motocalveg - Motoman
motocalveg - Motoman
motocalveg - Motoman

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
MOTOCALVEG<br />
Abbildung 3.1.11: Anzeige falls die Kalibrierung erfolgreich beendet wurde.<br />
In diesem Fall muß ein neuer Kalibrier-Job erstellt und die Kalibrierung nochmals durchgeführt<br />
werden. Falls die Kalibrierung mit dem neuen Job ebenfalls nicht möglich ist, muß der<br />
Berechnungsbereich für die einzelnen Achsen erhöht werden. Dazu öffnen Sie den Menüpunkt<br />
„Berechnungsbereich“ im Menü „Optionen“.<br />
Wenn die Kalibrierung erfolgreich beendet wurde, dann laden Sie nun folgende Dateien zurück in<br />
den Roboterkontroller:<br />
ABSO.DAT<br />
TOOL.CND (TOOL.DAT bei ERC)<br />
Führen Sie beim Roboterkontroller einen Reset durch, indem Sie den Hauptschalter aus und dann<br />
wieder einschalten.<br />
Zur Überprüfung der der neuen Absolut- und Werkzeugdaten erstellen Sie einen 7-Punkte Job.<br />
Dieser Überprüfungs-Job sollte den Namen P7-NEW.JBI erhalten.<br />
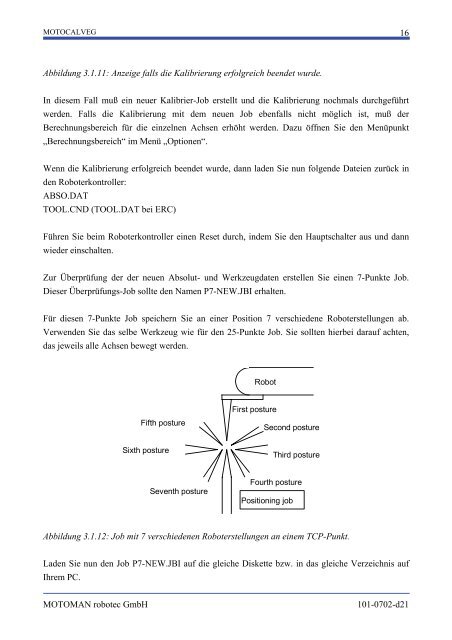
Für diesen 7-Punkte Job speichern Sie an einer Position 7 verschiedene Roboterstellungen ab.<br />
Verwenden Sie das selbe Werkzeug wie für den 25-Punkte Job. Sie sollten hierbei darauf achten,<br />
das jeweils alle Achsen bewegt werden.<br />
Fifth posture<br />
Sixth posture<br />
Seventh posture<br />
Robot<br />
First posture<br />
Second posture<br />
Positioning job<br />
Third posture<br />
Fourth posture<br />
Abbildung 3.1.12: Job mit 7 verschiedenen Roboterstellungen an einem TCP-Punkt.<br />
Laden Sie nun den Job P7-NEW.JBI auf die gleiche Diskette bzw. in das gleiche Verzeichnis auf<br />
Ihrem PC.<br />
MOTOMAN robotec GmbH 101-0702-d21<br />
16