

Ecole Centrale of Nantes - IRCCyN
Ecole Centrale of Nantes - IRCCyN
Ecole Centrale of Nantes - IRCCyN

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Codes<br />
TRO08<br />
AR08<br />
JISR08<br />
JMST08<br />
TRO09<br />
IJRR09<br />
ITITS09<br />
LNEE09<br />
JISR09<br />
JFR10<br />
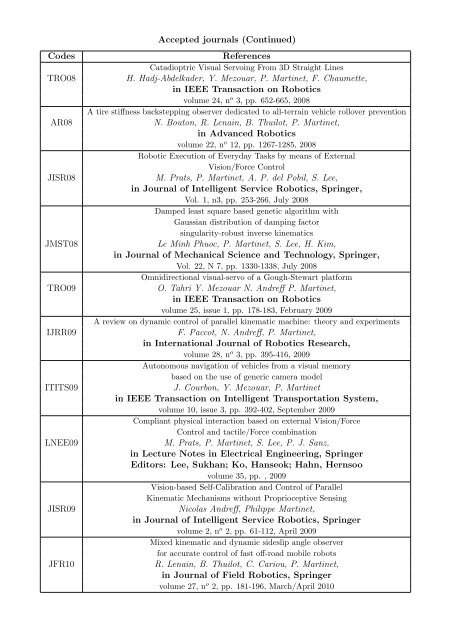
Accepted journals (Continued)<br />
References<br />
Catadioptric Visual Servoing From 3D Straight Lines<br />
H. Hadj-Abdelkader, Y. Mezouar, P. Martinet, F. Chaumette,<br />
in IEEE Transaction on Robotics<br />
volume 24, n o 3, pp. 652-665, 2008<br />
A tire stiffness backstepping observer dedicated to all-terrain vehicle rollover prevention<br />
N. Bouton, R. Lenain, B. Thuilot, P. Martinet,<br />
in Advanced Robotics<br />
volume 22, n o 12, pp. 1267-1285, 2008<br />
Robotic Execution <strong>of</strong> Everyday Tasks by means <strong>of</strong> External<br />
Vision/Force Control<br />
M. Prats, P. Martinet, A. P. del Pobil, S. Lee,<br />
in Journal <strong>of</strong> Intelligent Service Robotics, Springer,<br />
Vol. 1, n3, pp. 253-266, July 2008<br />
Damped least square based genetic algorithm with<br />
Gaussian distribution <strong>of</strong> damping factor<br />
singularity-robust inverse kinematics<br />
Le Minh Phuoc, P. Martinet, S. Lee, H. Kim,<br />
in Journal <strong>of</strong> Mechanical Science and Technology, Springer,<br />
Vol. 22, N 7, pp. 1330-1338, July 2008<br />
Omnidirectional visual-servo <strong>of</strong> a Gough-Stewart platform<br />
O. Tahri Y. Mezouar N. Andreff P. Martinet,<br />
in IEEE Transaction on Robotics<br />
volume 25, issue 1, pp. 178-183, February 2009<br />
A review on dynamic control <strong>of</strong> parallel kinematic machine: theory and experiments<br />
F. Paccot, N. Andreff, P. Martinet,<br />
in International Journal <strong>of</strong> Robotics Research,<br />
volume 28, n o 3, pp. 395-416, 2009<br />
Autonomous navigation <strong>of</strong> vehicles from a visual memory<br />
based on the use <strong>of</strong> generic camera model<br />
J. Courbon, Y. Mezouar, P. Martinet<br />
in IEEE Transaction on Intelligent Transportation System,<br />
volume 10, issue 3, pp. 392-402, September 2009<br />
Compliant physical interaction based on external Vision/Force<br />
Control and tactile/Force combination<br />
M. Prats, P. Martinet, S. Lee, P. J. Sanz,<br />
in Lecture Notes in Electrical Engineering, Springer<br />
Editors: Lee, Sukhan; Ko, Hanseok; Hahn, Hernsoo<br />
volume 35, pp. , 2009<br />
Vision-based Self-Calibration and Control <strong>of</strong> Parallel<br />
Kinematic Mechanisms without Proprioceptive Sensing<br />
Nicolas Andreff, Philippe Martinet,<br />
in Journal <strong>of</strong> Intelligent Service Robotics, Springer<br />
volume 2, n o 2, pp. 61-112, April 2009<br />
Mixed kinematic and dynamic sideslip angle observer<br />
for accurate control <strong>of</strong> fast <strong>of</strong>f-road mobile robots<br />
R. Lenain, B. Thuilot, C. Cariou, P. Martinet,<br />
in Journal <strong>of</strong> Field Robotics, Springer<br />
volume 27, n o 2, pp. 181-196, March/April 2010













