Tesi Specializzazion.. - Ingegneria Strutturale - Politecnico di Milano
Tesi Specializzazion.. - Ingegneria Strutturale - Politecnico di Milano
Tesi Specializzazion.. - Ingegneria Strutturale - Politecnico di Milano

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
POLITECNICO DI MILANO<br />
Scuola <strong>di</strong> <strong>Specializzazion</strong>e in<br />
COSTRUZIONE IN CEMENTO ARMATO<br />
“F.lli Pesenti”<br />
MODELLAZIONE TRIDIMENSIONALE DI<br />
STRUTTURE IN C.A. E C.A.P. IN CAMPO NON<br />
LINEARE<br />
Relatore:<br />
Correlatore:<br />
Prof. Franco Bontempi<br />
Ing. Fabio Bion<strong>di</strong>ni<br />
<strong>Tesi</strong> <strong>di</strong> <strong>Specializzazion</strong>e<br />
Ing. Luca Sgambi<br />
Anno Accademico 1999-2000
Oltre al prof. Bontempi ed all’ing. Bion<strong>di</strong>ni che mi hanno seguito in questi due anni <strong>di</strong><br />
permanenza alla scuola “f.lli Pesenti” offrendomi spunti <strong>di</strong> stu<strong>di</strong>o e <strong>di</strong> riflessione su<br />
molteplici argomenti, desidero ringraziare il prof. Malerba per la pazienza e la<br />
<strong>di</strong>sponibilità a <strong>di</strong>scutere i temi che ho trattato in questo lavoro.
In<strong>di</strong>ce<br />
In<strong>di</strong>ce<br />
Cap. 1 Introduzione al metodo degli elementi finiti<br />
I fenomeni fisici 1<br />
Le equazioni <strong>di</strong>fferenziali alle derivate parziali 3<br />
Necessità della risoluzione numerica 6<br />
La formulazione debole per problemi stazionari 8<br />
PSV applicato ad un continuo sud<strong>di</strong>viso in elementi 11<br />
Convergenza del metodo 15<br />
Proprietà delle funzioni <strong>di</strong> forma 16<br />
Cap. 2 Formulazione dell’elemento finito tri<strong>di</strong>mensionale<br />
Formulazione dell’elemento compatibile 17<br />
La rigidezza dell’elemento compatibile 26<br />
L’integrazione selettiva 27<br />
Le funzioni <strong>di</strong> forma incompatibili 32<br />
I vincoli elastici concentrati 34<br />
Deformazioni anelastiche 35<br />
Armatura embedded 36<br />
L’armatura <strong>di</strong>ffusa 39<br />
Cap. 3 Legami costitutivi e problema non lineare<br />
La non linearità <strong>di</strong> materiale<br />
41<br />
Definizione della variabile <strong>di</strong> danno<br />
42<br />
Definizione dello stato <strong>di</strong> sforzo effettivo<br />
44<br />
Ipotesi d’equivalenza nelle deformazioni<br />
45<br />
La legge d’evoluzione <strong>di</strong> Mazars<br />
46<br />
La legge d’evoluzione <strong>di</strong> Cervera<br />
51<br />
La legge d’evoluzione <strong>di</strong> Rizzi<br />
55<br />
La legge d’evoluzione proposta per il modello isotropo<br />
56<br />
Un legame ortotropo 57<br />
Legami costitutivi dell’acciaio 60<br />
Cenni sulla regolarizzazione della risposta non lineare 62<br />
Metodo della secante per la soluzione <strong>di</strong> problemi non lineari 63<br />
_____________________________________________________________________________________________<br />
I
In<strong>di</strong>ce<br />
Cap. 4 Applicazioni in campo elastico lineare 68<br />
Patch Test per l’elemento solido integrato in modo selettivo 69<br />
Patch Test per l’elemento solido con funzioni <strong>di</strong> forma non compatibili 75<br />
Analisi <strong>di</strong> una mensola snella 77<br />
Analisi <strong>di</strong> una trave doppiamente incastrata 81<br />
Stu<strong>di</strong>o della deformabilità trasversale e dell’ingobbimento sezionale <strong>di</strong><br />
un elemento in parete sottile a profilo rettangolare chiuso 92<br />
Patch Test per l’elemento solido con acciaio <strong>di</strong>ffuso 100<br />
Patch Test per l’elemento solido con acciaio embedded 103<br />
Patch Test per l’elemento solido presollecitato 105<br />
Pilastro soggetto a peso proprio 107<br />
Stu<strong>di</strong>o <strong>di</strong> una pila da ponte a profilo misto in campo elastico lineare 109<br />
Cap. 5 Applicazioni in campo elastico non lineare 118<br />
Prove <strong>di</strong> compressione monoassiale 119<br />
Dominio <strong>di</strong> rottura <strong>di</strong> Kupfer 122<br />
Dominio <strong>di</strong> rottura <strong>di</strong> Bresler-Pister 130<br />
Pannello soggetto a taglio puro 131<br />
Trave <strong>di</strong> Bresler-Scordelis 135<br />
Stu<strong>di</strong>o <strong>di</strong> una pila da ponte a profilo misto in campo non lineare 142<br />
Conclusioni 162<br />
Appen<strong>di</strong>ce A : I co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati 164<br />
Appen<strong>di</strong>ce B : Bibliografia 181<br />
_____________________________________________________________________________________________<br />
II
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
Capitolo 1<br />
Introduzione al metodo degli Elementi Finiti<br />
1. I fenomeni fisici<br />
Moltissimi fenomeni fisici, modellati matematicamente assumono l’aspetto <strong>di</strong> una o più equazioni<br />
<strong>di</strong>fferenziali or<strong>di</strong>narie o alle derivate parziali. Solitamente si tratta <strong>di</strong> equazioni la cui soluzione in<br />
forma chiusa riesce solo per geometrie semplici e con drastiche semplificazioni. Si pensi al problema<br />
della torsione <strong>di</strong> una barra alla De Saint Venant, la soluzione in forma chiusa è facile solo se la<br />
sezione della barra è <strong>di</strong> tipo ellittico, per un profilo generico il problema <strong>di</strong>viene estremamente<br />
complicato. Risulta spesso necessario ricorrere a delle soluzioni approssimate.<br />
I fenomeni fisici si possono si possono sud<strong>di</strong>videre schematicamente in stazionari e non stazionari,<br />
per descrivere questi ultimi, l’equazioni che regolano il problema avranno anche una <strong>di</strong>pendenza<br />
dalla variabile temporale.<br />
I fenomeni stazionari più comuni sono regolati dalle seguenti equazioni [L1, L10]:<br />
2<br />
L’equazione armonica K ⋅∇<br />
Φ + Q = 0 che descrive fenomeni <strong>di</strong> trasporto per <strong>di</strong>ffusione come la<br />
trasmissione <strong>di</strong> calore nei soli<strong>di</strong>, il trasporto <strong>di</strong> materia, i moti <strong>di</strong> filtrazione, la deformata <strong>di</strong> una<br />
membrana, la torsione <strong>di</strong> una barra prismatica, il moto <strong>di</strong> un fluido ideale, l’elettrostatica, la<br />
magnetostatica.<br />
2<br />
L’equazione <strong>di</strong> Helmoltz ∇ Φ + λ ⋅ Φ = 0 dove il termine sorgente va sostituito un termine<br />
proporzionale all’incognita cercata. Questa equazione governa fenomeni che possono <strong>di</strong>venire<br />
instabili, per cui il principale problema riguarda il calcolo dei valori critici del parametro λ ≥ 0.<br />
Fenomeni <strong>di</strong> questo genere riguardano, ad esempio, l’instabilità elastica.<br />
1
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
∂ ∂Φ ∂ ∂Φ ∂ ∂Φ<br />
L’equazione quasi armonica ( K<br />
x<br />
⋅ ) + ( K<br />
y<br />
⋅ ) + ( K<br />
z<br />
⋅ ) + Q = 0 definita da un<br />
∂x<br />
∂x<br />
∂y<br />
∂y<br />
∂z<br />
∂z<br />
coefficiente K <strong>di</strong>verso nelle <strong>di</strong>rezioni x, y, z. Equazioni <strong>di</strong> questo genere riguardano, ad esempio, la<br />
trasmissione <strong>di</strong> calore in un mezzo ortotropo e la lubrificazione con moto laminare (equazione <strong>di</strong><br />
Reynolds).<br />
4<br />
L’equazione biarmonica K ⋅∇<br />
Φ + Q = 0 che regola, ad esempio, il problema degli elementi<br />
inflessi, travi e piastre, ma anche i problemi <strong>di</strong> elasticità piana, scritti assumendo come incognita la<br />
funzione <strong>di</strong> Airy.<br />
I fenomeni non stazionari più comuni si stu<strong>di</strong>ano a partire dall’equazione armonica, aggiungendo o la<br />
derivata prima temporale o la derivata seconda.<br />
Equazioni con la derivata prima temporale K ⋅∇<br />
2<br />
∂Φ<br />
Φ + Q = b ⋅<br />
∂t<br />
regolano una serie <strong>di</strong> fenomeni<br />
transitori (b è definito come il termine <strong>di</strong> immagazzinamento) quali il transitorio termico, il flusso <strong>di</strong><br />
Blasius (comportamento <strong>di</strong> un fluido in un mezzo seminfinito soggetto ad un movimento della base<br />
su cui si appoggia), il consolidamento <strong>di</strong> un terreno, l’equazione <strong>di</strong> Schro<strong>di</strong>nger (moto libero <strong>di</strong> una<br />
particella in meccanica quantistica).<br />
Equazioni con la derivata seconda temporale<br />
2<br />
2 ∂ Φ ∂Φ<br />
⋅∇<br />
Φ + Q = µ ⋅ + h ⋅ + f<br />
∂t<br />
∂t<br />
K<br />
2<br />
rappresentano numerosi fenomeni fisici quali, la propagazione <strong>di</strong> onde longitu<strong>di</strong>nali in una barra, la<br />
propagazione <strong>di</strong> onde acustiche, la propagazione <strong>di</strong> onde superficiali in acque poco profonde, la<br />
propagazione <strong>di</strong> onde elettromagnetiche in un <strong>di</strong>elettrico.<br />
⋅ Φ<br />
2
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
2. Le equazioni <strong>di</strong>fferenziali alle derivate parziali<br />
Le equazioni viste in precedenza, sono equazioni del secondo or<strong>di</strong>ne, intendendosi per or<strong>di</strong>ne quello<br />
della derivata massima che vi compare. Ad esempio, un’equazione del secondo or<strong>di</strong>ne ad un solo<br />
2 2 2<br />
∂Φ ∂Φ ∂ Φ ∂ Φ ∂ Φ<br />
parametro incognito e due variabili in<strong>di</strong>pendenti è del tipo F ( x,<br />
y,<br />
Φ,<br />
, , , , ) = 0 .<br />
2<br />
2<br />
∂x<br />
∂y<br />
∂x<br />
∂x∂y<br />
∂y<br />
La possibilità <strong>di</strong> descrivere un fenomeno fisico con una equazione alle derivate parziali, è legata alla<br />
possibilità <strong>di</strong> determinare univocamente una particolare soluzione fra le infinite che ne costituiscono<br />
l’integrale generale [L1, L21]. Ciò è possibile se all’integrale generale vengono imposte opportune<br />
con<strong>di</strong>zioni restrittive relative al comportamento della soluzione sulla frontiera del dominio. Per<br />
problemi stazionari Φ deve sod<strong>di</strong>sfare a con<strong>di</strong>zioni al contorno <strong>di</strong> tipo essenziale e <strong>di</strong> tipo naturale.<br />
S 1<br />
A : ∇ 2 Φ =<br />
f<br />
n<br />
S 2<br />
Figura 1.1: Con<strong>di</strong>zioni al contorno.<br />
Se 2m è il massimo or<strong>di</strong>ne <strong>di</strong> derivazione nell’equazione <strong>di</strong>fferenziale, le con<strong>di</strong>zioni essenziali (<strong>di</strong><br />
Dirichlet) si applicano al contorno (S 1 ) sulle derivate <strong>di</strong> or<strong>di</strong>ne r, con 0 ≤ r ≤ m , della funzione<br />
incognita; le con<strong>di</strong>zioni <strong>di</strong> tipo naturale (<strong>di</strong> Neumann o <strong>di</strong> tipo convettivo) si applicano invece su (S 2 )<br />
alle derivate <strong>di</strong> or<strong>di</strong>ne p, con m ≤ p ≤ 2m<br />
.<br />
Problema in stato piano <strong>di</strong> sforzo 2m = 2<br />
Problema <strong>di</strong> elemento inflesso 2m = 4<br />
3
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
Come esempio si esamini il problema <strong>di</strong> un’asta tesa.<br />
F<br />
l<br />
Figura 1.2: Asta tesa.<br />
2<br />
d u<br />
L’equazione che governa il fenomeno è EA = p . Le con<strong>di</strong>zioni al contorno si pongono in x = 0,<br />
2<br />
dx<br />
ed un x = l, essendo il contorno dell’asta rappresentato da soli questi due punti. In x = 0 si dovranno<br />
porre delle con<strong>di</strong>zioni al contorno <strong>di</strong> tipo essenziale:<br />
u = 0<br />
Con<strong>di</strong>zioni <strong>di</strong> Dirichlet<br />
