Tesi Specializzazion.. - Ingegneria Strutturale - Politecnico di Milano
Tesi Specializzazion.. - Ingegneria Strutturale - Politecnico di Milano
Tesi Specializzazion.. - Ingegneria Strutturale - Politecnico di Milano

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
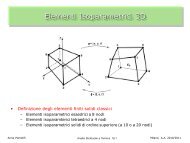
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
5. I vincoli elastici concentrati<br />
Si introduce ora la rigidezza <strong>di</strong> una molla elastica vincolante un nodo qualsiasi. L’orientamento della<br />
molla nello spazio è dato dai tre coseni <strong>di</strong>rettori dell’asse della molla θ x , θ y , θ z . Siano q x , q y , q z gli<br />
spostamenti <strong>di</strong> un estremo della molla, l’allungamento si può scrivere come:<br />
∆ = q cos( θ ) + q cos( θ ) + q cos( θ )<br />
(2.35)<br />
x<br />
x<br />
y<br />
y<br />
z<br />
z<br />
L’energia <strong>di</strong> deformazione risulta:<br />
U<br />
=<br />
1<br />
2<br />
k<br />
[ q cos( θ ) + q cos( θ ) + q cos( θ )] 2<br />
x<br />
x<br />
y<br />
y<br />
z<br />
z<br />
U<br />
1 2<br />
2<br />
2 2<br />
2<br />
2<br />
= k[<br />
q<br />
x<br />
cos ( θ<br />
x<br />
) + q<br />
y<br />
cos ( θ<br />
y<br />
) + q<br />
z<br />
cos ( θ<br />
z<br />
) +<br />
2<br />
2q<br />
q cos( θ )cos( θ ) + 2q<br />
q cos( θ ) cos( θ ) + 2q<br />
q<br />
x<br />
y<br />
x<br />
y<br />
y<br />
z<br />
y<br />
z<br />
x<br />
z<br />
cos( θ ) cos( θ )]<br />
x<br />
z<br />
Raccogliendo si ottiene:<br />
U<br />
1<br />
=<br />
2<br />
[ q q q ]<br />
x<br />
y<br />
z<br />
2<br />
⎡ cos ( θ<br />
x<br />
)<br />
⎢<br />
⋅ k⎢cos(<br />
θ<br />
y<br />
)cos( θ<br />
x<br />
)<br />
⎢<br />
⎣<br />
cos( θ<br />
z<br />
)cos( θ<br />
x<br />
)<br />
cos( θ )cos( θ )<br />
x<br />
2<br />
cos ( θ )<br />
cos( θ )cos( θ )<br />
z<br />
y<br />
y<br />
y<br />
cos( θ ⎤<br />
x<br />
)cos( θ<br />
z<br />
) ⎡q<br />
⎥<br />
cos( θ ⋅<br />
⎢<br />
y<br />
)cos( θ<br />
z<br />
) ⎥ ⎢<br />
q<br />
2<br />
cos ( θ ⎥<br />
⎦<br />
⎢<br />
z<br />
) ⎣q<br />
x<br />
y<br />
z<br />
⎤<br />
⎥<br />
⎥<br />
⎥⎦<br />
(2.36)<br />
Il termine raccolto tra i due vettori <strong>di</strong> spostamento rappresenta la matrice <strong>di</strong> rigidezza della molla, e<br />
andrà assemblata ai termini della matrice <strong>di</strong> rigidezza totale corrispondenti ai gra<strong>di</strong> <strong>di</strong> libertà vincolati<br />
dalla molla.<br />
34