animeo® KNX 4 DCE Motor Controller WM/DRM 220-240 V AC
animeo® KNX 4 DCE Motor Controller WM/DRM 220-240 V AC
animeo® KNX 4 DCE Motor Controller WM/DRM 220-240 V AC

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
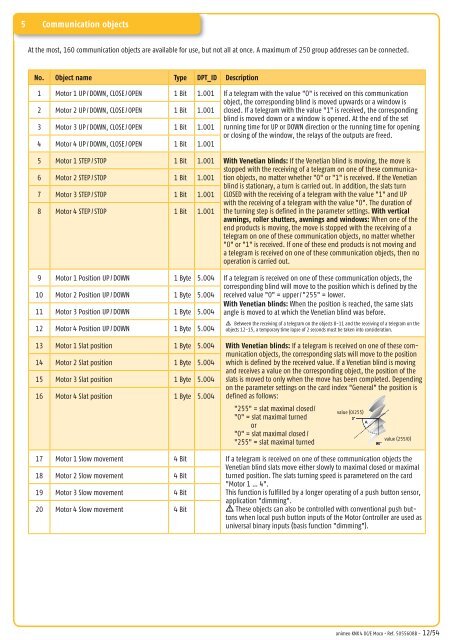
5 Communication objectsAt the most, 160 communication objects are available for use, but not all at once. A maximum of 250 group addresses can be connected.No. Object name Type DPT_ID Description12<strong>Motor</strong> 1 UP / DOWN, CLOSE / OPEN<strong>Motor</strong> 2 UP / DOWN, CLOSE / OPEN1 Bit1 Bit1.0011.001If a telegram with the value "0" is received on this communicationobject, the corresponding blind is moved upwards or a window isclosed. If a telegram with the value "1" is received, the corre sponding3 <strong>Motor</strong> 3 UP / DOWN, CLOSE / OPEN 1 Bit 1.001blind is moved down or a window is opened. At the end of the setrunning time for UP or DOWN direction or the running time for openingor closing of the window, the relays of the outputs are freed.4 <strong>Motor</strong> 4 UP / DOWN, CLOSE / OPEN 1 Bit 1.00156<strong>Motor</strong> 1 STEP / STOP<strong>Motor</strong> 2 STEP / STOP1 Bit1 Bit1.0011.001With Venetian blinds: If the Venetian blind is moving, the move isstopped with the receiving of a telegram on one of these communicationobjects, no matter whether "0" or "1" is received. If the Venetian7 <strong>Motor</strong> 3 STEP / STOP 1 Bit 1.001blind is stationary, a turn is carried out. In addition, the slats turnCLOSED with the receiving of a telegram with the value "1" and UP8 <strong>Motor</strong> 4 STEP / STOP 1 Bit 1.001with the receiving of a telegram with the value "0". The duration ofthe turning step is defined in the parameter settings. With verticalawnings, roller shutters, awnings and windows: When one of theend products is moving, the move is stopped with the receiving of atelegram on one of these communication objects, no matter whether"0" or "1" is received. If one of these end products is not moving anda telegram is received on one of these communication objects, then nooperation is carried out.91011<strong>Motor</strong> 1 Position UP / DOWN<strong>Motor</strong> 2 Position UP / DOWN<strong>Motor</strong> 3 Position UP / DOWN1 Byte1 Byte1 Byte5.0045.0045.004If a telegram is received on one of these communication objects, thecorresponding blind will move to the position which is defined by thereceived value "0" = upper / "255" = lower.With Venetian blinds: When the position is reached, the same slatsangle is moved to at which the Venetian blind was before.12 <strong>Motor</strong> 4 Position UP / DOWN 1 Byte 5.004m Between the receiving of a telegram on the objects 8-11 and the receiving of a telegram on theobjects 12-15, a temporary time lapse of 2 seconds must be taken into consideration.1314<strong>Motor</strong> 1 Slat position<strong>Motor</strong> 2 Slat position1 Byte1 Byte5.0045.004With Venetian blinds: If a telegram is received on one of these communicationobjects, the corresponding slats will move to the positionwhich is defined by the received value. If a Venetian blind is moving15 <strong>Motor</strong> 3 Slat position 1 Byte 5.004and receives a value on the corresponding object, the position of theslats is moved to only when the move has been completed. Depending16 <strong>Motor</strong> 4 Slat position 1 Byte 5.004on the parameter settings on the card index "General" the position isdefined as follows:"255" = slat maximal closed /"0" = slat maximal turnedvalue (0/255)or"0" = slat maximal closed /"255" = slat maximal turnedvalue (255/0)1718<strong>Motor</strong> 1 Slow movement<strong>Motor</strong> 2 Slow movement4 Bit4 BitIf a telegram is received on one of these communication objects theVenetian blind slats move either slowly to maximal closed or maximalturned position. The slats turning speed is para metered on the card19 <strong>Motor</strong> 3 Slow movement 4 Bit"<strong>Motor</strong> 1 … 4".This function is fulfilled by a longer operating of a push button sensor,20 <strong>Motor</strong> 4 Slow movement 4 Bitapplication "dimming".m These objects can also be controlled with conventional push buttonswhen local push button inputs of the <strong>Motor</strong> <strong>Controller</strong> are used asuniversal binary inputs (basis function "dimming").animeo <strong>KNX</strong> 4 DC/E Moco • Ref. 5055608B - 12/54