x=0<br />
In x = l si dovranno porre delle con<strong>di</strong>zioni al contorno <strong>di</strong> tipo naturale:<br />
du<br />
EA<br />
dx<br />
x=<br />
l<br />
= F<br />
Con<strong>di</strong>zioni <strong>di</strong> Neumann<br />
Problemi in cui tutto il contorno è vincolato ad assumere valori essenziali o naturali sono definiti<br />
problemi dei valori al contorno. A seconda del tipo <strong>di</strong> equazione e delle con<strong>di</strong>zioni al contorno, il<br />
problema può non avere soluzione, avere una soluzione, più soluzioni, infinite soluzioni.<br />
Per i problemi non stazionari si deve imporre anche una con<strong>di</strong>zione ai valori iniziali sulla funzione<br />
incognita, si avranno quin<strong>di</strong> con<strong>di</strong>zioni miste, sia al contorno che iniziali. Poiché le equazioni non<br />
stazionarie, ammettono soluzioni che evolvono nel tempo ed il loro comportamento ad un certo<br />
istante è determinato da quello relativo agli istanti precedenti, un problema dei valori al contorno che<br />
prescrive arbitrariamente la soluzione in più istanti separati non è fisicamente ammissibile.<br />
4
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
Sia L() un operatore <strong>di</strong>fferenziale, limitandoci ad una generica equazioni <strong>di</strong> second’or<strong>di</strong>ne lineare<br />
con due variabili in<strong>di</strong>pendenti, si può porre:<br />
2<br />
2<br />
2<br />
∂ Φ ∂ Φ ∂ Φ ∂Φ ∂Φ<br />
L ( Φ)<br />
= a ⋅ + b ⋅ + c ⋅ + d ⋅ + e ⋅ + f ⋅ Φ = g<br />
(1.1)<br />
2<br />
2<br />
∂x<br />
∂x∂y<br />
∂y<br />
∂x<br />
∂y<br />
una classificazione matematica delle EDP si effettua sul segno del <strong>di</strong>scriminante ∆ = b 2 – 4ac, si ha<br />
infatti:<br />
se ∆ < 0<br />
se ∆ = 0<br />
se ∆ > 0<br />
l’equazione si <strong>di</strong>ce ellittica<br />
l’equazione si <strong>di</strong>ce parabolica<br />
l’equazione si <strong>di</strong>ce iperbolica<br />
2 2<br />
∂ ∂<br />
I problemi stazionari sono retti da equazioni <strong>di</strong> tipo ellittico, L()<br />
= + ; esempio <strong>di</strong> un<br />
2 2<br />
∂x<br />
∂y<br />
problema parabolico è l’equazione del calore in un transitorio termico (con derivata prima<br />
2<br />
∂ ∂<br />
temporale), L() = −k<br />
⋅ + ; esempio <strong>di</strong> un problema iperbolico è la propagazione <strong>di</strong> onde lungo<br />
2<br />
∂x<br />
∂t<br />
2 2<br />
2 ∂ ∂<br />
una barra L()<br />
= −c<br />
⋅ + . Si <strong>di</strong>mostra (eseguendo dei cambi <strong>di</strong> variabile) che un’equazione<br />
2 2<br />
∂x<br />
∂t<br />
iperbolica possiede due famiglie <strong>di</strong> linee caratteristiche (linee sulle quali si propaga un’eventuale<br />
<strong>di</strong>scontinuità della soluzione), un’equazione parabolica ha solo una famiglia <strong>di</strong> linee caratteristiche,<br />
un’equazione ellittica non ha linee caratteristiche. Non avendo linee caratteristiche, i problemi<br />
associati ad un operatore ellittico (esempio asta in trazione, membrana…) non possono avere<br />
soluzioni <strong>di</strong>scontinue.<br />
5
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
3. Necessità della risoluzione numerica<br />
In generale, non è possibile ricavare per via analitica una soluzione dalla (1.1). I meto<strong>di</strong> <strong>di</strong><br />
integrazione analitica <strong>di</strong>sponibili (trasformate <strong>di</strong> Fourier e <strong>di</strong> Laplace, sviluppo in serie <strong>di</strong><br />
autofunzioni, separazione delle variabili) sono <strong>di</strong> limitata apllicabilità. Peraltro, anche nel caso che si<br />
conoscesse l’integrale generale, non è poi detto che si riesca a determinare un integrale particolare.<br />
Per ottenere quest’ultimo bisogna infatti assegnare opportune con<strong>di</strong>zioni sulla soluzione (e/o sulle<br />
sue derivate) sulla frontiera del dominio.<br />
Da ciò segue l’importanza <strong>di</strong> <strong>di</strong>sporre <strong>di</strong> meto<strong>di</strong> numerici che permettano <strong>di</strong> costruire<br />
un’approssimazione<br />
Φ<br />
n<br />
della soluzione esatta Φ e <strong>di</strong> valutare, in una qualche norma, l’errore<br />
Φ n<br />
− Φ che si commette sostituendo alla soluzione esatta quella approssimata. L’intero positivo N<br />
denota la <strong>di</strong>mensione (finita) del problema approssimato.<br />
Vi sono vari meto<strong>di</strong> utilizzati per la risoluzione numerica <strong>di</strong> una EDP. Molto comune è il metodo<br />
delle <strong>di</strong>fferenze finite che approssima l’equazione <strong>di</strong>fferenziale me<strong>di</strong>ante <strong>di</strong>fferenze finite, lasciando<br />
il sistema continuo. I svantaggi del metodo delle <strong>di</strong>fferenze finite si avvertono nell’approssimazione<br />
<strong>di</strong> un dominio bi<strong>di</strong>mensionale, che può avvenire solamente in modo rozzo con celle quadrate, ed<br />
all’atto dell’imposizione delle con<strong>di</strong>zioni al contorno sulle derivate, che richiedono l’introduzione<br />
artificiosa <strong>di</strong> altri no<strong>di</strong>. Il metodo degli elementi finiti è il duale del metodo delle <strong>di</strong>fferenze finite, nel<br />
senso che mentre il secondo approssima le equazioni <strong>di</strong>fferenziali applicate al continuo intatto, il<br />
primo <strong>di</strong>scretezza il continuo a cui applica le equazioni esatte. L’utilizzo <strong>di</strong> elementi <strong>di</strong>storti porta ad<br />
una approssimazione molto precisa delle frontiere, inoltre applicando le equazioni esatte in forma<br />
variazionale, le con<strong>di</strong>zioni al contorno naturali sono automaticamente sod<strong>di</strong>sfatte, e quelle essenziali<br />
si impongono all’atto della soluzione del sistema. Il metodo delle <strong>di</strong>fferenze finite torna utile nei<br />
problemi non stazionari, (sia parabolici che iperbolici) dove le equazioni <strong>di</strong>fferenziali vengono<br />
approssimate col metodo delle <strong>di</strong>fferenze finite nella variabile temporale (meto<strong>di</strong> <strong>di</strong> Eulero per le<br />
equazioni paraboliche, meto<strong>di</strong> <strong>di</strong> Newmark per le equazioni iperboliche).<br />
Un secondo metodo <strong>di</strong> risoluzione numerica <strong>di</strong> una EDP è il metodo <strong>di</strong> Rayleigh-Ritz. Questo<br />
metodo, come il metodo degli Elementi Finiti, risolve la EDP minimizzando il funzionale ad essa<br />
associata (se ne <strong>di</strong>scuterà nel prossimo paragrafo).<br />
6
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
La variabile Φ viene approssimata con una combinazione lineare <strong>di</strong> funzioni note N i e parametri<br />
incogniti<br />
Φ<br />
i<br />
Φ =<br />
n<br />
∑ N i<br />
i=<br />
1<br />
⋅ Φ<br />
i<br />
(1.2)<br />
le funzioni N i devono essere scelte in modo da sod<strong>di</strong>sfare le con<strong>di</strong>zioni essenziali nell’intero dominio<br />
del sistema. Sostituita la funzione approssimata nel funzionale, se impone la stazionarietà. Ne risulta<br />
un sistema <strong>di</strong> n equazioni nelle n incognite<br />
Φ<br />
i<br />
.<br />
⎡<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
∂Π<br />
∂Φ<br />
1<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⋮ ⎥ = 0 → K ⋅ Φ = F<br />
(1.3)<br />
⎥<br />
⎥<br />
∂Π ⎥<br />
∂Φ<br />
⎥<br />
n ⎦<br />
Poiché questo metodo richiede che nella scelta delle funzioni interpolanti siano sod<strong>di</strong>sfatte le<br />
con<strong>di</strong>zioni essenziali nell’intero dominio, il metodo <strong>di</strong> Rayleigh-Ritz trova applicazione soltanto con<br />
geometrie particolarmente semplici (ad esempio nello stu<strong>di</strong>o dell’instabilità per imbozzamento <strong>di</strong><br />
lastre rettangolari).<br />
Il metodo degli elementi finiti è una sottoclasse del metodo <strong>di</strong> Rayleigh-Ritz, in cui le funzioni<br />
interpolanti N i sono definite non nell’intero dominio A, ma in sottodomini Ae, detti elementi finiti,<br />
ottenuti per <strong>di</strong>scretizzazione <strong>di</strong> A. In questo modo si supera lo svantaggio del metodo <strong>di</strong> Rayleigh-<br />
Ritz, che era limitato a domini <strong>di</strong> forma semplice. Il metodo degli Elementi Finiti fu introdotto per la<br />
prima volta dal prof. Turner nel 1956 per l’analisi <strong>di</strong> problemi <strong>di</strong> elasticità piana come sviluppo del<br />
calcolo matriciale.<br />
7
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
4. La formulazione debole per problemi stazionari<br />
La formulazione forte (formulazione <strong>di</strong>fferenziale) non è in genere adeguata, alla ricerca della<br />
soluzione fisica del problema per l’elevato or<strong>di</strong>ne <strong>di</strong> derivazione richiesto. Come esempio si<br />
consideri l’equazione <strong>di</strong> un filo elastico. Questa ricavata considerando il carico <strong>di</strong>stribuito su tutta la<br />
linea (equazione della linea funicolare), se ho un carico concentrato la soluzione fisica esiste, ma non<br />
è soluzione del modello matematico assunto (la soluzione è continua ma non derivabile con<br />
continuità). Serve una formulazione alternativa che consenta <strong>di</strong> ridurre l’or<strong>di</strong>ne <strong>di</strong> derivazione<br />
richiesto alla funzione incognita. Tramite una serie <strong>di</strong> passaggi matematici (tra cui la moltiplicazione<br />
per una funzione test ed un’integrazione per parti) si passa da un problema <strong>di</strong>fferenziale <strong>di</strong> or<strong>di</strong>ne 2m<br />
ad uno in forma integrale <strong>di</strong> or<strong>di</strong>ne m. Questo problema viene definito come formulazione debole del<br />
problema <strong>di</strong>fferenziale. Ad esempio il problema del filo elastico in formulazione forte:<br />
2<br />
d Φ<br />
− =<br />
2<br />
dx<br />
w(0)<br />
= 0<br />
f ( x)<br />
per<br />
Φ(<br />
l)<br />
= 1<br />
0 < x < l<br />
viene ricondotto alla formulazione debole: cercare Φ nello spazio V tale che<br />
l<br />
l<br />
⎡1<br />
dv<br />
⎤<br />
2<br />
J ( Φ)<br />
= min J ( v)<br />
= min⎢<br />
∫ ( ) dx − ∫ v ⋅ fdx⎥<br />
per ogni v (funzione test) appartenente allo spazio V.<br />
⎣2<br />
dx<br />
0 0 ⎦<br />
se Φ è soluzione del problema variazionale, allora la formulazione forte è equivalente alla debole.<br />
Bisogna definire ora qual è lo spazio in cui si cerca la soluzione. Dato che si deve integrare una<br />
funzione derivata m volte, si potrebbe imporre che V sia lo spazio C m (derivabile con continuità sino<br />
all’or<strong>di</strong>ne m) tuttavia si è visto che la derivata <strong>di</strong> or<strong>di</strong>ne m può non essere continua. Se m è l’or<strong>di</strong>ne<br />
<strong>di</strong> derivazione presente nel problema variazionale, si <strong>di</strong>mostra che lo spazio V in cui cercare la<br />
soluzione è lo spazio <strong>di</strong> Sobolev H m . A <strong>di</strong>fferenza dello spazio C m , spazio delle funzioni continue con<br />
derivata continua sino all’or<strong>di</strong>ne m, lo spazio H m contiene anche le funzioni continue ma con derivata<br />
<strong>di</strong> or<strong>di</strong>ne m non continua in un numero finito <strong>di</strong> punti [L10].<br />
8
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
Nel caso <strong>di</strong> problemi <strong>di</strong> elasticità il funzionale da minimizzare sarà l’energia potenziale elastica, e lo<br />
