Oasys LS-DYNA Environment 8.1 VOLUME 3 ... - Oasys Software
Oasys LS-DYNA Environment 8.1 VOLUME 3 ... - Oasys Software
Oasys LS-DYNA Environment 8.1 VOLUME 3 ... - Oasys Software

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Oasys</strong> <strong>LS</strong>-<strong>DYNA</strong> <strong>Environment</strong>: User Guide (Version <strong>8.1</strong>)<br />
$<br />
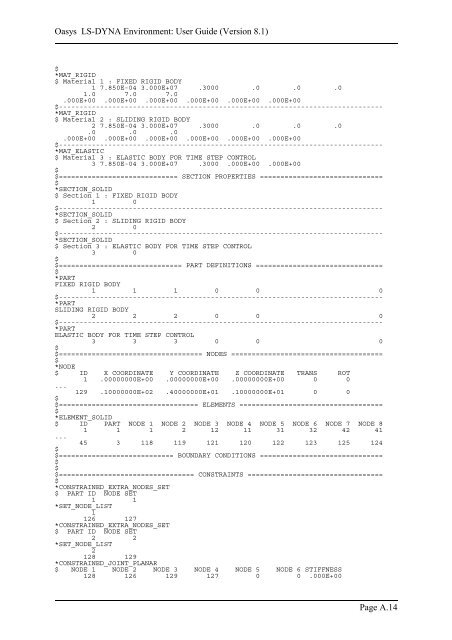
*MAT_RIGID<br />
$ Material 1 : FIXED RIGID BODY<br />
1 7.850E-04 3.000E+07 .3000 .0 .0 .0<br />
1.0 7.0 7.0<br />
.000E+00 .000E+00 .000E+00 .000E+00 .000E+00 .000E+00<br />
$-------------------------------------------------------------------------------<br />
*MAT_RIGID<br />
$ Material 2 : SLIDING RIGID BODY<br />
2 7.850E-04 3.000E+07 .3000 .0 .0 .0<br />
.0 .0 .0<br />
.000E+00 .000E+00 .000E+00 .000E+00 .000E+00 .000E+00<br />
$-------------------------------------------------------------------------------<br />
*MAT_ELASTIC<br />
$ Material 3 : ELASTIC BODY FOR TIME STEP CONTROL<br />
3 7.850E-04 3.000E+07 .3000 .000E+00 .000E+00<br />
$<br />
$============================= SECTION PROPERTIES ==============================<br />
$<br />
*SECTION_SOLID<br />
$ Section 1 : FIXED RIGID BODY<br />
1 0<br />
$-------------------------------------------------------------------------------<br />
*SECTION_SOLID<br />
$ Section 2 : SLIDING RIGID BODY<br />
2 0<br />
$-------------------------------------------------------------------------------<br />
*SECTION_SOLID<br />
$ Section 3 : ELASTIC BODY FOR TIME STEP CONTROL<br />
3 0<br />
$<br />
$============================== PART DEFINITIONS ===============================<br />
$<br />
*PART<br />
FIXED RIGID BODY<br />
1 1 1 0 0 0<br />
$-------------------------------------------------------------------------------<br />
*PART<br />
SLIDING RIGID BODY<br />
2 2 2 0 0 0<br />
$-------------------------------------------------------------------------------<br />
*PART<br />
ELASTIC BODY FOR TIME STEP CONTROL<br />
3 3 3 0 0 0<br />
$<br />
$=================================== NODES =====================================<br />
$<br />
*NODE<br />
$ ID X COORDINATE Y COORDINATE Z COORDINATE TRANS ROT<br />
1 .00000000E+00 .00000000E+00 .00000000E+00 0 0<br />
...<br />
129 .10000000E+02 .40000000E+01 .10000000E+01 0 0<br />
$<br />
$================================== ELEMENTS ===================================<br />
$<br />
*ELEMENT_SOLID<br />
$ ID PART NODE 1 NODE 2 NODE 3 NODE 4 NODE 5 NODE 6 NODE 7 NODE 8<br />
1 1 1 2 12 11 31 32 42 41<br />
...<br />
45 3 118 119 121 120 122 123 125 124<br />
$<br />
$============================ BOUNDARY CONDITIONS ==============================<br />
$<br />
$<br />
$================================= CONSTRAINTS =================================<br />
$<br />
*CONSTRAINED_EXTRA_NODES_SET<br />
$ PART ID NODE SET<br />
1 1<br />
*SET_NODE_LIST<br />
1<br />
126 127<br />
*CONSTRAINED_EXTRA_NODES_SET<br />
$ PART ID NODE SET<br />
2 2<br />
*SET_NODE_LIST<br />
2<br />
128 129<br />
*CONSTRAINED_JOINT_PLANAR<br />
$ NODE 1 NODE 2 NODE 3 NODE 4 NODE 5 NODE 6 STIFFNESS<br />
128 126 129 127 0 0 .000E+00<br />
Page A.14