong>og</strong>så kaldet top-massemidtpunkt. For at<br />
undgå for megen vægtning <strong>af</strong> arealer, som ikke ligger<br />
i toppen, kan man i stedet vælge det enkelte delareal,<br />
der er størst. Dette skulle gerne ligge i toppen.<br />
Ud fra den linie, der opstår mellem top-massemidt-<br />
Massemidtpunkt fra<br />
ellipseapproksimation<br />
Figur 11.1<br />
Arealforskel<br />
Massemidtpunkt fra<br />
ellipseapproksimation<br />
Massemidtpunkt fundet<br />
<strong>ved</strong> subtrahering<br />
Figur 11.2<br />
Viser de delarealer der<br />
opstår<br />
Massemidtpunkt fundet<br />
<strong>ved</strong> subtrahering<br />
Figur 11.3<br />
Viser to forskellige scenarier hvor toppen detekteres i<br />
hver deres ende<br />
θ<br />
θ<br />
Side 49 <strong>af</strong> 131