spazio delle funzioni test V, racchiude tutte le funzioni <strong>di</strong> spostamento ammissibili.<br />
Si può infatti <strong>di</strong>mostrare che:<br />
tra tutti i campi <strong>di</strong> spostamento ammissibili, quello che sod<strong>di</strong>sfa le con<strong>di</strong>zioni <strong>di</strong> equilibrio rende<br />
l’energia potenziale del sistema stazionaria e minima.<br />
Da questo principio, <strong>di</strong>scendono meto<strong>di</strong> <strong>di</strong> soluzione algebrica, per problemi <strong>di</strong> elasticità, che<br />
interpolano la funzione spostamento, da cui il nome <strong>di</strong> metodo degli spostamenti.<br />
Si possono formulare meto<strong>di</strong> basati sulla stazionarietà <strong>di</strong> altri funzionali. Se il principio <strong>di</strong> minima<br />
energia potenziale, permetteva <strong>di</strong> ottenere una formulazione variazionale che determina la rigidezza<br />
<strong>di</strong> un sistema, il principio <strong>di</strong> minima energia complementare ne determina la flessibilità.<br />
Π<br />
p<br />
=<br />
1<br />
2<br />
∫<br />
V<br />
ε<br />
T<br />
⋅ D ⋅ε<br />
⋅ dV −<br />
∫<br />
V<br />
s<br />
T<br />
⋅ F ⋅ dV −<br />
∫<br />
Γf<br />
s<br />
T<br />
⋅ f<br />
⋅ dΓ<br />
(EPT) (1.4)<br />
Π<br />
c<br />
=<br />
1<br />
2<br />
∫<br />
V<br />
σ<br />
T<br />
⋅ D<br />
−1<br />
⋅σ<br />
⋅ dV −<br />
∫<br />
Γf<br />
f<br />
T<br />
⋅t<br />
⋅ dΓ<br />
(ECT) (1.5)<br />
Il principio afferma che:<br />
tra tutti gli stati tensionali che sod<strong>di</strong>sfano le con<strong>di</strong>zioni <strong>di</strong> equilibrio all’interno del sistema e le<br />
tensioni imposte sul contorna, lo stato <strong>di</strong> tensione che sod<strong>di</strong>sfa anche la congruenza rende<br />
stazionaria e minima l’energia complementare totale.<br />
Da questo principio <strong>di</strong>scende il metodo delle forze. Pensando ad una soluzione automatizzata, si fa<br />
notare che si ottiene un metodo più complesso e meno intuitivo, rispetto al metodo degli spostamenti.<br />
Infatti, anche se il calcolo delle tensioni risulta più accurato, la costruzione <strong>di</strong> un modello <strong>di</strong> forze<br />
equilibrato, è molto più complicato rispetto ad una costruzione <strong>di</strong> un modello <strong>di</strong> spostamenti<br />
compatibile.<br />
9
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
Mostriamo ora per il caso <strong>di</strong> una mensola su <strong>di</strong> un terreno elastico che la formulazione debole<br />
equivale alla formulazione forte. L’equazione <strong>di</strong>fferenziale della trave è data da:<br />
EJw<br />
IV<br />
− p + k<br />
f<br />
w = 0<br />
dove con w si è in<strong>di</strong>cato lo spostamento trasversale della trave, con p un carico <strong>di</strong>stribuito e con K f la<br />
costante <strong>di</strong> sottofondo. Le con<strong>di</strong>zioni essenziali si impongono su w e w I al contorno vincolato<br />
cinematicamente. L’energia potenziale è somma dell’energia <strong>di</strong> deformazione elastica della trave e<br />
delle molle che schematizzano il terreno meno il lavoro dei carichi esterni:<br />
Π(<br />
w)<br />
=<br />
l<br />
∫<br />
EJ<br />
2<br />
k<br />
w<br />
l 2 l<br />
II 2<br />
f<br />
( w ) dx + ∫ dx − ∫ pwdx<br />
2<br />
0 0<br />
0<br />
Per minimizzare il funzionale si impone che la variazione prima sia nulla:<br />
l<br />
II II<br />
( EJw δw<br />
+ k wδw<br />
− p )<br />
δ Π( w)<br />
= ∫ f<br />
δw dx = 0<br />
0<br />
Si integra ora per parti l’energia flessionale, tenendo presente che δw II = δ(δw I ) I<br />
l<br />
II II<br />
II I<br />
l<br />
∫ EJw δ w dx = EJw δw<br />
−<br />
0 ∫<br />
0<br />
l<br />
0<br />
EJw<br />
III<br />
δw<br />
I<br />
dx<br />
e si integra ancora per parti l’ultimo termine della<br />
l<br />
III I<br />
III<br />
l<br />
∫ EJw δ w dx = EJw δw<br />
−<br />
0 ∫<br />
0<br />
l<br />
0<br />
EJw<br />
IV<br />
δwdx<br />
10
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
si ottiene che<br />
l<br />
∫<br />
0<br />
II<br />
EJw δw<br />
II<br />
l<br />
dx = ∫ EJw<br />
0<br />
IV<br />
δwdx<br />
+<br />
II I<br />
EJw δw<br />
l<br />
0<br />
−<br />
EJw<br />
III<br />
δw<br />
l<br />
0<br />
la variazione prima <strong>di</strong>viene quin<strong>di</strong>:<br />
l<br />
IV<br />
II I<br />
l<br />
III<br />
l<br />
∫ ( EJw − p + k<br />
f<br />
w) δ wdx + EJw δw<br />
− EJw δw<br />
= 0<br />
0<br />
0<br />
0<br />
Essendo ora la variazione dw arbitraria, ed ipotizzando che le con<strong>di</strong>zioni essenziali siano <strong>di</strong> incastro<br />
all’estremo x = 0 (le variazioni per x = 0 devono quin<strong>di</strong> essere nulle) si ottengono le equazioni:<br />
EJw<br />
IV<br />
− p + k<br />
f<br />
w = 0<br />
equazione <strong>di</strong>fferenziale <strong>di</strong> equilibrio<br />
II<br />
III<br />
EJw = 0 EJw = 0 con<strong>di</strong>zioni al contorno naturali<br />
l<br />
l<br />
5. PSV applicato ad un continuo sud<strong>di</strong>viso in elementi<br />
Occupiamoci ora della meccanica del continuo ed applichiamo il principio degli spostamenti virtuali<br />
ad un continuo sud<strong>di</strong>viso in elementi. Consideriamo il generico elemento ‘e’:<br />
e<br />
S f,e<br />
S s,e<br />
S i,e<br />
Figura 1.3: Divisione <strong>di</strong> un continuo in elementi finiti<br />
11
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
L’elemento possiede in generale un tratto <strong>di</strong> superficie S s,e in cui sono applicate le con<strong>di</strong>zioni al<br />
contorno essenziali, un tratto S f,e in cui sono applicate le con<strong>di</strong>zioni al contorno naturali, ed un tratto<br />
S i,e in comune con gli altri elementi (superficie d’interfaccia).<br />
Il funzionale energia potenziale elastica per l’elemento ‘e’ si scrive:<br />
Π<br />
p<br />
∫<br />
∫<br />
∫<br />
( s)<br />
= ε ⋅σ<br />
dV − s ⋅ F dV − s ⋅ f dS − s ⋅ f dS − s ⋅t<br />
dS<br />
(1.6)<br />
Ve<br />
T<br />
Ve<br />
T<br />
Sf , e<br />
T<br />
∫<br />
Ss,<br />
e<br />
T<br />
∫<br />
Si,<br />
e<br />
T<br />
Dove t sono le tensioni interelementari, f le reazioni vincolari, f le forze <strong>di</strong> superficie, F le forze <strong>di</strong><br />
volume. Nella classe delle soluzioni congruenti, il funzionale Π p (s) è stazionario in corrispondenza <strong>di</strong><br />
una soluzione equilibrata. La stazionarietà viene imposta imponendo che sia nulla la variazione delle<br />
funzionale per una variazione congruente δs:<br />
∫<br />
Ve<br />
T<br />
∫<br />
∫<br />
δ ε ⋅σ<br />
dV = δ s ⋅ F dV + δ s ⋅ f dS + δ s ⋅ f dS + δ s ⋅ t dS<br />
(1.7)<br />
Ve<br />
T<br />
Sf , e<br />
T<br />
∫<br />
Ss,<br />
e<br />
T<br />
∫<br />
Si,<br />
e<br />
T<br />
Dovendo la variazione verificare la congruenza, δ s = 0 sul contorno dove si impongono le con<strong>di</strong>zioni<br />
essenziali (S s ,e) per cui il terzo integrale a secondo membro della (1.7) deve essere nullo. La<br />
continuità del campo <strong>di</strong> spostamenti richiede inoltre che non vi siano lacerazioni e compenetrazioni<br />
tra gli elementi (δs e s sono gli stessi sulla superficie d’interfaccia per elementi a<strong>di</strong>acenti).<br />
Sommando sui vari elementi:<br />
∑ ∫<br />
e<br />
Ve<br />
T<br />
∑ ∫<br />
∑ ∫<br />
δ ε ⋅σ<br />
dV = δ s ⋅ F dV + δ s ⋅ f dS + δ s ⋅t<br />
dS<br />
(1.8)<br />
e<br />
Ve<br />
T<br />
e<br />
Sf , e<br />
T<br />
∑ ∫<br />
e<br />
Si,<br />
e<br />
T<br />
ma dato che le forze interelementari tra un elemento ed il suo a<strong>di</strong>acente sono uguali in modulo ed<br />
opposte in segno per il principio <strong>di</strong> azione e reazione, e che gli spostamenti dell’interfaccia devono<br />
essere continui, la somma del lavoro delle forze interelementari risulta nullo.<br />
12
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
∑ ∫<br />
e Si,<br />
e<br />
T<br />
δ s ⋅t<br />
dS ≡ 0 (ipotesi <strong>di</strong> continuità degli spostamenti sull’interfaccia) (1.9)<br />
L’equazione si riduce quin<strong>di</strong> a:<br />
∑ ∫<br />
e<br />
Ve<br />
T<br />
∑ ∫<br />
T<br />
∑ ∫<br />
δ ε ⋅σ<br />
dV = δ s ⋅ F dV + δ s ⋅ f dS<br />
(1.10)<br />
e Ve<br />
e Sf , e<br />
T<br />
Si assumono ora come incognite gli spostamenti in un numero finito <strong>di</strong> punti, detti ‘no<strong>di</strong>’. Questi<br />
punti formano un reticolo che sud<strong>di</strong>vidono la struttura in un numero finito <strong>di</strong> elementi. Gli<br />
spostamenti all’interno degli elementi vengono espressi me<strong>di</strong>ante interpolazione degli spostamenti<br />
nodali corrispondenti all’elemento (S).<br />
s = N ⋅ S<br />
(1.11)<br />
ε = L(<br />
s)<br />
= L(<br />
N)<br />
⋅ S = B ⋅ S<br />
(1.12)<br />
σ = D ⋅ε<br />
= ( D ⋅ B)<br />
⋅ S = E ⋅ S<br />
(1.13)<br />
Dove N è la matrice delle funzioni <strong>di</strong> forma, B è la matrice <strong>di</strong> congruenza interna dell’elemento, D<br />
è la matrice delle costanti elastiche ed L () è un operatore <strong>di</strong> congruenza che lega gli spostamenti alle<br />
deformazioni, la sua forma <strong>di</strong>pende dal tipo <strong>di</strong> problema in esame. Le quantità <strong>di</strong> sinistra <strong>di</strong>pendono<br />
dalla posizione all’interno dell’elemento tramite le matrici N , B , E in cui vi è la <strong>di</strong>pendenza dalle<br />
coor<strong>di</strong>nate. Il vettore S raccoglie le incognite nodali. Lo spostamento è stato interpolato tramite delle<br />
funzioni <strong>di</strong> forma che <strong>di</strong>pendono strettamente dal tipo <strong>di</strong> elemento finito usato. La variazione è:<br />
δ ε = B ⋅δ S<br />
(1.14)<br />
13
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
per cui la (1.8) si può scrivere come:<br />
∑ ∫<br />
e<br />
Ve<br />
T<br />
T<br />
∑ ∫<br />
T<br />
T<br />
δ S ⋅ B ⋅ D ⋅ B ⋅ S dV = δ S ⋅ N ⋅ F dV + δ S ⋅ N ⋅ f dS<br />
(1.15)<br />
∑ ∫<br />
e Ve<br />
e Sf , e<br />
T<br />
T<br />
portando i vettori delle incognite nodali fuori dagli integrali si ottiene:<br />
T<br />
∑ ∫<br />
T<br />
∑ ∫<br />
T<br />
δ S ⋅ B ⋅ D ⋅ B dV ⋅ S = δ S ⋅ N ⋅ F dV + δ S ⋅ N ⋅ f dS<br />
(1.16)<br />
e<br />
Ve<br />
T<br />
∑ ∫<br />
e Ve<br />
e Sf , e<br />
T<br />
T<br />
dovendo questa essere verificata per una generica variazione, deve essere:<br />
∑ ∫<br />
e<br />
Ve<br />
B<br />
T<br />
⋅ D ⋅ B<br />
dV ⋅ S =<br />
∑ ∫<br />
N<br />
T<br />
⋅ F<br />
dV +<br />
∑ ∫<br />
e Ve<br />
e Sf , e<br />
N<br />
T<br />
⋅ f<br />
dS<br />
(1.17)<br />
Interpretando le sommatorie come l’operazione <strong>di</strong> assemblaggio, si giunge al sistema lineare:<br />
K ⋅ S = F + f<br />
(1.18)<br />
t<br />
t<br />
t<br />
t<br />
dove S t raccoglie tutti gli spostamenti incogniti, K t è la matrice <strong>di</strong> rigidezza totale, F t e f t sono le forze<br />
nodali equivalenti totali.<br />
∑<br />
∑ ∫<br />
K = K = B ⋅ D ⋅ B dV<br />
(1.19)<br />
t<br />
e<br />
e<br />
e<br />
Ve<br />
T<br />
∑<br />
∑ ∫<br />
F = F = N ⋅ F dV<br />
(1.20)<br />
t<br />
e<br />
e<br />
e<br />
Ve<br />
T<br />
f<br />
t<br />
=<br />
∑<br />
e<br />
f<br />
e<br />
=<br />
∑ ∫<br />
e<br />
Sf , e<br />
N<br />
T<br />
⋅ f<br />
dS<br />
(1.21)<br />
Ogni elemento finito possiede le sue particolari matrici.<br />
14
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
6. Convergenza del metodo<br />
I criteri <strong>di</strong> convergenza del metodo degli elementi finiti sono stati formulati da Bazeley nel 1967.<br />
Con<strong>di</strong>zione necessaria perché si abbia convergenza è che le funzioni <strong>di</strong> forma assunte sod<strong>di</strong>sfino il<br />
