

p17vn3mf4l14s13eqstbtf63o54.pdf

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Cinemática directa Cinemática inversa Cinemática diferencial Cinemática diferencial inversa Singularidades Preliminares matemáticos de la cinemática directa Matrices de rotación<br />
Matrices de rotación<br />
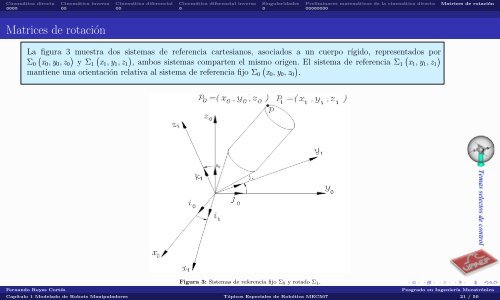
La figura 3muestra dos sistemas de referencia cartesianos, asociados a un cuerpo rígido, representados por <br />
Σ0 x0, y0, z0 y Σ1 x1, y1, z1 , ambos sistemas comparten el mismo origen. El sistema de referencia Σ1 x1, y1, z1<br />
<br />
mantiene una orientación relativa al sistema de referencia fijo Σ0 x0, y0, z0 .<br />
Figura:<br />
Figura 3: Sistemas de referencia fijo Σ0 y rotado Σ1.<br />
Fernando Reyes Cortés Posgrado en Ingeniería Mecatrónica<br />
Capítulo 1 Modelado de Robots Manipuladores Tópicos Especiales de Robótica MEC507 21 / 50