

Ecole Centrale of Nantes - IRCCyN
Ecole Centrale of Nantes - IRCCyN
Ecole Centrale of Nantes - IRCCyN

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
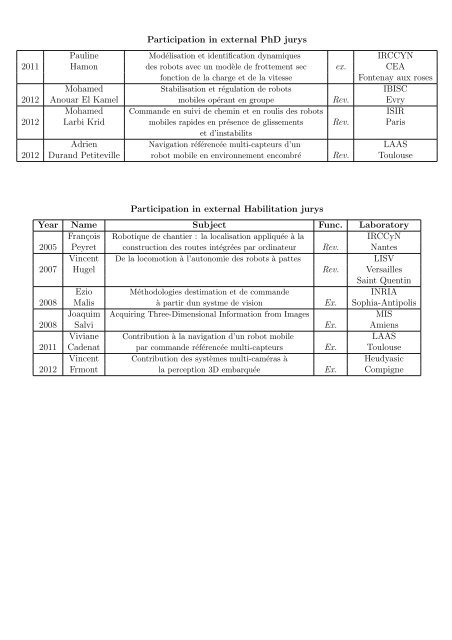
Participation in external PhD jurys<br />
Pauline Modélisation et identification dynamiques IRCCYN<br />
2011 Hamon des robots avec un modèle de frottement sec ex. CEA<br />
fonction de la charge et de la vitesse Fontenay aux roses<br />
Mohamed Stabilisation et régulation de robots IBISC<br />
2012 Anouar El Kamel mobiles opérant en groupe Rev. Evry<br />
Mohamed Commande en suivi de chemin et en roulis des robots ISIR<br />
2012 Larbi Krid mobiles rapides en présence de glissements Rev. Paris<br />
et d’instabilits<br />
Adrien Navigation référencée multi-capteurs d’un LAAS<br />
2012 Durand Petiteville robot mobile en environnement encombré Rev. Toulouse<br />
Participation in external Habilitation jurys<br />
Year Name Subject Func. Laboratory<br />
François Robotique de chantier : la localisation appliquée à la <strong>IRCCyN</strong><br />
2005 Peyret construction des routes intégrées par ordinateur Rev. <strong>Nantes</strong><br />
Vincent De la locomotion à l’autonomie des robots à pattes LISV<br />
2007 Hugel Rev. Versailles<br />
Saint Quentin<br />
Ezio Méthodologies destimation et de commande INRIA<br />
2008 Malis à partir dun systme de vision Ex. Sophia-Antipolis<br />
Joaquim Acquiring Three-Dimensional Information from Images MIS<br />
2008 Salvi Ex. Amiens<br />
Viviane Contribution à la navigation d’un robot mobile LAAS<br />
2011 Cadenat par commande référencée multi-capteurs Ex. Toulouse<br />
Vincent Contribution des systèmes multi-caméras à Heudyasic<br />
2012 Frmont la perception 3D embarquée Ex. Compigne