requisito <strong>di</strong> completezza. Se il massimo or<strong>di</strong>ne <strong>di</strong> derivazione nel funzionale è m, le funzioni <strong>di</strong><br />
forma devono essere dei polinomi completi <strong>di</strong> grado m. Questo perché l’elemento deve poter<br />
rappresentare stati <strong>di</strong> deformazione costante e stati <strong>di</strong> deformazione nulla (moti rigi<strong>di</strong>).<br />
Nel caso <strong>di</strong> elementi <strong>di</strong> lastra (stato piano <strong>di</strong> sforzo), il massimo or<strong>di</strong>ne <strong>di</strong> derivazione nel funzionale<br />
è 1, per cui è sufficiente un polinomio <strong>di</strong> tipo u<br />
α + α ⋅ x + ⋅ y , v α + α ⋅ x + ⋅ y<br />
=<br />
1 2<br />
α<br />
3<br />
=<br />
4 5<br />
α<br />
6<br />
E’ chiaro che lo stato <strong>di</strong> deformazione costante è sicuramente rappresentato, essendo le funzioni<br />
spostamento lineari e complete. I moti <strong>di</strong> traslazione nei versi coor<strong>di</strong>nati vengono rappresentati si<br />
hanno quando α<br />
2<br />
= α<br />
3<br />
= α<br />
5<br />
= α<br />
6<br />
= 0 , i moti rotatori quandoα 1<br />
= α<br />
2<br />
= α<br />
4<br />
= α<br />
6<br />
= 0 e α<br />
3<br />
= −α<br />
5<br />
.<br />
Se alla completezza viene aggiunta la con<strong>di</strong>zione <strong>di</strong> compatibilità (o conformità) si <strong>di</strong>mostra che la<br />
convergenza è assicurata in modo monotono. Per avere compatibilità vi deve essere continuità C m<br />
all’interno dell’elemento e continuità C m-1 all’interfaccia tra due elementi. Per problemi <strong>di</strong> elasticità<br />
piana sono sufficienti funzioni con continuità C 1 all’interno e C 0 all’interfaccia, nel caso <strong>di</strong> elementi<br />
inflessi però il requisito sale a C 2 all’interno e C 1 all’interfaccia, con<strong>di</strong>zione abbastanza facile da<br />
rispettare nel caso <strong>di</strong> elementi tipo trave, più <strong>di</strong>fficile per elementi <strong>di</strong> tipo piastra o guscio.<br />
Per un elemento compatibile e completo la convergenza è assicurata in modo monotono. Inoltre se si<br />
esamina un parametro nodale avente una sorgente concentrata (forza concentrata) nello stesso nodo,<br />
la convergenza risulta dal basso. Se la sorgente è <strong>di</strong> tipo <strong>di</strong>ffuso (forze <strong>di</strong> volume), la convergenza è<br />
sempre monotona, ma può avvenire dal basso o dall’alto senza regole precise.<br />
La completezza è una caratteristica essenziale per una corretta scelta delle funzioni interpolanti. La<br />
compatibilità può in parte venire <strong>di</strong>sattesa, senza pregiu<strong>di</strong>care la convergenza del metodo. Elementi<br />
incompatibili si usano, ad esempio, nell’analisi <strong>di</strong> piastre e gusci (elementi ACM, BCIZ). Questi<br />
elementi vanno sottoposti al cosiddetto Patch-Test: un’indagine per verificare la convergenza <strong>di</strong> un<br />
elemento introdotta per la prima volta dal prof. Irons [L1, L5, L10, L11]. Se la con<strong>di</strong>zione <strong>di</strong><br />
completezza è verificata per il singolo elemento, non è detto, infatti, che lo sia anche per gli elementi<br />
assemblati.<br />
15
Introduzione al metodo degli Elementi Finiti Cap. 1<br />
Il Patch-Test consiste nel sottoporre una maglia non regolare <strong>di</strong> pochi elementi con almeno un nodo<br />
interno ad uno stato <strong>di</strong> deformazione noto e verificare la bontà del risultato.<br />
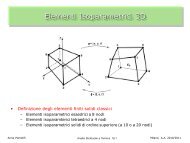
7. Proprietà delle funzioni <strong>di</strong> forma.<br />
Gli elementi finiti hanno una forma che <strong>di</strong>pende dal problema da esaminare. Elementi<br />
mono<strong>di</strong>mensionali vengono usati per problemi con una sola variabile in<strong>di</strong>pendente; elementi<br />
bi<strong>di</strong>mensionali, <strong>di</strong> forma triangolare e quadrangolare, per problemi con 1 o 2 variabili in<strong>di</strong>pendenti<br />
(piastre o lastre); elementi tri<strong>di</strong>mensionali, <strong>di</strong> forma tetraedrica, prismatica ed esaedrica, per problemi<br />
con 3 variabili in<strong>di</strong>pendenti. Gli elementi sono collegati tra loro in punti particolari, detti no<strong>di</strong>.<br />
All’elemento finito è associato il concetto <strong>di</strong> <strong>di</strong>scretizzazione del continuo, operazione me<strong>di</strong>ante la<br />
quale il dominio <strong>di</strong> definizione viene sud<strong>di</strong>viso in una maglia <strong>di</strong> elementi finiti. Il contorno<br />
dell’elemento può essere approssimato in modo accurato usando elementi con lati curvi. La funzione<br />
incognita viene interpolata tramite una combinazione lineare <strong>di</strong> funzioni <strong>di</strong> forma, definite per ogni<br />
nodo dell’elemento. Le funzioni <strong>di</strong> forma devono possedere le seguenti proprietà [L1, L5]:<br />
- La funzione <strong>di</strong> forma<br />
calcolata negli altri no<strong>di</strong>.<br />
e<br />
N<br />
i<br />
relativa al nodo i dell’elemento, vale 1 se calcolata nel nodo i e 0 se<br />
- Per un generico elemento ad n no<strong>di</strong>, la somma delle funzioni <strong>di</strong> forma deve essere uguale ad 1<br />
(con<strong>di</strong>zione <strong>di</strong> completezza).<br />
- Il valore delle funzioni <strong>di</strong> forma dell’elemento e è nullo al <strong>di</strong> fuori dell’elemento e.<br />
- Perché l’elemento sia compatibile la soluzione approssimata deve essere C m all’interno<br />
dell’elemento e C m-1 sui bor<strong>di</strong>.<br />
Il polinomio interpolante deve poi essere scelto in modo che:<br />
- Il numero <strong>di</strong> termini del polinomio deve essere uguale al numero dei gra<strong>di</strong> <strong>di</strong> libertà associati<br />
all’elemento. Se così non fosse il polinomio interpolante non sarebbe unico. Se ci sono più gdl per<br />
nodo, bisogna considerare i gdl in<strong>di</strong>pendenti tra loro.<br />
- I termini polinomiali debbono essere simmetrici rispetto all’asse <strong>di</strong> simmetria del triangolo <strong>di</strong><br />
Pascal.<br />
16
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
Capitolo 2<br />
Formulazione dell’elemento finito tri<strong>di</strong>mensionale<br />
1. Formulazione dell’elemento finito compatibile<br />
Per l’analisi ad elementi finiti <strong>di</strong> corpi soli<strong>di</strong>, sono <strong>di</strong>sponibili 3 famiglie <strong>di</strong> elementi. Gli elementi<br />
tetraedrici, che sono la generalizzazione nello spazio degli elementi triangolari piani, gli elementi<br />
esaedrici, che sono la generalizzazione degli elementi quadrilateri piani e gli elementi prismatici, che<br />
sono una combinazione <strong>di</strong> elementi triangolari e quadrilateri. In questo lavoro si sono utilizzati<br />
elementi finiti esaedrici a 8 no<strong>di</strong>.<br />
ρ<br />
1<br />
z<br />
y<br />
3<br />
2<br />
4<br />
6<br />
5<br />
8<br />
1<br />
5<br />
2 6<br />
4 8<br />
η<br />
ξ<br />
x<br />
7<br />
3<br />
7<br />
Elemento reale<br />
Elemento parente<br />
Figura 2.1: Elemento esaedrico a 8 no<strong>di</strong>.<br />
Ogni nodo dell’elemento possiede 3 gra<strong>di</strong> <strong>di</strong> libertà, per cui la matrice <strong>di</strong> rigidezza del singolo<br />
elemento risulterà una 24 x 24. Si può fin d’ora notare come l’estensione da elementi finiti piani ai<br />
corrispondenti elementi soli<strong>di</strong>, non comporta grosse novità dal punto <strong>di</strong> vista teorico, ma causa un<br />
sostanziale aumento delle incognite e quin<strong>di</strong> della richiesta macchina (memoria e tempo <strong>di</strong><br />
esecuzione).<br />
17
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
La matrice <strong>di</strong> rigidezza dell’elemento finito solido in questione possiede infatti 24 x 24 = 576<br />
elementi, contro (2 x 4) x (2 x 4) = 64 del corrispondente elemento piano (Isop4).<br />
Ad ogni nodo le incognite sono costituite dagli spostamenti nelle tre <strong>di</strong>rezioni cartesiane X, Y, Z<br />
visibili in figura 2.1. I parametri nodali che definiscono lo spostamento in una <strong>di</strong> queste <strong>di</strong>rezioni<br />
sono in numero <strong>di</strong> 8 (uno spostamento per nodo), dato che lo spostamento in una <strong>di</strong>rezione, risulta<br />
in<strong>di</strong>pendente dagli spostamenti nelle altre 2 <strong>di</strong>rezioni, il polinomio interpolante deve contenere 8<br />
termini del triangolo <strong>di</strong> Pascal. I primi 7 sono facilmente in<strong>di</strong>viduabili e sono 1 (il termine costante),<br />
x, y, z, xy, yz, zx. Il settimo deve essere scelto tra i polinomi <strong>di</strong> grado cubico, dovendo rispettare la<br />
simmetria nel triangolo <strong>di</strong> Pascal (isotropia geometrica) e dovendo contenere termini lineari nelle tre<br />
coor<strong>di</strong>nate (spostamento lungo gli spigoli lineare), il solo termine adatto è xyz.<br />
Volendo che l’elemento sia compatibile, e volendo rappresentare geometrie anche non regolari, è<br />
richiesta una trasformazione parametrica (figura 2.1) che trasformi l’elemento reale <strong>di</strong>storto in un<br />
elemento parente regolare <strong>di</strong> lato 2, passando dal riferimento x, y, z a quello nelle coor<strong>di</strong>nate ξ, η, ρ.<br />
Definendo la trasformazione tramite le stesse funzioni <strong>di</strong> forma utilizzate in seguito per descrivere le<br />
incognite nodali, la trasformazione viene detta isoparamentrica. Una volta definita la trasformazione<br />
è possibile scrivere le funzioni <strong>di</strong> forma per l’elemento regolare nelle coor<strong>di</strong>nate ξ, η, ρ.<br />
Le funzioni <strong>di</strong> forma <strong>di</strong> questo elemento sono ricavabili tramite il proce<strong>di</strong>mento algebrico<br />
generalizzato: imposizione che nel nodo i lungo la <strong>di</strong>rezione j l’incognita Φ valga Φ ij . Questo metodo<br />
però, applicabile per l’elemento piano CST ed in genere a qualsiasi elemento, risulta molto laborioso<br />
date le <strong>di</strong>mensioni delle matrici in causa. E’ preferibile utilizzare meto<strong>di</strong> meno meccanici e più<br />
intuitivi. In questo caso, ricordandoci le proprietà <strong>di</strong> una funzione <strong>di</strong> forma descritte al punto 7 del<br />
capitolo precedente, posso scrivere la funzione del nodo i come produttoria delle equazioni dei 3<br />
piani che passano per tutti gli altri no<strong>di</strong> (in questo modo sono sicuro che negli altri no<strong>di</strong> la funzione <strong>di</strong><br />
forma è nulla) e poi imporre che sia unitaria nel nodo i. Così facendo si ricavano le 8 funzioni <strong>di</strong><br />
forma, che possono essere scritte in forma compatta [L1, L3, L5, L7, L8]:<br />
N<br />
i<br />
1<br />
= ⋅<br />
i<br />
i<br />
1<br />
8<br />
( 1+<br />
ξ ⋅ξ<br />
) ⋅ ( 1+<br />
η ⋅η<br />
) ⋅ ( + ρ ⋅ ρ )<br />
i<br />
(2.1)<br />
dove ξ i , η i , ρ i sono le coor<strong>di</strong>nate del generico nodo i (o +1 o –1).<br />
18
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
Organizzando il vettore delle incognite secondo il seguente schema:<br />
Nodo 1 1, 2, 3. (u, v, w – spostamento in x, y, z)<br />
Nodo 2 4, 5, 6.<br />
…<br />
…<br />
Nodo 8 22, 23, 24<br />
Si nota la relazione, che tornerà utile in fase <strong>di</strong> programmazione, tra i gra<strong>di</strong> <strong>di</strong> libertà associati ad un<br />
nodo, ed il numero del nodo stesso:<br />
