CHEM02200704003 Nilamadhab Pandhy - Homi Bhabha National ...
CHEM02200704003 Nilamadhab Pandhy - Homi Bhabha National ...
CHEM02200704003 Nilamadhab Pandhy - Homi Bhabha National ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Chapter 3<br />
3.1.3.2 Atomic force microscopy<br />
Atomic Force Microscope (AFM) is one of the important equipment in the field of material<br />
science for surface investigation from micron to nano-meter range in ultrahigh vacuum, ambient<br />
condition and liquid environment. The advantage of this microscope is that it is capable for<br />
studying all types of surfaces such as conducting, semi-conducting and insulating of materials.<br />
Major applications of atomic force microscope includes, (a) polymer crystallization studies, (b)<br />
physical property measurement of thin films (c) failure analysis of integrated circuits, (d) presence<br />
of phases in metals and alloys, (e) study of morphology of oxide films present on the surface, (f)<br />
topographical variation due to process of corrosion, and (g) microscopic imaging of biological<br />
specimens [65-69].<br />
Atomic force microscope scans the surface in rastering pattern with the help of a probe to<br />
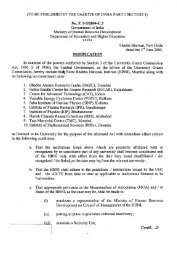
obtain the information about the surface [70]. The schematic of an atomic force microscope is<br />
shown in Fig. 2.4 [71]. It consists of (a) probe, (b) scanner (c) detection system, and (d) feedback<br />
loop. The probe consists of a sharp tip made up of Si or Si 3 N 4 at the end of a cantilever which<br />
scans the surface. The scanner which is made up piezo-ceramic elements and moves the tip in X,<br />
Y and Z directions. The three dimensional movement of the tip is detected by the deflection of the<br />
laser from the cantilever by photodiode. The feedback loop helps in detecting the force of<br />
interaction between the tip and sample, and alters the tip-sample distance.<br />
The basic modes of operation of AFM are; (a) contact mode, (b) semi-contact mode, and<br />
(c) non-contact mode, respectively. In contact mode, tip scans the sample in close contact with the<br />
surface, and is the most common mode of operation. In semi-contact mode, the tip oscillates near<br />
the surface, and the reduction in amplitude of oscillation of cantilever is used to identify the<br />
surface topography. In non-contact mode, tip measures the surface topography by sensing the van<br />
der Walls force between tip and sample.