Aerodynamics and Design for Ultra-Low Reynolds Number Flight
Aerodynamics and Design for Ultra-Low Reynolds Number Flight
Aerodynamics and Design for Ultra-Low Reynolds Number Flight

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
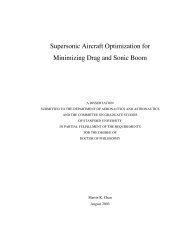
t/c<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
0.0<br />
FIGURE 6.5 Thickness distributions <strong>for</strong> the five-blade 2.2cm diameter rotor.<br />
6.3.2 Four-Blade 2.5cm Diameter Rotor<br />
Baseline Incidence<br />
Incidence +3<br />
0.0 0.2 0.4 0.6 0.8 1.0<br />
r/R<br />
Chapter 6<br />
The four-blade 2.5cm diameter rotor was designed using the method of Chapter 4 <strong>and</strong><br />
incorporates the wake-deficit viscous swirl model <strong>and</strong> the Pr<strong>and</strong>tl tip-loss correction.<br />
The goal was to design the smallest rotor capable of generating 4g of thrust using the<br />
5mm Smoovy motor <strong>and</strong> this resulted in a design operating point of 47,000 RPM. Two<br />
versions have been produced <strong>and</strong> are pictured in Figure 6.6. The first has a hub diameter<br />
of 2mm, which was later increased to 5mm to improve the torsional stiffness of the<br />
blades. The rotor diameter <strong>and</strong> blade count are based on a parametric study completed<br />
with the same code. In this case a four-blade design prevailed. The reduction in blade<br />
count from the 2.2cm diameter rotor can be largely attributed to the change in viscous<br />
swirl models. The average wake deficit model will be shown later to discourage high<br />
local solidity, particularly at the inboard stations. This rotor is the last micro-rotor design<br />
to be manufactured during the mesicopter program. The subsequent 3-D CFD analyses,<br />
which provide additional insight into the relevant flow physics <strong>and</strong> certain trouble spots<br />
101