Gdl associato all’incognita u nel nodo nnodo = nnodo ⋅3 − 2<br />
Gdl associato all’incognita v nel nodo nnodo = nnodo ⋅3 −1<br />
Gdl associato all’incognita w nel nodo nnodo = nnodo ⋅3<br />
Il vettore delle funzioni <strong>di</strong> spostamento s (3x1) e quello delle incognite nodali q (24x1) sono i<br />
seguenti:<br />
⎡u(<br />
x,<br />
y,<br />
z)<br />
⎤<br />
s =<br />
⎢ ⎥<br />
⎢<br />
v(<br />
x,<br />
y,<br />
z)<br />
⎥<br />
⎢⎣<br />
w(<br />
x,<br />
y,<br />
z)<br />
⎥⎦<br />
⎡ u1<br />
⎤<br />
⎢ ⎥<br />
⎢<br />
v1<br />
⎥<br />
⎢w<br />
⎥<br />
1<br />
⎢ ⎥<br />
⎢u2<br />
⎥<br />
⎢v<br />
⎥<br />
2<br />
⎢ ⎥<br />
q = ⎢w2<br />
⎥<br />
(2.2)<br />
⎢ . ⎥<br />
⎢ ⎥<br />
⎢ . ⎥<br />
⎢<br />
u<br />
⎥<br />
⎢<br />
8<br />
⎥<br />
⎢ v8<br />
⎥<br />
⎢ ⎥<br />
⎣w8<br />
⎦<br />
Le incognite nodali rappresentano i pesi per cui devono essere moltiplicate le funzioni <strong>di</strong> forma per<br />
interpolare gli spostamenti. Avendo definito l’organizzazione del vettore q, si può ora costruire la<br />
matrice N.<br />
19
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
⎡N1<br />
0 0 N<br />
2<br />
0 0 . . . N8<br />
0 0 ⎤<br />
N =<br />
⎢<br />
⎥<br />
⎢<br />
0 N1<br />
0 0 N<br />
2<br />
0 . . . 0 N8<br />
0<br />
⎥<br />
(2.3)<br />
⎢⎣<br />
0 0 N<br />
⎥<br />
1<br />
0 0 N<br />
2<br />
. . . 0 0 N8<br />
⎦<br />
Questa matrice, definita nello spazio normalizzato ξ, η, ρ servirà sia per interpolare gli spostamenti<br />
che per la trasformazione isoparametrica.<br />
s = N ⋅ q<br />
(2.4)<br />
X = N ⋅ Ε<br />
(2.5)<br />
Essendo X il vettore delle coor<strong>di</strong>nate x, y, z e E quello delle coor<strong>di</strong>nate ξ, η, ρ. Per le proprietà delle<br />
funzioni <strong>di</strong> forma, si nota imme<strong>di</strong>atamente che al nodo i dell’elemento parente nello spazio<br />
normalizzato corrisponde, tramite la relazione (2.5), il nodo i dell’elemento reale. La trasformazione<br />
sarà biunivoca se l’elemento reale non è troppo <strong>di</strong>storto, ovvero se il determinante Jacobiano della<br />
trasformazione risulta <strong>di</strong>verso da zero. Come si sono riportati i no<strong>di</strong> dell’elemento dallo spazio<br />
normalizzato a quello reale, si possono riportare anche gli assi ξ, η, ρ. Si nota che le coor<strong>di</strong>nate<br />
cartesiane ξ, η, ρ dello spazio normalizzato, si trasformano in coor<strong>di</strong>nate curvilinee nello spazio<br />
reale.<br />
Dobbiamo ora definire le deformazioni. In uno stato <strong>di</strong> sforzo 3D le deformazioni da tenere in conto<br />
sono tutte e 6.<br />
ε<br />
x<br />
∂u<br />
=<br />
∂x<br />
γ<br />
xy<br />
∂u<br />
∂v<br />
= +<br />
∂y<br />
∂x<br />
∂v<br />
ε<br />
y<br />
=<br />
∂y<br />
∂v<br />
∂w<br />
γ<br />
yz<br />
= +<br />
(2.6)<br />
∂z<br />
∂y<br />
ε<br />
z<br />
∂w<br />
=<br />
∂z<br />
γ<br />
zx<br />
∂w<br />
∂u<br />
= +<br />
∂x<br />
∂z<br />
20
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
Organizzando il vettore delle funzioni <strong>di</strong> deformazione come:<br />
⎡ ε<br />
x ⎤<br />
⎢ ⎥<br />
⎢<br />
ε<br />
y<br />
⎥<br />
⎢ ε ⎥<br />
z<br />
ε = ⎢ ⎥<br />
(2.7)<br />
⎢γ<br />
xy ⎥<br />
⎢γ<br />
⎥<br />
yz<br />
⎢ ⎥<br />
⎢⎣<br />
γ<br />
zx ⎥⎦<br />
Si può ricavare l’operatore <strong>di</strong> congruenza che agendo sul vettore degli spostamenti s fornisce il<br />
vettore delle deformazioni ε secondo la relazione (1.10) :<br />
⎡∂<br />
⎢ ∂x<br />
⎢ 0<br />
⎢<br />
⎢ 0<br />
L = ⎢<br />
⎢<br />
∂<br />
∂y<br />
⎢<br />
⎢ 0<br />
⎢<br />
⎢<br />
∂<br />
⎣ ∂z<br />
0<br />
∂<br />
∂y<br />
0<br />
∂<br />
∂x<br />
∂<br />
∂z<br />
0<br />
0 ⎤<br />
⎥<br />
0 ⎥<br />
⎥<br />
∂ ⎥<br />
∂z<br />
⎥<br />
0 ⎥<br />
⎥<br />
∂<br />
∂y⎥<br />
⎥<br />
∂<br />
∂x⎥⎦<br />
(2.8)<br />
Facendo operare L sulla matrice N si ricava la matrice <strong>di</strong> congruenza interna dell’elemento finito B:<br />
⎡∂N<br />
⎢<br />
⎢<br />
∂x<br />
⎢ 0<br />
⎢<br />
⎢<br />
⎢ 0<br />
B = ⎢<br />
⎢∂N<br />
⎢ ∂y<br />
⎢<br />
⎢ 0<br />
⎢<br />
⎢∂N<br />
⎢<br />
⎣ ∂z<br />
1<br />
1<br />
1<br />
0<br />
∂N<br />
∂y<br />
0<br />
∂N<br />
∂x<br />
∂N<br />
∂z<br />
0<br />
1<br />
1<br />
1<br />
0<br />
0<br />
∂N<br />
∂z<br />
0<br />
1<br />
∂N<br />
∂y<br />
∂N<br />
∂x<br />
1<br />
1<br />
∂N<br />
∂x<br />
0<br />
0<br />
∂N<br />
∂y<br />
0<br />
2<br />
2<br />
∂N<br />
∂z<br />
2<br />
0<br />
∂N<br />
∂y<br />
0<br />
∂N<br />
∂x<br />
∂N<br />
∂z<br />
0<br />
2<br />
2<br />
2<br />
0<br />
0<br />
∂N<br />
∂z<br />
0<br />
2<br />
∂N<br />
∂y<br />
∂N<br />
∂x<br />
2<br />
2<br />
...<br />
...<br />
...<br />
...<br />
∂N<br />
∂x<br />
0<br />
0<br />
...<br />
∂N<br />
∂y<br />
0<br />
∂N<br />
8<br />
8<br />
8<br />
∂z<br />
0<br />
∂N<br />
∂y<br />
0<br />
∂N<br />
8<br />
8<br />
∂x<br />
∂N<br />
8<br />
∂z<br />
0<br />
0<br />
0<br />
∂N<br />
∂z<br />
0<br />
∂N<br />
8<br />
8<br />
∂y<br />
∂N<br />
8<br />
∂x<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
(2.9)<br />
21
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
Si nota che volendosi 6 deformazioni la matrice B possiede 6 righe ed avendosi 8 no<strong>di</strong> con 3<br />
incognite per nodo, la matrice B possiede 3 x 8 = 24 colonne. Le funzioni N i sono definite nelle<br />
coor<strong>di</strong>nate ξ, η, ρ dello spazio normalizzato, per cui le derivate che contiene la matrice B sono<br />
derivate <strong>di</strong> funzioni composte:<br />
∂N<br />
i<br />
∂x<br />
∂N<br />
i ∂ξ<br />
∂N<br />
i ∂η<br />
∂N<br />
i ∂ρ<br />
= + +<br />
∂ξ<br />
∂x<br />
∂η<br />
∂x<br />
∂ρ<br />
∂x<br />
(2.10)<br />
La trasformazione che permette <strong>di</strong> relazionare lo spazio reale con quello normalizzato, è scritta come<br />
X = X(ξ, η, ρ), la trasformazione inversa non è nota. Si preferisce quin<strong>di</strong> sviluppare le derivate nella<br />
forma:<br />
∂N<br />
i<br />
∂N<br />
i ∂x<br />
∂N<br />
i ∂y<br />
∂N<br />
i ∂y<br />
= + +<br />
(2.11)<br />
∂ξ<br />
∂x<br />
∂ξ<br />
∂y<br />
∂ξ<br />
∂y<br />
∂ξ<br />
In questo modo è possibile ricavare le derivate cercate risolvendo 8 sistemi lineari, uno per ogni<br />
funzione <strong>di</strong> forma:<br />
⎡∂N<br />
i<br />
⎤ ⎡ ∂x<br />
⎢ ⎥ ⎢<br />
⎢<br />
∂ξ<br />
⎥ ⎢<br />
∂ξ<br />
⎢∂N<br />
i ⎥ ⎢ ∂x<br />
=<br />
⎢ ∂η<br />
⎥ ⎢∂η<br />
⎢∂N<br />
⎥ ⎢<br />
i<br />
∂x<br />
⎢ ⎥ ⎢<br />
⎢⎣<br />
∂ρ<br />
⎥⎦<br />
⎢⎣<br />
∂ρ<br />
∂y<br />
∂ξ<br />
∂y<br />
∂η<br />
∂y<br />
∂ρ<br />
∂z<br />
⎤ ⎡∂N<br />
i<br />
⎤<br />
∂ξ<br />
⎥ ⎢ ⎥<br />
⎥ ⎢ ⎥<br />
∂z<br />
⎢<br />
∂ ∂<br />
⎥ N x i<br />
⋅ ⎥<br />
∂η<br />
⎥ ⎢ ∂y<br />
⎥<br />
∂z<br />
⎥ ⎢∂N<br />
⎥<br />
i<br />
⎥ ⎢ ⎥<br />
∂ρ<br />
⎥⎦<br />
⎣ ∂z<br />
⎦<br />
(2.12)<br />
Il vettore dei termini noti viene valutato come:<br />
⎡∂N<br />
i<br />
⎤ ⎡1<br />
⎤<br />
⎢ ⎥ ⎢ ξ + +<br />
⎥<br />
⎢<br />
∂<br />
i<br />
(1 ηηi<br />
)(1 ρρ )<br />
ξ<br />
i<br />
⎥ 8<br />
⎢<br />
⎥<br />
⎢∂N<br />
i ⎥ 1<br />
= ⎢ ηi<br />
(1 + ξξ<br />
i<br />
)(1 + ρρi<br />
) ⎥<br />
⎢ ∂η<br />
⎥ ⎢8<br />
⎥<br />
⎢∂N<br />
⎥ ⎢1<br />
i<br />
⎥<br />
⎢ ⎥ ⎢<br />
ρi<br />
(1 + ξξ<br />
i<br />
)(1 + ηηi<br />
)<br />
⎣<br />
⎥<br />
⎢⎣<br />
∂ρ<br />
⎥⎦<br />
8<br />
⎦<br />
(2.13)<br />
22
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
La matrice dei coefficienti è detta matrice Jacobiana (J) e <strong>di</strong>pende solamente dalla trasformazione:<br />
J<br />
⎡ ∂x<br />
⎢<br />
⎢<br />
∂ξ<br />
⎢<br />
⎢ ∂x<br />
= ⎢<br />
⎢∂η<br />
⎢<br />
⎢ ∂x<br />
⎢<br />
⎢⎣<br />
∂ρ<br />
∂y<br />
∂ξ<br />
∂y<br />
∂η<br />
∂y<br />
∂ρ<br />
∂z<br />
⎤ ⎡<br />
∂ξ<br />
⎥ ⎢<br />
⎥ ⎢<br />
⎥ ⎢<br />
∂z<br />
⎥ ⎢<br />
⎥ ⋅ ⎢<br />
∂η<br />
⎥ ⎢<br />
⎥ ⎢<br />
∂z<br />
⎥ ⎢<br />
⎥ ⎢<br />
∂ρ<br />
⎥⎦<br />
⎢⎣<br />
8<br />
∑<br />
i=<br />
1<br />
8<br />
∑<br />
i=<br />
1<br />
8<br />
∑<br />
i=<br />
1<br />
∂N<br />
i<br />
x<br />
∂ξ<br />
i<br />
∂N<br />
i<br />
x<br />
∂η<br />
i<br />
∂N<br />
i<br />
x<br />
∂ρ<br />
i<br />
8<br />
∑<br />
i=<br />
1<br />
8<br />
∑<br />
i=<br />
1<br />
8<br />
∑<br />
i=<br />
1<br />
∂N<br />
i<br />
y<br />
∂ξ<br />
i<br />
∂N<br />
i<br />
y<br />
∂η<br />
i<br />
∂N<br />
i<br />
y<br />
∂ρ<br />
i<br />
8<br />
∑<br />
i=<br />
1<br />
8<br />
∑<br />
i=<br />
1<br />
8<br />
∑<br />
i=<br />
1<br />
∂N<br />
i<br />
⎤<br />
zi<br />
∂ξ<br />
⎥<br />
⎥<br />
⎥<br />
∂N<br />
⎥<br />
i<br />
zi<br />
⎥<br />
∂η<br />
⎥<br />
⎥<br />
∂N<br />
⎥<br />
i<br />
zi<br />
⎥<br />
∂ρ<br />
⎥⎦<br />
(2.14)<br />
Si nota che se la trasformazione è solamente un cambio <strong>di</strong> scala, la matrice Jacobiana <strong>di</strong>venta:<br />
J<br />
⎡a<br />
=<br />
⎢<br />
⎢<br />
0<br />
⎢⎣<br />
0<br />
0<br />
b<br />
0<br />
0⎤<br />
0<br />
⎥<br />
⎥<br />
c⎥⎦<br />
(2.15)<br />
Se l’elemento è <strong>di</strong>storto, sarà in generale una matrice piena. Per non avere fenomeni <strong>di</strong> ripiegamento<br />
durante la trasformazione (per<strong>di</strong>ta <strong>di</strong> biunivocità), viene richiesto che il determinante della matrice J<br />
sia strettamente maggiore <strong>di</strong> zero. Ricavata la matrice B si deve ora formare la matrice <strong>di</strong> rigidezza K<br />
dell’elemento finito, dalla relazione (1.18) si ha:<br />
K = B D B dV<br />
e ∫ ⋅ ⋅<br />
(2.16)<br />
Ve<br />
T<br />
Dove la matrice D è la matrice delle costanti elastiche del materiale:<br />
⎡1<br />
⎢<br />
⎢<br />
B<br />
⎢B<br />
D = A⋅<br />
⎢<br />
⎢0<br />
⎢0<br />
⎢<br />
⎣0<br />
B<br />
1<br />
B<br />
0<br />
0<br />
0<br />
B<br />
B<br />
1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
C<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
C<br />
0<br />
0 ⎤<br />
0<br />
⎥<br />
⎥<br />
0 ⎥<br />
⎥<br />
0 ⎥<br />
0 ⎥<br />
⎥<br />
C<br />
⎦<br />
(2.17)<br />
23
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
E(1<br />
−υ)<br />
A =<br />
(1 + υ)(1<br />
− 2υ<br />
)<br />
υ<br />
B =<br />
( 1−υ)<br />
1−<br />
2υ<br />
C =<br />
(2.18)<br />
2(1 −υ)<br />
La matrice (2.17) e le costanti (2.18) sono valide in caso <strong>di</strong> elasticità lineare e <strong>di</strong> materiali isotropo (2<br />
costanti elastiche, E e ν). Se il materiale non fosse lineare, sarebbe necessario l’introduzione <strong>di</strong> una<br />
legge costitutiva che modelli le rigidezze del materiale a seconda dello stato <strong>di</strong> sforzo. Se il materiale<br />
fosse non isotropo, la matrice D conterrebbe più costanti elastiche e sarebbe scritta secondo un ben<br />
preciso sistema <strong>di</strong> assi <strong>di</strong> riferimento locale, si renderebbe quin<strong>di</strong> necessaria una rotazione degli assi<br />
dal sistema locale al sistema globale.<br />
La matrice B contiene però delle funzioni <strong>di</strong> ξ, η, ρ, per cui l’integrale va fatto con le coor<strong>di</strong>nate del<br />
dominio normalizzato che rappresentano, come già detto, un sistema <strong>di</strong> coor<strong>di</strong>nate curvilineo per<br />
l’elemento reale. L’elemento <strong>di</strong> volume infinitesimo può essere definito come:<br />
dV<br />
= ( dξ<br />
∧ dη)<br />
⋅ d ρ<br />
(2.19)<br />
I versori del sistema <strong>di</strong> coor<strong>di</strong>nate curvilinee può essere scritto riferendosi alla terna cartesiana,<br />
tramite gli incrementi delle funzioni x, y, z nelle <strong>di</strong>rezioni dei tre versori:<br />
∂x<br />
∂y<br />
∂z<br />
dξ<br />
= dξ<br />
⋅ i + dξ<br />
⋅ j + dξ<br />
⋅ k<br />
∂ξ<br />
∂ξ<br />
∂ξ<br />
∂x<br />
∂y<br />
∂z<br />
dη<br />
= dη<br />
⋅i<br />
+ dη<br />
⋅ j + dη<br />
⋅ k<br />
∂η<br />
∂η<br />
∂η<br />
(2.20)<br />
∂x<br />
∂y<br />
∂z<br />
dρ<br />
= dρ<br />
⋅i<br />
