1st Joint ESMAC-GCMAS Meeting - Análise de Marcha
1st Joint ESMAC-GCMAS Meeting - Análise de Marcha
1st Joint ESMAC-GCMAS Meeting - Análise de Marcha

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
similarity measure while a volume penalty term discourages improbable or impossible<br />
<strong>de</strong>formations. In a final step, the positions of the patient’s muscle origins in the respective<br />
image volume are retrieved after applying the resulting 3D <strong>de</strong>formation field to the original<br />
atlas coordinates.<br />
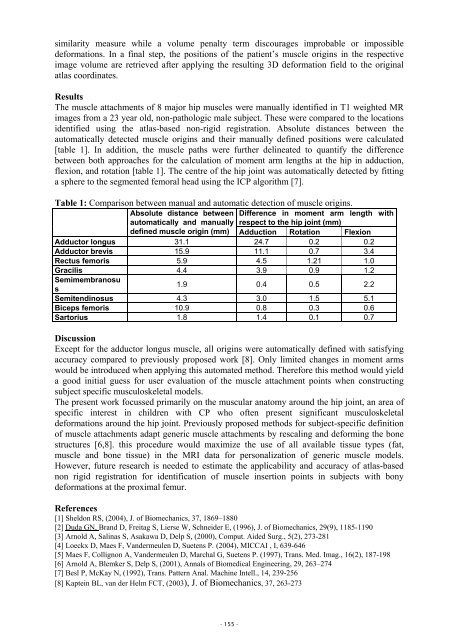
Results<br />
The muscle attachments of 8 major hip muscles were manually i<strong>de</strong>ntified in T1 weighted MR<br />
images from a 23 year old, non-pathologic male subject. These were compared to the locations<br />
i<strong>de</strong>ntified using the atlas-based non-rigid registration. Absolute distances between the<br />
automatically <strong>de</strong>tected muscle origins and their manually <strong>de</strong>fined positions were calculated<br />
[table 1]. In addition, the muscle paths were further <strong>de</strong>lineated to quantify the difference<br />
between both approaches for the calculation of moment arm lengths at the hip in adduction,<br />
flexion, and rotation [table 1]. The centre of the hip joint was automatically <strong>de</strong>tected by fitting<br />
a sphere to the segmented femoral head using the ICP algorithm [7].<br />
Table 1: Comparison between manual and automatic <strong>de</strong>tection of muscle origins.<br />
Absolute distance between Difference in moment arm length with<br />
automatically and manually respect to the hip joint (mm)<br />
<strong>de</strong>fined muscle origin (mm) Adduction Rotation Flexion<br />
Adductor longus 31.1 24.7 0.2 0.2<br />
Adductor brevis 15.9 11.1 0.7 3.4<br />
Rectus femoris 5.9 4.5 1.21 1.0<br />
Gracilis 4.4 3.9 0.9 1.2<br />
Semimembranosu<br />
s<br />
1.9 0.4 0.5 2.2<br />
Semitendinosus 4.3 3.0 1.5 5.1<br />
Biceps femoris 10.9 0.8 0.3 0.6<br />
Sartorius 1.8 1.4 0.1 0.7<br />
Discussion<br />
Except for the adductor longus muscle, all origins were automatically <strong>de</strong>fined with satisfying<br />
accuracy compared to previously proposed work [8]. Only limited changes in moment arms<br />
would be introduced when applying this automated method. Therefore this method would yield<br />
a good initial guess for user evaluation of the muscle attachment points when constructing<br />
subject specific musculoskeletal mo<strong>de</strong>ls.<br />
The present work focussed primarily on the muscular anatomy around the hip joint, an area of<br />
specific interest in children with CP who often present significant musculoskeletal<br />
<strong>de</strong>formations around the hip joint. Previously proposed methods for subject-specific <strong>de</strong>finition<br />
of muscle attachments adapt generic muscle attachments by rescaling and <strong>de</strong>forming the bone<br />
structures [6,8]. this procedure would maximize the use of all available tissue types (fat,<br />
muscle and bone tissue) in the MRI data for personalization of generic muscle mo<strong>de</strong>ls.<br />
However, future research is nee<strong>de</strong>d to estimate the applicability and accuracy of atlas-based<br />
non rigid registration for i<strong>de</strong>ntification of muscle insertion points in subjects with bony<br />
<strong>de</strong>formations at the proximal femur.<br />
References<br />
[1] Sheldon RS, (2004), J. of Biomechanics, 37, 1869–1880<br />
[2] Duda GN, Brand D, Freitag S, Lierse W, Schnei<strong>de</strong>r E, (1996), J. of Biomechanics, 29(9), 1185-1190<br />
[3] Arnold A, Salinas S, Asakawa D, Delp S, (2000), Comput. Ai<strong>de</strong>d Surg., 5(2), 273-281<br />
[4] Loeckx D, Maes F, Van<strong>de</strong>rmeulen D, Suetens P. (2004), MICCAI , I, 639-646<br />
[5] Maes F, Collignon A, Van<strong>de</strong>rmeulen D, <strong>Marcha</strong>l G, Suetens P. (1997), Trans. Med. Imag., 16(2), 187-198<br />
[6] Arnold A, Blemker S, Delp S, (2001), Annals of Biomedical Engineering, 29, 263–274<br />
[7] Besl P, McKay N, (1992), Trans. Pattern Anal. Machine Intell., 14, 239-256<br />
[8] Kaptein BL, van <strong>de</strong>r Helm FCT, (2003), J. of Biomechanics, 37, 263-273<br />
- 155 -