animeo® KNX 4 DCE Motor Controller WM/DRM 220-240 V AC
animeo® KNX 4 DCE Motor Controller WM/DRM 220-240 V AC
animeo® KNX 4 DCE Motor Controller WM/DRM 220-240 V AC

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
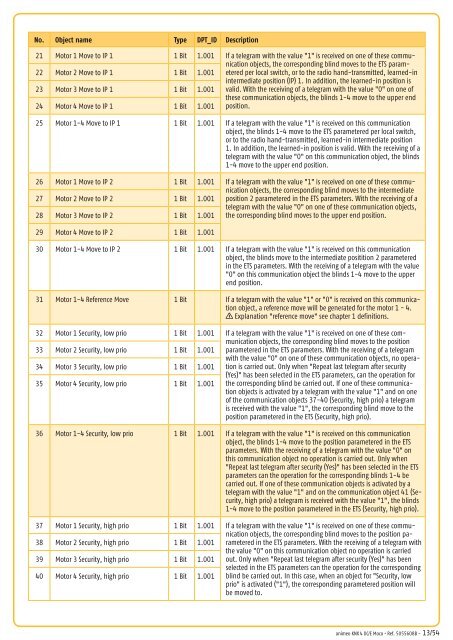
No. Object name Type DPT_ID Description2122<strong>Motor</strong> 1 Move to IP 1<strong>Motor</strong> 2 Move to IP 11 Bit1 Bit1.0011.001If a telegram with the value "1" is received on one of these communicationobjects, the corresponding blind moves to the ETS parameteredper local switch, or to the radio hand-transmitted, learned-in23 <strong>Motor</strong> 3 Move to IP 1 1 Bit 1.001intermediate position (IP) 1. In addition, the learned-in position isvalid. With the receiving of a telegram with the value "0" on one of24 <strong>Motor</strong> 4 Move to IP 1 1 Bit 1.001these communication objects, the blinds 1-4 move to the upper endposition.25 <strong>Motor</strong> 1-4 Move to IP 1 1 Bit 1.001 If a telegram with the value "1" is received on this communicationobject, the blinds 1-4 move to the ETS parametered per local switch,or to the radio hand-transmitted, learned-in intermediate position1. In addition, the learned-in position is valid. With the receiving of atelegram with the value "0" on this communication object, the blinds1-4 move to the upper end position.2627<strong>Motor</strong> 1 Move to IP 2<strong>Motor</strong> 2 Move to IP 21 Bit1 Bit1.0011.001If a telegram with the value "1" is received on one of these communicationobjects, the corresponding blind moves to the intermediateposition 2 parametered in the ETS parameters. With the receiving of a28 <strong>Motor</strong> 3 Move to IP 2 1 Bit 1.001telegram with the value "0" on one of these communication objects,the corresponding blind moves to the upper end position.29 <strong>Motor</strong> 4 Move to IP 2 1 Bit 1.00130 <strong>Motor</strong> 1-4 Move to IP 2 1 Bit 1.001 If a telegram with the value "1" is received on this communicationobject, the blinds move to the intermediate positition 2 parameteredin the ETS parameters. With the receiving of a telegram with the value"0" on this communication object the blinds 1-4 move to the upperend position.31 <strong>Motor</strong> 1-4 Reference Move 1 Bit If a telegram with the value "1" or "0" is received on this communicationobject, a reference move will be generated for the motor 1 - 4.n Explanation "reference move" see chapter 1 definitions.3233<strong>Motor</strong> 1 Security, low prio<strong>Motor</strong> 2 Security, low prio1 Bit1 Bit1.0011.001If a telegram with the value "1" is received on one of these communicationobjects, the corresponding blind moves to the positionparametered in the ETS parameters. With the receiving of a telegram34 <strong>Motor</strong> 3 Security, low prio 1 Bit 1.001with the value "0" on one of these communication objects, no operationis carried out. Only when "Repeat last telegram after security35 <strong>Motor</strong> 4 Security, low prio 1 Bit 1.001(Yes)" has been selected in the ETS parameters, can the operation forthe corresponding blind be carried out. If one of these communicationobjects is activated by a telegram with the value "1" and on oneof the communication objects 37-40 (Security, high prio) a telegramis received with the value "1", the corresponding blind move to theposition parametered in the ETS (Security, high prio).36 <strong>Motor</strong> 1-4 Security, low prio 1 Bit 1.001 If a telegram with the value "1" is received on this communicationobject, the blinds 1-4 move to the position parametered in the ETSparameters. With the receiving of a telegram with the value "0" onthis communication object no operation is carried out. Only when"Repeat last telegram after security (Yes)" has been selected in the ETSparameters can the operation for the corresponding blinds 1-4 becarried out. If one of these communication objects is activated by atelegram with the value "1" and on the communication object 41 (Security,high prio) a telegram is received with the value "1", the blinds1-4 move to the position parametered in the ETS (Security, high prio).3738<strong>Motor</strong> 1 Security, high prio<strong>Motor</strong> 2 Security, high prio1 Bit1 Bit1.0011.001If a telegram with the value "1" is received on one of these communicationobjects, the corresponding blind moves to the position parameteredin the ETS parameters. With the receiving of a telegram with39 <strong>Motor</strong> 3 Security, high prio 1 Bit 1.001the value "0" on this communication object no operation is carriedout. Only when "Repeat last telegram after security (Yes)" has been40 <strong>Motor</strong> 4 Security, high prio 1 Bit 1.001selected in the ETS parameters can the operation for the correspondingblind be carried out. In this case, when an object for "Security, lowprio" is activated ("1"), the corresponding parametered position willbe moved to.animeo <strong>KNX</strong> 4 DC/E Moco • Ref. 5055608B - 13/54