+ dρ<br />
⋅ j + dρ<br />
⋅ k<br />
∂ρ<br />
∂ρ<br />
∂ρ<br />
24
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
L’elemento infinitesimo <strong>di</strong> volume è:<br />
dV<br />
⎡ ∂x<br />
∂y<br />
∂z<br />
⎤ ⎡ ∂x<br />
∂y<br />
∂z<br />
⎤<br />
⎢ dξ<br />
dξ<br />
dξ<br />
ξ ξ ξ<br />
⎥ ⎢<br />
ξ ξ ξ<br />
⎥<br />
⎢<br />
∂ ∂ ∂<br />
⎥ ⎢<br />
∂ ∂ ∂<br />
⎥<br />
⎢<br />
⎥ ⎢<br />
⎥<br />
⎢ ∂x<br />
∂y<br />
∂z<br />
⎥ ⎢ ∂x<br />
∂y<br />
∂z<br />
⎥<br />
= det ⎢ dη<br />
dη<br />
dη⎥<br />
= det⎢<br />
⎥ ⋅ dξ<br />
⋅ dη<br />
⋅ dρ<br />
= det[ J ] ⋅ dξ<br />
⋅ dη<br />
⋅ dρ<br />
(2.21)<br />
⎢∂η<br />
∂η<br />
∂η<br />
⎥ ⎢∂η<br />
∂η<br />
∂η<br />
⎥<br />
⎢<br />
⎥ ⎢<br />
⎥<br />
⎢ ∂x<br />
∂y<br />
∂z<br />
⎥ ⎢ ∂x<br />
∂y<br />
∂z<br />
⎥<br />
⎢ dρ<br />
dρ<br />
dρ<br />
⎥ ⎢<br />
⎥<br />
⎢⎣<br />
∂ρ<br />
∂ρ<br />
∂ρ<br />
⎥⎦<br />
⎢⎣<br />
∂ρ<br />
∂ρ<br />
∂ρ<br />
⎥⎦<br />
Infatti sia B la matrice ottenuta dalla matrice A, moltiplicandone una riga per uno scalare k, il<br />
determinate <strong>di</strong> B risulta: det( B)<br />
= k ⋅ det( A)<br />
. Sfruttando questa proprietà si è potuto raccogliere dξ,<br />
dη,dρ all’esterno della matrice, e mettere in mostra il determinante della matrice Jacobiana.<br />
La relazione (2.16) si può quin<strong>di</strong> scrivere come:<br />
K<br />
e<br />
=<br />
1 1 1<br />
∫ ∫ ∫<br />
−1<br />
−1<br />
−1<br />
B<br />
T<br />
⋅ D ⋅ B ⋅ det( J ) ⋅ dξ<br />
⋅ dη<br />
⋅ dρ<br />
(2.22)<br />
Essendo, in generale, il determinante Jacobiano una funzione razionale, l’integrale si esegue per via<br />
numerica utilizzando le formule <strong>di</strong> Gauss.<br />
K<br />
e<br />
n<br />
n<br />
n<br />
= ∑∑∑<br />
i= 1 j= 1 k = 1<br />
T<br />
[ B ⋅ D ⋅ B ⋅ J )] ⋅Wi<br />
⋅W<br />
j<br />
⋅Wk<br />
det( (2.23)<br />
ijk<br />
La quantità tra parentesi quadra va calcolata in ogni punto <strong>di</strong> Gauss, moltiplicato al peso della<br />
formula e poi sommata a quelle relative agli altri punti. Se n è il numero <strong>di</strong> punti <strong>di</strong> Gauss, è noto che<br />
l’integrale numerico è esatto per un polinomio al massimo <strong>di</strong> grado 2n – 1, per cui, essendo la matrice<br />
B composta da termini lineari, e supponendo che il determinante <strong>di</strong> J sia una costante, si dovrà<br />
prendere almeno un reticolo <strong>di</strong> 8 punti (n=2) all’interno dell’elemento (supponendo <strong>di</strong> utilizzare la<br />
firmula <strong>di</strong> Gauss-Legendre).<br />
25
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
Si è visto che se l’elemento non è <strong>di</strong>storto il determinante <strong>di</strong> J è effettivamente una costante (2.15) e<br />
vale un ottavo del volume, per cui l’integrazione risulta esatta. Se l’elemento è <strong>di</strong>storto la funzione da<br />
integrare non è più un polinomio, per cui è possibile solo approssimare il valore dell’integrale. Per la<br />
1 1 1<br />
formula <strong>di</strong> integrazione <strong>di</strong> Gauss-Legendre 2x2x2 i punti hanno coor<strong>di</strong>nate ± ; ± ; ± e pesi<br />
3 3 3<br />
pari ad 1.<br />
Le forze nodali equivalenti alle forze <strong>di</strong> volume (peso oppure inerzia) si integrano allo stesso modo<br />
partendo dall’equazione (1.19):<br />
F<br />
e<br />
n n n<br />
T<br />
∫ N ⋅ F ⋅ dV =<br />
Ve<br />
i= 1 j= 1 k=<br />
1<br />
= ∑∑∑<br />
T<br />
[ N ⋅ F ⋅ J )] ⋅Wi<br />
⋅W<br />
j<br />
⋅Wk<br />
det( (2.24)<br />
ijk<br />
2. La rigidezza dell’elemento compatibile<br />
L’elemento così formulato risulta compatibile e conforme. La matrice B contiene infatti delle<br />
derivate <strong>di</strong> or<strong>di</strong>ne massimo pari a 1 (m=1), la completezza è garantita dal fatto che il polinomio<br />
interpolante è completo sino al grado 1, la conformità perché il polinomio interpolante risulta C ∞<br />
all’interno dell’elemento e C 0 sulla sua frontiera. E’ possibile quin<strong>di</strong> interpolare correttamente campi<br />
<strong>di</strong> variazione lineare <strong>di</strong> spostamento senza alcun riguardo alla forma dell’elemento. Non è così se lo<br />
spostamento da interpolare risulta quadratico (stato deformativi flessionale). Si riportano i risultati <strong>di</strong><br />
un Pacth Test [L1] eseguito sul corrispondente elemento bi<strong>di</strong>mensionale (Isop4).<br />
4<br />
y<br />
3<br />
1<br />
x<br />
2<br />
2<br />
2a<br />
Figura 2.2: Elemento Isop4.<br />
Imponendo il campo <strong>di</strong> spostamento quadratico:<br />
26
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
u = xy<br />
1 v = − x<br />
2<br />
2<br />
La soluzione esatta fornisce deformazioni e sforzi nulli, la soluzione approssimata con l’elemento:<br />
γ = xy<br />
x<br />
Ex<br />
τ<br />
xy<br />
=<br />
2(1<br />
+ υ)<br />
L’elemento non riesce a riprodurre lo stato <strong>di</strong> deformazione imposto. Il valore non corretto dello<br />
scorrimento si ripercuote sull’energia <strong>di</strong> deformazione a taglio, teoricamente nulla:<br />
2Ea<br />
2Ea<br />
=<br />
⎛ 1−υ<br />
2 ⎞<br />
esatta 2<br />
U totale<br />
approssimata<br />
= ⎜1+<br />
a<br />
2<br />
⎟<br />
3(1 −υ )<br />
3(1 −υ<br />
) ⎝ 2 ⎠<br />
U totale<br />
2<br />
L’energia <strong>di</strong> deformazione tende ad amplificarsi tramite il rapporto ( 1 (1 −υ)<br />
a 2)<br />
+ , fattore che<br />
tende a crescere con l’aumentare della snellezza dell’elemento. L’eccessivo valore <strong>di</strong> U comporta un<br />
elevato valore della rigidezza, fenomeno chiamato Shear Locking. Questo comportamento è esaltato<br />
negli elementi semplici, in cui le funzioni <strong>di</strong> forma sono rappresentate da polinomi <strong>di</strong> gra<strong>di</strong> basso.<br />
L’elemento solido ha un comportamento analogo, con Locking nelle tre componenti <strong>di</strong> taglio.<br />
Per rime<strong>di</strong>are a questo inconveniente si possono seguire <strong>di</strong>verse alternative, in questo lavoro si è<br />
esaminata l’integrazione selettiva e l’aggiunta <strong>di</strong> funzioni <strong>di</strong> forma incompatibili.<br />
3. L’integrazione selettiva<br />
Dal paragrafo precedente si nota che la <strong>di</strong>stribuzioni dello scorrimento γ xy = x permette <strong>di</strong> rime<strong>di</strong>are<br />
all’inconveniente del Locking calcolando l’energia a taglio in x = y = 0. Ragionamento analogo per<br />
l’elemento solido. Calcolando l’energia <strong>di</strong> deformazione a taglio nell’unico punto <strong>di</strong> Gauss x = y = z<br />
= 0 la si pone numericamente a zero. Si tratta quin<strong>di</strong> <strong>di</strong> integrare la matrice <strong>di</strong> rigidezza con una<br />
integrazione 2x2x2 per le deformazioni normali e con una integrazione ridotta per lo scorrimento<br />
[L1, L4, L5, L9, L16].<br />
27
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
Si partiziona la matrice del materiale D nel modo seguente:<br />
⎡D<br />
n<br />
D = ⎢<br />
⎣<br />
0<br />
0 ⎤<br />
D<br />
⎥<br />
t ⎦<br />
(2.25)<br />
D n<br />
⎡1<br />
= A⋅<br />
⎢<br />
⎢<br />
B<br />
⎢⎣<br />
B<br />
B<br />
1<br />
B<br />
B⎤<br />
B<br />
⎥<br />
⎥<br />
1⎥⎦<br />
⎡C<br />
0<br />
D = ⋅<br />
⎢<br />
t<br />
A<br />
⎢<br />
0 C<br />
⎢⎣<br />
0 0<br />
0 ⎤<br />
0<br />
⎥ ⎥⎥ C⎦<br />
Con A, B, C, si sono in<strong>di</strong>cati gli stessi parametri in (2.18). La matrice D n raccoglie le caratteristiche<br />
del materiale relative ai fenomeni normali, la D t ai fenomeni taglianti.<br />
Allo stesso modo si può partizionare la matrice B:<br />
⎡B<br />
⎤<br />
n<br />
B = ⎢ ⎥<br />
(2.26)<br />
⎣<br />
B<br />
t ⎦<br />
⎡∂N1<br />
⎢<br />
⎢ ∂x<br />
= ⎢ 0<br />
⎢<br />
⎢<br />
⎢ 0<br />
⎣<br />
0<br />
∂N<br />
∂y<br />
∂N<br />
∂z<br />
∂N<br />
∂x<br />
2<br />
∂N<br />
∂y<br />
∂N<br />
∂z<br />
∂N<br />
∂x<br />
∂N<br />
∂y<br />
1<br />
2<br />
8<br />
B n<br />
0 0<br />
0 ... ... ... ... ... 0 0<br />
1<br />
2<br />
8<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
8<br />
0<br />
0<br />
0<br />
∂N<br />
∂z<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎡∂N<br />
⎢<br />
⎢<br />
∂y<br />
= ⎢ 0<br />
⎢<br />
⎢∂N<br />
⎢<br />
⎢⎣<br />
∂z<br />
1<br />
∂N<br />
∂x<br />
∂N<br />
∂z<br />
1<br />
∂N<br />
∂y<br />
∂N<br />
∂x<br />
∂N<br />
∂y<br />
2<br />
∂N<br />
∂z<br />
∂N<br />
∂x<br />
∂N<br />
∂z<br />
2<br />
∂N<br />
∂y<br />
∂N<br />
∂x<br />
∂N<br />
∂y<br />
∂N<br />
∂z<br />
∂N<br />
∂x<br />
∂N<br />
∂z<br />
⎤<br />
0 ⎥<br />
⎥<br />
∂N<br />
8 ⎥<br />
∂y<br />
⎥<br />
∂N<br />
⎥<br />
⎥<br />
∂x<br />
⎥⎦<br />
1 1<br />
2 2<br />
8<br />
B t<br />
0<br />
... ... ... ... ... 0<br />
1<br />
1 2<br />
2<br />
8<br />
8<br />
0<br />
0<br />
0<br />
0<br />
8<br />
0<br />
8<br />
28
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
In questo modo, operando le operazioni matriciali per blocchi, si giunge alla seguente formulazione<br />
della matrice <strong>di</strong> rigidezza dell’elemento finito:<br />
∫<br />
∫<br />
K = B ⋅ D ⋅ B ⋅ dV + B ⋅ D ⋅ B ⋅ dV<br />
(2.27)<br />
e<br />
Ve<br />
n<br />
T<br />
n<br />
n<br />
Ve<br />
t<br />
T<br />
t<br />
t<br />
Da notare che la matrice K e rimane sempre una 24x24, dato che i prodotti matriciali forniscono<br />
(24x3)x(3x3)x(3x24) = (24x24). Ora però il contributo tagliante è separato dal contributo normale,<br />
per cui si può integrare con una integrazione selettiva (<strong>di</strong>versa per i due contributi):<br />
2<br />
2<br />
2<br />
∑∑∑<br />
i= 1 j= 1 k = 1<br />
1 1 1<br />
T<br />
T<br />
[ B ⋅D<br />
⋅B<br />
⋅det(<br />
J )] + [ B ⋅D<br />
⋅B<br />
⋅det(<br />
J )]<br />
∑∑∑<br />
K =<br />
⋅8<br />
(2.28)<br />
e<br />
n<br />
n<br />
n<br />
ijk<br />
i= 1 j = 1 k = 1<br />
t<br />
t<br />
t<br />
ijk<br />
dove si sono già inseriti i pesi delle formule <strong>di</strong> Gauss – Legendre, pensando ad integrazioni su 2x2x2<br />
punti e su 1 punto.<br />
L’integrazione selettiva su elementi Isop4 piani da risultati ottimi. Nel caso si usi su un elemento<br />
esaedrico nasce però un problema. Se la matrice dell’elemento Isop4 venisse integrata utilizzando<br />
un’integrazione ridotta, anziché selettiva si vedrebbe la nascita <strong>di</strong> due mo<strong>di</strong> ad energia nulla, detti<br />
mo<strong>di</strong> spuri, questo comporta l’introduzione <strong>di</strong> labilità non volute nel modello strutturale, e bisogna<br />
prestare molta attenzione al fatto che un modo spurio non possa propagarsi [L1, L4].<br />
4<br />
y<br />
3<br />
x<br />
1<br />
2<br />
Figura 2.3: Esempio <strong>di</strong> un modo spurio.<br />
Il modo deformativi ad energia nulla nasce perché si valuta l’energia <strong>di</strong> deformazione nell’unico<br />
punto x = y = 0, dove il contributo tagliante è nullo per una deformazione imposta come in figura 2.3<br />
29
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
(<strong>di</strong> tipo flessionale), ma è nullo anche il contributo dovuto alle deformazioni normali, in quanto<br />
l’elementino infinitesimo posto nell’origine degli assi non si deforma. L’integrazione selettiva<br />
scavalca questo problema, valutando il contributo flessionale in altri punti.<br />
Esaminiamo però il caso <strong>di</strong> un elemento solido esaedrico sottoposto ad integrazione selettiva. Diamo<br />
una deformata all’elemento <strong>di</strong> tipo torsionale attorno ad uno dei tre assi. Il contributo all’energia<br />
deformativi dovuto alla deformazione tagliante è nulla, in quanto viene calcolata nell’unico punto x =<br />
y = z = 0. Il contributo dovuto alle deformazioni normali si calcola nei punti <strong>di</strong> gauss 2x2x2.<br />
