

VKR C2 edition2005 - KUKA Robotics
VKR C2 edition2005 - KUKA Robotics
VKR C2 edition2005 - KUKA Robotics

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
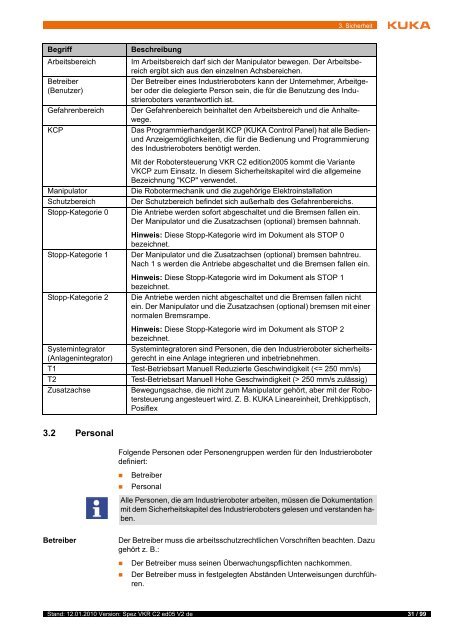
3. SicherheitBegriffArbeitsbereichBetreiber(Benutzer)GefahrenbereichKCPManipulatorSchutzbereichStopp-Kategorie 0Stopp-Kategorie 1Stopp-Kategorie 2Systemintegrator(Anlagenintegrator)T1T2ZusatzachseBeschreibungIm Arbeitsbereich darf sich der Manipulator bewegen. Der Arbeitsbereichergibt sich aus den einzelnen Achsbereichen.Der Betreiber eines Industrieroboters kann der Unternehmer, Arbeitgeberoder die delegierte Person sein, die für die Benutzung des Industrierobotersverantwortlich ist.Der Gefahrenbereich beinhaltet den Arbeitsbereich und die Anhaltewege.Das Programmierhandgerät KCP (<strong>KUKA</strong> Control Panel) hat alle BedienundAnzeigemöglichkeiten, die für die Bedienung und Programmierungdes Industrieroboters benötigt werden.Mit der Robotersteuerung <strong>VKR</strong> <strong>C2</strong> <strong>edition2005</strong> kommt die VarianteVKCP zum Einsatz. In diesem Sicherheitskapitel wird die allgemeineBezeichnung "KCP" verwendet.Die Robotermechanik und die zugehörige ElektroinstallationDer Schutzbereich befindet sich außerhalb des Gefahrenbereichs.Die Antriebe werden sofort abgeschaltet und die Bremsen fallen ein.Der Manipulator und die Zusatzachsen (optional) bremsen bahnnah.Hinweis: Diese Stopp-Kategorie wird im Dokument als STOP 0bezeichnet.Der Manipulator und die Zusatzachsen (optional) bremsen bahntreu.Nach 1 s werden die Antriebe abgeschaltet und die Bremsen fallen ein.Hinweis: Diese Stopp-Kategorie wird im Dokument als STOP 1bezeichnet.Die Antriebe werden nicht abgeschaltet und die Bremsen fallen nichtein. Der Manipulator und die Zusatzachsen (optional) bremsen mit einernormalen Bremsrampe.Hinweis: Diese Stopp-Kategorie wird im Dokument als STOP 2bezeichnet.Systemintegratoren sind Personen, die den Industrieroboter sicherheitsgerechtin eine Anlage integrieren und inbetriebnehmen.Test-Betriebsart Manuell Reduzierte Geschwindigkeit ( 250 mm/s zulässig)Bewegungsachse, die nicht zum Manipulator gehört, aber mit der Robotersteuerungangesteuert wird. Z. B. <strong>KUKA</strong> Lineareinheit, Drehkipptisch,Posiflex3.2 PersonalFolgende Personen oder Personengruppen werden für den Industrieroboterdefiniert:• Betreiber• PersonalAlle Personen, die am Industrieroboter arbeiten, müssen die Dokumentationmit dem Sicherheitskapitel des Industrieroboters gelesen und verstanden haben.BetreiberDer Betreiber muss die arbeitsschutzrechtlichen Vorschriften beachten. Dazugehört z. B.:• Der Betreiber muss seinen Überwachungspflichten nachkommen.• Der Betreiber muss in festgelegten Abständen Unterweisungen durchführen.Stand: 12.01.2010 Version: Spez <strong>VKR</strong> <strong>C2</strong> ed05 V2 de31 / 99













