Software for the synchronization of axes - Kollmorgen
Software for the synchronization of axes - Kollmorgen
Software for the synchronization of axes - Kollmorgen

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
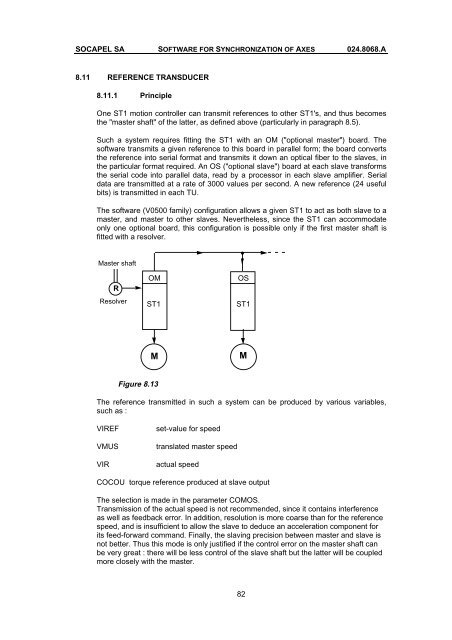
SOCAPEL SA SOFTWARE FOR SYNCHRONIZATION OF AXES 024.8068.A8.11 REFERENCE TRANSDUCER8.11.1 PrincipleOne ST1 motion controller can transmit references to o<strong>the</strong>r ST1's, and thus becomes<strong>the</strong> "master shaft" <strong>of</strong> <strong>the</strong> latter, as defined above (particularly in paragraph 8.5).Such a system requires fitting <strong>the</strong> ST1 with an OM ("optional master") board. Thes<strong>of</strong>tware transmits a given reference to this board in parallel <strong>for</strong>m; <strong>the</strong> board converts<strong>the</strong> reference into serial <strong>for</strong>mat and transmits it down an optical fiber to <strong>the</strong> slaves, in<strong>the</strong> particular <strong>for</strong>mat required. An OS ("optional slave") board at each slave trans<strong>for</strong>ms<strong>the</strong> serial code into parallel data, read by a processor in each slave amplifier. Serialdata are transmitted at a rate <strong>of</strong> 3000 values per second. A new reference (24 usefulbits) is transmitted in each TU.The s<strong>of</strong>tware (V0500 family) configuration allows a given ST1 to act as both slave to amaster, and master to o<strong>the</strong>r slaves. Never<strong>the</strong>less, since <strong>the</strong> ST1 can accommodateonly one optional board, this configuration is possible only if <strong>the</strong> first master shaft isfitted with a resolver.Master shaftRResolverOMST1OSST1MMFigure 8.13The reference transmitted in such a system can be produced by various variables,such as :VIREFVMUSVIRset-value <strong>for</strong> speedtranslated master speedactual speedCOCOU torque reference produced at slave outputThe selection is made in <strong>the</strong> parameter COMOS.Transmission <strong>of</strong> <strong>the</strong> actual speed is not recommended, since it contains interferenceas well as feedback error. In addition, resolution is more coarse than <strong>for</strong> <strong>the</strong> referencespeed, and is insufficient to allow <strong>the</strong> slave to deduce an acceleration component <strong>for</strong>its feed-<strong>for</strong>ward command. Finally, <strong>the</strong> slaving precision between master and slave isnot better. Thus this mode is only justified if <strong>the</strong> control error on <strong>the</strong> master shaft canbe very great : <strong>the</strong>re will be less control <strong>of</strong> <strong>the</strong> slave shaft but <strong>the</strong> latter will be coupledmore closely with <strong>the</strong> master.82