Supponiamo che la torsione avvenga attorno all’asse x. I piani perpen<strong>di</strong>colari all’asse x rimangono<br />
piani a deformazione avvenuta (l’elemento non è in grado <strong>di</strong> cogliere l’ingobbimento della sua<br />
sezione) per cui la deformazione ε x è nulla in tutti e 8 i punti <strong>di</strong> Gauss. Ma anche le deformazioni ε y e<br />
ε z sono nulle in quanto nel piano xz la sezione ha un moto <strong>di</strong> rotazione e non si deforma.<br />
4<br />
z<br />
3<br />
x<br />
1<br />
2<br />
Figura 2.4: Stato deformativo in una sezione perpen<strong>di</strong>colare all'asse <strong>di</strong> torsione.<br />
L’energia <strong>di</strong> deformazione risulta quin<strong>di</strong> nulla. Anche se opero con l’integrazione selettiva, esistono<br />
3 mo<strong>di</strong> spuri (una torsione attorno a ciascun asse) che rendono labile il sistema.<br />
Una prova numerica <strong>di</strong> quanto esposto è ottenibile dal caso seguente. Si vuole simulare una prova <strong>di</strong><br />
trazione lungo l’asse x su <strong>di</strong> un singolo elemento esaedrico regolare <strong>di</strong> lato 2 con baricentro<br />
nell’origine degli assi, utilizzando l’integrazione selettiva. Si è scelto <strong>di</strong> porre 0 il coefficiente <strong>di</strong><br />
Poisson, in questo modo, vincolando tutti gli spostamenti dei quattro no<strong>di</strong> a quota x = -1, e<br />
sottoponendo i no<strong>di</strong> a quota x = 1 ad una forza parallela all’asse x, l’unico spostamento che ci si<br />
aspetta è in <strong>di</strong>rezione x, peraltro facilmente calcolabile.<br />
La simulazione numerica si blocca all’atto della risoluzione del sistema, con l’avviso: termine<br />
pivotale nullo, sistema labile.<br />
30
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
z<br />
y<br />
F<br />
F<br />
x<br />
F<br />
F<br />
Figura 2.5: Elemento in trazione.<br />
Ricopiando la matrice dei coefficienti in un programma <strong>di</strong> analisi matematica è possibile calcolarne<br />
autovalori e autovettori. Ci si può così accorgere che la matrice della rigidezza (a cui sono già state<br />
tolte le righe e le colonne relative ai vincoli) risulta labile. Infatti un autovalore risulta nullo, ed il<br />
corrispondente autovettore ha forma:<br />
Nodo 5 Nodo 6 Nodo 7 Nodo 8<br />
u i (in <strong>di</strong>r. x) 0 0 0 0<br />
v i (in <strong>di</strong>r. x) -K -K K K<br />
w i (in <strong>di</strong>r. x) +K -K -K K<br />
Dove K è una costante generica. Si può notare che si sviluppa un modo ad energia nulla.<br />
Se si aggiunge un vincolo, atto a bloccare la nascita <strong>di</strong> questo modo deformativo:<br />
z<br />
y<br />
F<br />
F<br />
x<br />
F<br />
Biella<br />
F<br />
Figura 2.6: Elemento in trazione con un vincolo aggiuntivo.<br />
I risultati che si ottengono sono corretti, ed il vincolo aggiuntivo ha reazione vincolare nulla.<br />
31
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
4. Le funzioni <strong>di</strong> forma incompatibili<br />
Un approccio basato sull’integrazione selettiva, produce per l’elemento esaedrico a 8 no<strong>di</strong>, la nascita<br />
<strong>di</strong> tre mo<strong>di</strong> spuri <strong>di</strong> forma torsionale. Un secondo metodo per eliminare lo shear locking introdotto da<br />
Wilson consiste nell’introduzione <strong>di</strong> ulteriori funzioni <strong>di</strong> forma legati a dei parametri incogniti α<br />
interni all’elemento che descrivano dei mo<strong>di</strong> <strong>di</strong> deformazione quadratica. Un elemento così formulato<br />
riproduce correttamente un campo <strong>di</strong> sforzi flessionale senza introdurre mo<strong>di</strong> spuri [L1, L5, L9, L16,<br />
L17], [Wil], [Tay], [Les].<br />
4 3<br />
4<br />
3<br />
4 3<br />
1<br />
2<br />
1<br />
2<br />
1<br />
2<br />
Figura 2.7: Aggiunta della funzione <strong>di</strong> forma incompatibile.<br />
Nel caso tri<strong>di</strong>mensionale le funzioni incompatibili da aggiungere sono:<br />
2<br />
ψ<br />
1<br />
= 1−ξ<br />
2<br />
ψ<br />
2<br />
= 1−η<br />
2<br />
= −<br />
(2.29)<br />
ψ<br />
3<br />
1 ρ<br />
Il vettore q contiene ora anche 9 incognite interne, ha quin<strong>di</strong> <strong>di</strong>mensioni 33x1. La matrice N è<br />
⎡N1<br />
0 0 N<br />
2<br />
0 0 . . . ψ<br />
3<br />
0 0 ⎤<br />
N =<br />
⎢<br />
⎥<br />
⎢<br />
0 N1<br />
0 0 N<br />
2<br />
0 . . . 0 ψ<br />
3<br />
0<br />
⎥<br />
(2.30)<br />
⎢⎣<br />
0 0 N<br />
⎥<br />
1<br />
0 0 N<br />
2<br />
. . . 0 0 ψ<br />
3 ⎦<br />
e ha <strong>di</strong>mensioni 3x33. Lo sviluppo segue le stesse regole dell’elemento compatibile, nella<br />
trasformazione parametrica non compaiono le funzioni <strong>di</strong> forma incompatibili, per cui l’elemento è<br />
del tipo super parametrico (si utilizzano meno funzioni per descrivere la geometria rispetto a quelle<br />
utilizzate per descrivere gli spostamenti).<br />
32
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
I gra<strong>di</strong> <strong>di</strong> libertà introdotti con le funzioni incompatibili, sono scomo<strong>di</strong> da trattare in un co<strong>di</strong>ce <strong>di</strong><br />
calcolo, perché non sono associate a nessun nodo visibile. E’ possibile condensarli staticamente in<br />
modo da ottenere una matrice <strong>di</strong> rigidezza sempre <strong>di</strong> 24x24.<br />
Ottenuta la matrice 33x33, si partizioni il sistema relativo al singolo elemento come segue:<br />
⎡K<br />
K ⎤ ⎡q⎤<br />
⎡F<br />
cc cn<br />
q ⎤<br />
⎢ ⎥ ⋅ ⎢ ⎥ + ⎢ ⎥ = 0<br />
(2.31)<br />
⎣<br />
K K<br />
⎦ ⎣α ⎦ ⎣F nc nn<br />
α ⎦<br />
Si ricava il vettore a dalla seconda equazione e lo si sostituisce nella prima:<br />
−1<br />
α = K ( −F<br />
− K q)<br />
(2.32)<br />
nn<br />
α<br />
nc<br />
cond<br />
cond<br />
K ⋅ q + F = 0<br />
(2.33)<br />
Dove si è posto:<br />
K<br />
cond<br />
−1<br />
= K − K K K<br />
F<br />
cond −<br />
F K K F<br />
cc cn nn nc<br />
q<br />
−<br />
1<br />
cn nn α<br />
= (2.34)<br />
In questo modo la matrice <strong>di</strong> rigidezza dell’elemento ed il vettore delle forze hanno ancora<br />
<strong>di</strong>mensioni 24x24 e 24x1.<br />
33
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
5. I vincoli elastici concentrati<br />
Si introduce ora la rigidezza <strong>di</strong> una molla elastica vincolante un nodo qualsiasi. L’orientamento della<br />
molla nello spazio è dato dai tre coseni <strong>di</strong>rettori dell’asse della molla θ x , θ y , θ z . Siano q x , q y , q z gli<br />
spostamenti <strong>di</strong> un estremo della molla, l’allungamento si può scrivere come:<br />
∆ = q cos( θ ) + q cos( θ ) + q cos( θ )<br />
(2.35)<br />
x<br />
x<br />
y<br />
y<br />
z<br />
z<br />
L’energia <strong>di</strong> deformazione risulta:<br />
U<br />
=<br />
1<br />
2<br />
k<br />
[ q cos( θ ) + q cos( θ ) + q cos( θ )] 2<br />
x<br />
x<br />
y<br />
y<br />
z<br />
z<br />
U<br />
1 2<br />
2<br />
2 2<br />
2<br />
2<br />
= k[<br />
q<br />
x<br />
cos ( θ<br />
x<br />
) + q<br />
y<br />
cos ( θ<br />
y<br />
) + q<br />
z<br />
cos ( θ<br />
z<br />
) +<br />
2<br />
2q<br />
q cos( θ )cos( θ ) + 2q<br />
q cos( θ ) cos( θ ) + 2q<br />
q<br />
x<br />
y<br />
x<br />
y<br />
y<br />
z<br />
y<br />
z<br />
x<br />
z<br />
cos( θ ) cos( θ )]<br />
x<br />
z<br />
Raccogliendo si ottiene:<br />
U<br />
1<br />
=<br />
2<br />
[ q q q ]<br />
x<br />
y<br />
z<br />
2<br />
⎡ cos ( θ<br />
x<br />
)<br />
⎢<br />
⋅ k⎢cos(<br />
θ<br />
y<br />
)cos( θ<br />
x<br />
)<br />
⎢<br />
⎣<br />
cos( θ<br />
z<br />
)cos( θ<br />
x<br />
)<br />
cos( θ )cos( θ )<br />
x<br />
2<br />
cos ( θ )<br />
cos( θ )cos( θ )<br />
z<br />
y<br />
y<br />
y<br />
cos( θ ⎤<br />
x<br />
)cos( θ<br />
z<br />
) ⎡q<br />
⎥<br />
cos( θ ⋅<br />
⎢<br />
y<br />
)cos( θ<br />
z<br />
) ⎥ ⎢<br />
q<br />
2<br />
cos ( θ ⎥<br />
⎦<br />
⎢<br />
z<br />
) ⎣q<br />
x<br />
y<br />
z<br />
⎤<br />
⎥<br />
⎥<br />
⎥⎦<br />
(2.36)<br />
Il termine raccolto tra i due vettori <strong>di</strong> spostamento rappresenta la matrice <strong>di</strong> rigidezza della molla, e<br />
andrà assemblata ai termini della matrice <strong>di</strong> rigidezza totale corrispondenti ai gra<strong>di</strong> <strong>di</strong> libertà vincolati<br />
dalla molla.<br />
34
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
6. Deformazioni anelastiche<br />
Se sono presenti delle deformazioni anelastiche ε i (ritiro, temperatura…), le tensioni si scrivono:<br />
σ = D ⋅ ε − ε )<br />
(2.37)<br />
(<br />
i<br />
per cui il lavoro interno scritto al punto (1.15) assume ora la forma più generale:<br />
∫<br />
∫<br />
L = δ ε ⋅σ<br />
⋅ dV = δ ε ⋅ D ⋅ ( ε − ε ) ⋅ dV<br />
(2.38)<br />
i<br />
Ve<br />
T<br />
Ve<br />
T<br />
i<br />
Dalla (2.38) svolgendo il prodotto e separando i due integrali si nota che alla variazione <strong>di</strong> energia <strong>di</strong><br />
deformazione calcolata con le deformazioni totali, viene sottratta la parte dovuta alle deformazioni<br />
anelastiche. Essendo note, questo termine viene portato a destra dell’uguale nell’equazione (1.5), e<br />
determina il contributo al vettore dei carichi nodali dato dalle deformazioni anelastiche.<br />
∫<br />
F = B ⋅ D ⋅ε ⋅ dV<br />
(2.39)<br />
i<br />
V<br />
t<br />
i<br />
Il vettore (2.39) è relativo ad un solo elemento, per cui è da utilizzare in fase <strong>di</strong> assemblaggio del<br />
vettore totale dei carichi nodali equivalenti.<br />
E’ da ricordare poi che se sono presenti delle deformazioni anelastiche, le tensioni, dopo avere<br />
assemblato e risolto il sistema, vanno sempre calcolate utilizzando la (2.37).<br />
35
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
7. Armatura embedded<br />
Vi sono <strong>di</strong>versi meto<strong>di</strong> per modellare l’armatura presente nel calcestruzzo in un co<strong>di</strong>ce <strong>di</strong> calcolo<br />
numerico. Un modo particolarmente efficace, consiste nel trattare la barra <strong>di</strong> armatura come se fosse<br />
un corpo (avente caratteristiche meccaniche proprie) immerso nell’elemento finito. L’apporto <strong>di</strong><br />
rigidezza alla matrice<br />
K dell’elemento può essere calcolato come segue (la formulazione viene<br />
e<br />
eseguita per l’elemento incompatibile, per quello compatibile è analoga) [Kwa].<br />
B<br />
z<br />
A<br />
y<br />
x<br />
Figura 2.8: Elemento embedded all'interno <strong>di</strong> un elemento finito.<br />
Siano A e B i punti <strong>di</strong> frontiera della barra <strong>di</strong> armatura per l’elemento considerato, sia L la lunghezza<br />
del tratto <strong>di</strong> armatura presente nell’elemento, la deformazione della barra, intesa come biella, vale:<br />
sa<br />
− sb<br />
ε<br />
b<br />
=<br />
(2.40)<br />
L<br />
dove con s a e s b si sono in<strong>di</strong>cati gli spostamenti dei punti <strong>di</strong> frontiera in <strong>di</strong>rezione della barra (sono<br />
scalari). La <strong>di</strong>rezione della barra viene definita tramite i coseni <strong>di</strong>rettori della retta che parte dal punto<br />
A e passa per il punto B. Gli spostamenti lungo la barra valgono:<br />
s<br />
s<br />
a<br />
b<br />
= q cos( θ ) + q cos( θ ) + q cos( θ ) = T ⋅ q<br />
xa<br />
xb<br />
x<br />
x<br />
ya<br />
yb<br />
y<br />
y<br />
za<br />
zb<br />
z<br />
z<br />
a<br />
= q cos( θ ) + q cos( θ ) + q cos( θ ) = T ⋅ q<br />
(2.41)<br />
b<br />
36
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
dove T è il vettore riga 1x3 che contiene i coseni <strong>di</strong>rettori, e q i è il vettore colonna 3x1 che contiene<br />
