

Ecole Centrale of Nantes - IRCCyN
Ecole Centrale of Nantes - IRCCyN
Ecole Centrale of Nantes - IRCCyN

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Codes<br />
IROS10<br />
IROS10<br />
ICARCV10<br />
IROS11<br />
IROS11<br />
ECMR11<br />
ICINCO11<br />
IFAC11<br />
ICRA11<br />
ICRA11<br />
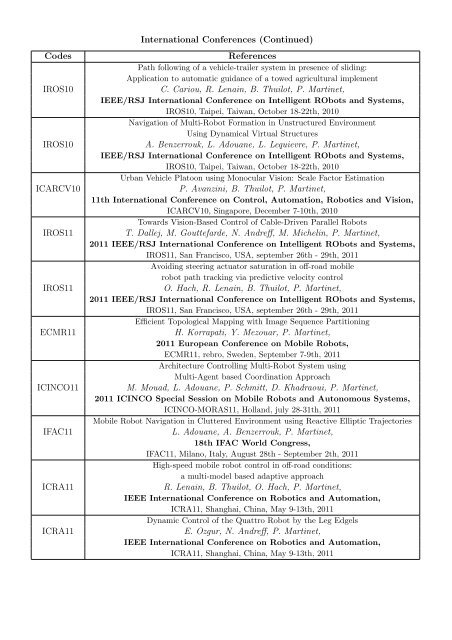
International Conferences (Continued)<br />
References<br />
Path following <strong>of</strong> a vehicle-trailer system in presence <strong>of</strong> sliding:<br />
Application to automatic guidance <strong>of</strong> a towed agricultural implement<br />
C. Cariou, R. Lenain, B. Thuilot, P. Martinet,<br />
IEEE/RSJ International Conference on Intelligent RObots and Systems,<br />
IROS10, Taipei, Taiwan, October 18-22th, 2010<br />
Navigation <strong>of</strong> Multi-Robot Formation in Unstructured Environment<br />
Using Dynamical Virtual Structures<br />
A. Benzerrouk, L. Adouane, L. Lequievre, P. Martinet,<br />
IEEE/RSJ International Conference on Intelligent RObots and Systems,<br />
IROS10, Taipei, Taiwan, October 18-22th, 2010<br />
Urban Vehicle Platoon using Monocular Vision: Scale Factor Estimation<br />
P. Avanzini, B. Thuilot, P. Martinet,<br />
11th International Conference on Control, Automation, Robotics and Vision,<br />
ICARCV10, Singapore, December 7-10th, 2010<br />
Towards Vision-Based Control <strong>of</strong> Cable-Driven Parallel Robots<br />
T. Dallej, M. Gouttefarde, N. Andreff, M. Michelin, P. Martinet,<br />
2011 IEEE/RSJ International Conference on Intelligent RObots and Systems,<br />
IROS11, San Francisco, USA, september 26th - 29th, 2011<br />
Avoiding steering actuator saturation in <strong>of</strong>f-road mobile<br />
robot path tracking via predictive velocity control<br />
O. Hach, R. Lenain, B. Thuilot, P. Martinet,<br />
2011 IEEE/RSJ International Conference on Intelligent RObots and Systems,<br />
IROS11, San Francisco, USA, september 26th - 29th, 2011<br />
Efficient Topological Mapping with Image Sequence Partitioning<br />
H. Korrapati, Y. Mezouar, P. Martinet,<br />
2011 European Conference on Mobile Robots,<br />
ECMR11, rebro, Sweden, September 7-9th, 2011<br />
Architecture Controlling Multi-Robot System using<br />
Multi-Agent based Coordination Approach<br />
M. Mouad, L. Adouane, P. Schmitt, D. Khadraoui, P. Martinet,<br />
2011 ICINCO Special Session on Mobile Robots and Autonomous Systems,<br />
ICINCO-MORAS11, Holland, july 28-31th, 2011<br />
Mobile Robot Navigation in Cluttered Environment using Reactive Elliptic Trajectories<br />
L. Adouane, A. Benzerrouk, P. Martinet,<br />
18th IFAC World Congress,<br />
IFAC11, Milano, Italy, August 28th - September 2th, 2011<br />
High-speed mobile robot control in <strong>of</strong>f-road conditions:<br />
a multi-model based adaptive approach<br />
R. Lenain, B. Thuilot, O. Hach, P. Martinet,<br />
IEEE International Conference on Robotics and Automation,<br />
ICRA11, Shanghai, China, May 9-13th, 2011<br />
Dynamic Control <strong>of</strong> the Quattro Robot by the Leg Edgels<br />
E. Ozgur, N. Andreff, P. Martinet,<br />
IEEE International Conference on Robotics and Automation,<br />
ICRA11, Shanghai, China, May 9-13th, 2011













