motocalveg - Motoman
motocalveg - Motoman
motocalveg - Motoman

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
MOTOCALVEG<br />
3.2 Kalibrierung des Werkzeugs<br />
Montieren Sie das Werkzeug mit dem der Kalibrierungs-Job erstellt werden soll an den<br />
Roboterflansch und tragen Sie die ungefähren Werkzeugdaten unter der Werkzeugnummer 0 ein.<br />
Erstellen Sie einen 7-Punkte Kalibrierungs-Job mit dem Namen TOOL.JBI. Dieser Job wird später<br />
zur Kalibrierung auf dem PC benötigt.<br />
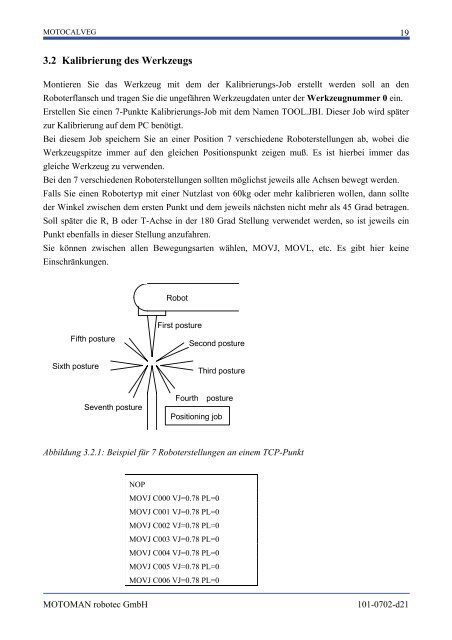
Bei diesem Job speichern Sie an einer Position 7 verschiedene Roboterstellungen ab, wobei die<br />
Werkzeugspitze immer auf den gleichen Positionspunkt zeigen muß. Es ist hierbei immer das<br />
gleiche Werkzeug zu verwenden.<br />
Bei den 7 verschiedenen Roboterstellungen sollten möglichst jeweils alle Achsen bewegt werden.<br />
Falls Sie einen Robotertyp mit einer Nutzlast von 60kg oder mehr kalibrieren wollen, dann sollte<br />
der Winkel zwischen dem ersten Punkt und dem jeweils nächsten nicht mehr als 45 Grad betragen.<br />
Soll später die R, B oder T-Achse in der 180 Grad Stellung verwendet werden, so ist jeweils ein<br />
Punkt ebenfalls in dieser Stellung anzufahren.<br />
Sie können zwischen allen Bewegungsarten wählen, MOVJ, MOVL, etc. Es gibt hier keine<br />
Einschränkungen.<br />
Fifth posture<br />
Sixth posture<br />
Seventh posture<br />
Robot<br />
First posture<br />
Second posture<br />
Third posture<br />
Fourth posture<br />
Positioning job<br />
Abbildung 3.2.1: Beispiel für 7 Roboterstellungen an einem TCP-Punkt<br />
NOP<br />
MOVJ C000 VJ=0.78 PL=0<br />
MOVJ C001 VJ=0.78 PL=0<br />
MOVJ C002 VJ=0.78 PL=0<br />
MOVJ C003 VJ=0.78 PL=0<br />
MOVJ C004 VJ=0.78 PL=0<br />
MOVJ C005 VJ=0.78 PL=0<br />
MOVJ C006 VJ=0.78 PL=0<br />
MOTOMAN robotec GmbH 101-0702-d21<br />
19