Download - Virtual Vehicle
Download - Virtual Vehicle
Download - Virtual Vehicle

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
damit die Performance des Gesamtsystems<br />
verbessert werden.<br />
Beispielanwendung aus dem Projekt<br />
Multidisziplinäre Optimierung in der<br />
Fahrwerksentwicklung<br />
Die theoretischen Ausführungen wurden am<br />
VIRTUAL VEHICLE gemeinsam mit dem Forschungspartner<br />
Siemens in verschiedenen<br />
praktischen Anwendungen verifiziert.<br />
Eine Beispielanwendung aus der Fahrwerksentwicklung<br />
ist der klassische Widerspruch<br />
zwischen der Einhaltung des Lichtraumprofils<br />
und der Entgleisungssicherheit. Die zu optimierenden<br />
Variablen (Designvariablen) sind<br />
die Steifigkeit der Primärfeder in vertikaler<br />
Richtung (cz+) sowie die sekundäre Wanksteifigkeit<br />
(cw). Sind diese Steifigkeiten hoch, dann<br />
erreicht man zwar eine Reduktion der Wankbewegung,<br />
allerdings steigt dann auch die Tendenz<br />
zur Radentlastung in Verwindungen und<br />
damit die Entgleisungsgefahr. Eine zusätzliche<br />
Nebenbedingung ergibt sich durch den vorhandenen<br />
Bauraum, der eine obere Grenze der<br />
möglichen Federwege und somit eine Untergrenze<br />
der Federsteifigkeiten vorgibt.<br />
Die Sicherheit gegen Entgleisen ergibt sich aus<br />
dem Quotienten zwischen lateraler und vertikaler<br />
Rad-Schiene-Kraft. Die dazu notwendige<br />
Bestimmung der lateralen Führungskraft<br />
in einem 150m-Bogen erfolgt automatisiert<br />
durch MKS-Simulation. Die Berechnung des<br />
Wankverhaltens erfolgt durch ein iteratives<br />
analytisches Verfahren aus den Fahrzeugparametern.<br />
Der benötigte primäre Federweg zu<br />
einer gegebenen Primärvertikalsteifigkeit wird<br />
parallel dazu durch MKS-Simulation verschie-<br />
dener kritischer Szenarien<br />
bestimmt.<br />
Die spezifische Optimierungsumgebung<br />
für diese<br />
Problemstellung ist in Abbildung<br />
2 dargestellt. Sie<br />
muss die Durchgängigkeit<br />
der Datenstrukturen derart<br />
sicherstellen, dass alle beteiligten Simulationsläufe<br />
immer mit denselben, aktuellen Werten<br />
der Designvariablen ausgeführt werden.<br />
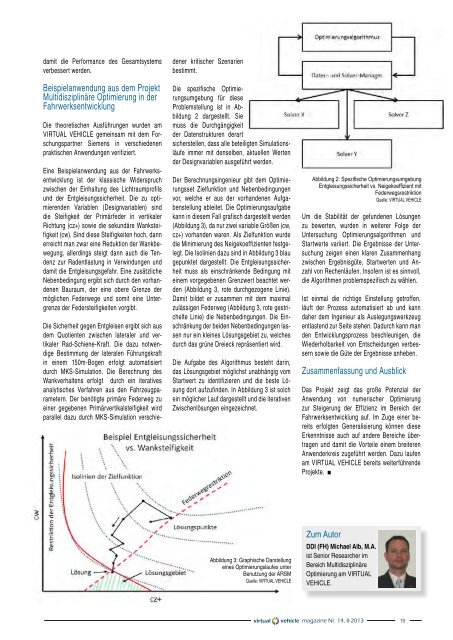
Der Berechnungsingenieur gibt dem Optimierungsset<br />
Zielfunktion und Nebenbedingungen<br />
vor, welche er aus der vorhandenen Aufgabenstellung<br />
ableitet. Die Optimierungsaufgabe<br />
kann in diesem Fall grafisch dargestellt werden<br />
(Abbildung 3), da nur zwei variable Größen (cw,<br />
cz+) vorhanden waren. Als Zielfunktion wurde<br />
die Minimierung des Neigekoeffizienten festgelegt.<br />
Die Isolinien dazu sind in Abbildung 3 blau<br />
gepunktet dargestellt. Die Entgleisungssicherheit<br />
muss als einschränkende Bedingung mit<br />
einem vorgegebenen Grenzwert beachtet werden<br />
(Abbildung 3, rote durchgezogene Linie).<br />
Damit bildet er zusammen mit dem maximal<br />
zulässigen Federweg (Abbildung 3, rote gestrichelte<br />
Linie) die Nebenbedingungen. Die Einschränkung<br />
der beiden Nebenbedingungen lassen<br />
nur ein kleines Lösungsgebiet zu, welches<br />
durch das grüne Dreieck repräsentiert wird.<br />
Die Aufgabe des Algorithmus besteht darin,<br />
das Lösungsgebiet möglichst unabhängig vom<br />
Startwert zu identifizieren und die beste Lösung<br />
dort aufzufinden. In Abbildung 3 ist solch<br />
ein möglicher Lauf dargestellt und die iterativen<br />
Zwischenlösungen eingezeichnet.<br />
Abbildung 3: Graphische Darstellung<br />
eines Optimierungslaufes unter<br />
Benutzung der ARSM<br />
Quelle: VIRTUAL VEHICLE<br />
Abbildung 2: Spezifische Optimierungsumgebung<br />
Entgleisungssicherheit vs. Neigekoeffizient mit<br />
Federwegsrestriktion<br />
Quelle: VIRTUAL VEHICLE<br />
Um die Stabilität der gefundenen Lösungen<br />
zu bewerten, wurden in weiterer Folge der<br />
Untersuchung Optimierungsalgorithmen und<br />
Startwerte variiert. Die Ergebnisse der Untersuchung<br />
zeigen einen klaren Zusammenhang<br />
zwischen Ergebnisgüte, Startwerten und Anzahl<br />
von Rechenläufen. Insofern ist es sinnvoll,<br />
die Algorithmen problemspezifisch zu wählen.<br />
Ist einmal die richtige Einstellung getroffen,<br />
läuft der Prozess automatisiert ab und kann<br />
daher dem Ingenieur als Auslegungswerkzeug<br />
entlastend zur Seite stehen. Dadurch kann man<br />
den Entwicklungsprozess beschleunigen, die<br />
Wiederholbarkeit von Entscheidungen verbessern<br />
sowie die Güte der Ergebnisse anheben.<br />
Zusammenfassung und Ausblick<br />
Das Projekt zeigt das große Potenzial der<br />
Anwendung von numerischer Optimierung<br />
zur Steigerung der Effizienz im Bereich der<br />
Fahrwerksentwicklung auf. Im Zuge einer bereits<br />
erfolgten Generalisierung können diese<br />
Erkenntnisse auch auf andere Bereiche übertragen<br />
und damit die Vorteile einem breiteren<br />
Anwenderkreis zugeführt werden. Dazu laufen<br />
am VIRTUAL VEHICLE bereits weiterführende<br />
Projekte. ■<br />
Zum Autor<br />
DDI (FH) Michael Alb, M.A.<br />
ist Senior Researcher im<br />
Bereich Multidisziplinäre<br />
Optimierung am VIRTUAL<br />
VEHICLE.<br />
magazine Nr. 14, II-2013<br />
19