gli spostamenti del generico punto i (in generale non coincidente con un nodo). É possibile valutare<br />
gli spostamenti dei punti A e B tramite l’interpolazione degli spostamenti nodali eseguita con le<br />
funzioni <strong>di</strong> forma:<br />
s<br />
a<br />
= T ⋅ q<br />
a<br />
= T ⋅ N<br />
A<br />
⋅ q<br />
s<br />
b<br />
= T ⋅ q = T ⋅ N ⋅ q<br />
(2.42)<br />
b<br />
B<br />
Dove il vettore q 33x1 racchiude tutti gli spostamenti dei no<strong>di</strong> e le matrici delle funzioni <strong>di</strong> forma<br />
sono valutate nei punti A e B. La deformazione assiale della barra <strong>di</strong> armatura risulta:<br />
ε<br />
b<br />
=<br />
1<br />
( T ⋅ N ⋅ q − T ⋅ N ⋅ q) ⋅ = T ⋅ ( N − N )<br />
A<br />
B<br />
L<br />
A<br />
B<br />
1<br />
⋅ q ⋅<br />
L<br />
( N − N )<br />
1<br />
δε<br />
b<br />
= T ⋅ ⋅δ<br />
q ⋅<br />
(2.43)<br />
A B<br />
L<br />
La tensione nella barra, tenendo conto anche <strong>di</strong> deformazioni anelastiche in modo da poter modellare<br />
anche le armature <strong>di</strong> precompressione, è la stessa del (2.37) scritta come legame uniassiale:<br />
σ<br />
b<br />
= E ⋅ ε<br />
b<br />
− ε<br />
b<br />
)<br />
(<br />
i<br />
La variazione dell’energia <strong>di</strong> deformazione della barra risulta:<br />
δ U<br />
δU<br />
=<br />
∫<br />
V<br />
δε ⋅σ<br />
⋅ dV<br />
b<br />
b<br />
T<br />
T ⎡<br />
1 ⎤<br />
( N − N ) ⋅T<br />
⋅ E ⋅ T ⋅ ( N − N ) ⋅ q ⋅ −<br />
bi<br />
dV<br />
T 1<br />
= ∫δ<br />
q ⋅ ⋅<br />
L<br />
A B ⎢<br />
ε<br />
A B<br />
⎣<br />
L ⎥<br />
⎦<br />
⋅<br />
V<br />
(2.44)<br />
Ipotizzando <strong>di</strong> valutare E nel baricentro della barra, l’integrale contiene solo delle costanti.<br />
37
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
Sviluppando le parentesi è possibile identificare due termini, il primo è una una matrice <strong>di</strong> rigidezza<br />
33x33, che rappresenta l’aumento <strong>di</strong> rigidezza dell’elemento finito dovuto alla barra embedded:<br />
K<br />
b<br />
T T<br />
( N − N ) ⋅T<br />
⋅T<br />
⋅ ( N − N )<br />
A ⋅ Ec<br />
= ⋅<br />
(2.45)<br />
A B<br />
A B<br />
L<br />
da notare che il prodotto delle due matrici T risulta pari alla matrice (2.36) utilizzata per i vincoli<br />
elastici:<br />
~<br />
T = T<br />
T<br />
⋅T<br />
2<br />
⎡ cos ( θ<br />
x<br />
)<br />
⎢<br />
= ⎢cos(<br />
θ<br />
y<br />
)cos( θ<br />
x<br />
)<br />
⎢<br />
⎣<br />
cos( θ<br />
z<br />
)cos( θ<br />
x<br />
)<br />
cos( θ )cos( θ )<br />
x<br />
2<br />
cos ( θ )<br />
cos( θ )cos( θ )<br />
z<br />
y<br />
y<br />
y<br />
cos( θ ⎤<br />
x<br />
)cos( θ<br />
z<br />
)<br />
⎥<br />
cos( θ<br />
y<br />
)cos( θ<br />
z<br />
) ⎥<br />
2<br />
cos ( θ ) ⎥<br />
z ⎦<br />
(2.46)<br />
Il secondo termine che deriva dalla (2.44) è il vettore delle forze nodali equivalenti alla<br />
precompressione:<br />
F<br />
p<br />
c<br />
T T<br />
( N − N ) ⋅T<br />
⋅ε<br />
bi<br />
= A⋅<br />
E ⋅<br />
(2.47)<br />
A<br />
B<br />
T T<br />
T T<br />
Si nota che i prodotti matriciali ( N − N ) ⋅T<br />
⋅T<br />
⋅ ( N − N ) e ( N N ) ⋅T<br />
⋅ε<br />
bi<br />
A<br />
B<br />
A<br />
B<br />
A<br />
− forniscono<br />
delle costanti, perciò non è necessaria la loro valutazione ad ogni passo <strong>di</strong> carico in caso <strong>di</strong><br />
comportamento non lineare del materiale.<br />
La <strong>di</strong>fficoltà è ora nel valutare le matrici delle funzioni <strong>di</strong> forma nei punti A e B, in coor<strong>di</strong>nate<br />
naturali. I punti A e B sono noti infatti in coor<strong>di</strong>nate cartesiane, e la trasformazione che porta le<br />
coor<strong>di</strong>nate nel sistema naturale è nota solamente se l’esaedro non è <strong>di</strong>storto:<br />
B<br />
ξ = ( x − xc ) / a η = ( y − yc ) / b ρ = ( z − zc ) / c<br />
(2.48)<br />
dove il punto c è il baricentro dell’elemento, ed a, b, c sono i suoi semilati. In caso contrario è<br />
necessario il calcolo delle coor<strong>di</strong>nate nel sistema naturale tramite iterazione.<br />
38
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
Il metodo più semplice è quello <strong>di</strong> eseguire l’algoritmo della bisezione una volta per ogni coor<strong>di</strong>nata.<br />
Ovvero applicare 3 volte un metodo con una velocità <strong>di</strong> convergenza lineare. Molto più veloce è<br />
l’algoritmo tangente <strong>di</strong> Newton, velocità <strong>di</strong> convergenza quadratica.<br />
L’incremento <strong>di</strong> coor<strong>di</strong>nata x si può scrivere come:<br />
dx dx dx<br />
dx = dξ<br />
+ dη<br />
+ dρ<br />
dξ<br />
dη<br />
dρ<br />
quin<strong>di</strong>:<br />
⎡ ∂x<br />
⎢<br />
⎡dx⎤<br />
⎢<br />
∂ξ<br />
⎢ ⎥ ⎢ ∂y<br />
⎢<br />
dy<br />
⎥<br />
=<br />
⎢∂ξ<br />
⎢⎣<br />
dz⎥⎦<br />
⎢ ∂z<br />
⎢<br />
⎢⎣<br />
∂ξ<br />
∂x<br />
∂η<br />
∂y<br />
∂η<br />
∂z<br />
∂η<br />
∂x<br />
⎤<br />
∂ρ<br />
⎥<br />
⎥ ⎡dξ<br />
⎤<br />
∂y<br />
⎥ ⋅<br />
⎢ ⎥<br />
⎢<br />
dη<br />
⎥<br />
= J<br />
∂ρ<br />
⎥<br />
∂z<br />
⎥ ⎢⎣<br />
dρ⎥⎦<br />
⎥<br />
∂ρ<br />
⎥⎦<br />
T<br />
⎡dξ<br />
⎤<br />
⋅<br />
⎢ ⎥<br />
⎢<br />
dη<br />
⎥<br />
⎢⎣<br />
dρ⎥⎦<br />
⎡dξ<br />
⎤<br />
→<br />
⎢<br />
dη<br />
⎥<br />
= [ J ]<br />
⎢ ⎥<br />
⎢⎣<br />
dρ⎥⎦<br />
T −1<br />
⎡dx⎤<br />
⋅<br />
⎢ ⎥<br />
⎢<br />
dy<br />
⎥<br />
⎢⎣<br />
dz⎥⎦<br />
(2.49)<br />
8. Armatura <strong>di</strong>ffusa<br />
L’armatura modellata in modo embedded, è una buona approssimazione della situazione fisica della<br />
struttura, e risulta efficiente quando le armature risultano concentrate in alcune zone (armatura<br />
longitu<strong>di</strong>nale delle travi, cavi <strong>di</strong> precompressione…). Se però l’armatura risulta <strong>di</strong>stribuita (armatura<br />
a taglio delle travi, reti <strong>di</strong> armatura…) può essere utile poterla trattare come se fosse omogeneamente<br />
<strong>di</strong>stribuita all’interno dell’elemento finito [BMR2]. In questo caso è sufficiente sommare alla matrice<br />
D del calcestruzzo la matrice<br />
c<br />
sistema <strong>di</strong> riferimento globale.<br />
D dell’armatura omogeneizzata e opportunamente ruotata nel<br />
s<br />
s<br />
T<br />
D = T<br />
s<br />
'<br />
⋅D<br />
⋅T<br />
s<br />
s<br />
(2.50)<br />
39
Formulazione dell’elemento finito tri<strong>di</strong>mensionale Cap. 2<br />
dove<br />
'<br />
D è la matrice 6x6 dell’armatura omogeneizzata avente come unico elemento non nullo quello<br />
s<br />
appartenente alla posizione (1,1) <strong>di</strong> valore sarà<br />
ρ ⋅E<br />
(ρ s è la percentuale <strong>di</strong> armatura presente).<br />
s<br />
s<br />
Nella 2.50<br />
T è la matrice che ruota il tensore, dal sistema <strong>di</strong> riferimento x’ - y’ - z’ solidale con<br />
s<br />
l’asse dell’armatura, nel sistema globale x - y - z. Se vi sono più armature, <strong>di</strong>fferentemente orientate,<br />
la matrice D risulterà:<br />
∑<br />
D = D + T ⋅D' ⋅T<br />
(2.51)<br />
c<br />
i<br />
T<br />
si<br />
si<br />
si<br />
In questa formulazione si è assunto che il materiale fosse isotropo, se così non fosse anche le<br />
caratteristiche meccaniche del calcestruzzo andrebbero riportate nel sistema <strong>di</strong> riferimento globale.<br />
40
Legami costitutivi e problema non lineare Cap. 3<br />
Capitolo 3<br />
Legami costitutivi e problema non lineare<br />
La non linearità si può presentare in un problema strutturale, sotto <strong>di</strong>verse forme.<br />
• Ogni volta che un corpo subisce gran<strong>di</strong> spostamenti e/o gran<strong>di</strong> deformazioni si ha un problema <strong>di</strong><br />
non linearità geometrica. Per superare le <strong>di</strong>fficoltà fisico-matematiche legate ha questo tipo <strong>di</strong><br />
problema, è necessario :<br />
- calcolare l’equilibrio della struttura rispetto al corpo deformato<br />
- mo<strong>di</strong>ficare le relazioni lineari deformazione – spostamento viste nel capitolo 2 aggiungendo<br />
anche i termini <strong>di</strong> or<strong>di</strong>ne superiore.<br />
• Un altro tipo <strong>di</strong> non linearità si manifesta quando si considerano particolari con<strong>di</strong>zioni al contorno<br />
della struttura (ad es. il contatto tra due superfici). In questo caso si parlerà <strong>di</strong> non linearità <strong>di</strong><br />
contorno.<br />
• Se il materiale <strong>di</strong> cui è costituita la struttura, presenta una legge tensione – deformazione non<br />
lineare, si ha un problema <strong>di</strong> non linearità <strong>di</strong> materiale. In questo caso, anche se le deformazioni e gli<br />
spostamenti vengono supposti “piccoli” (in modo che sia lecito calcolare le tensioni riferendosi alla<br />
geometria indeformata), le tensioni non sono più linearmente proporzionali alle deformazioni. Il<br />
problema più <strong>di</strong>fficile è quello <strong>di</strong> determinare una legge costitutiva per il materiale che rappresenti il<br />
più correttamente possibile la situazione reale.<br />
In questo lavoro si affronta il problema della non linearità <strong>di</strong> materiale, nel seguito del capitolo<br />
verranno esposti i legami costitutivi utilizzati ed i più comuni algoritmi numerici utilizzati per la<br />
soluzione dei sistemi <strong>di</strong> equazioni non lineari.<br />
1. La non linearità <strong>di</strong> materiale<br />
I materiali comunemente usati nell’ingegneria, se sottoposti ad azioni chimiche, ra<strong>di</strong>azioni, carichi<br />
meccanici o altro, possono sviluppare nel loro interno delle microfessure che ne deteriorano le<br />
caratteristiche meccaniche. Questo fenomeno è chiamato processo <strong>di</strong> danneggiamento.<br />
41
Legami costitutivi e problema non lineare Cap. 3<br />
Numerosi legami costitutivi si rifanno appunto alla meccanica del danneggiamento, in questi modelli<br />
il deterioramento del materiale è descritto tramite delle variabili interne D i (introdotte da Kachanov<br />
nel 1958) che in<strong>di</strong>cano la densità delle microfessure presenti nel materiale. Il processo <strong>di</strong><br />
danneggiamento può essere isotropo o anisotropo. L’assunzione dell’isotropia del materiale e del<br />
processo <strong>di</strong> danneggiamento, è in pratica sufficiente per dare una buona stima del comportamento<br />
generale del materiale sia sotto carico monotono sia sotto carico ciclico. L’ipotesi d’isotropia produce<br />
inoltre notevoli semplificazioni nei calcoli, necessari per seguire l’evoluzione del danno. Nella<br />
descrizione del comportamento <strong>di</strong> strutture in calcestruzzo armato, l’assunzione dell’isotropia <strong>di</strong><br />
danneggiamento comporta però notevoli errori <strong>di</strong> valutazione, in special modo per quanto riguarda la<br />
portanza <strong>di</strong> pannelli armati soggetti a stato <strong>di</strong> sforzo <strong>di</strong> puro taglio. Per questo motivo si rende<br />
necessaria l’introduzione <strong>di</strong> una legge costitutiva non isotropa, che tenga conto della <strong>di</strong>versità <strong>di</strong><br />
danneggiamento nella <strong>di</strong>rezione delle trazioni rispetto a quella delle compressioni. In questo capitolo<br />
verranno esposti il modello <strong>di</strong> danneggiamento isotropo <strong>di</strong> Mazars e <strong>di</strong> Cervera per carichi monotoni<br />
crescenti, ed un legame costitutivo ortotropo.<br />
2. Definizione della variabile <strong>di</strong> danno<br />
Si consideri un solido danneggiato e se ne isoli un elemento <strong>di</strong> volume sufficientemente grande da<br />
essere rappresentativo dello stato del materiale.<br />
n<br />
Figura 3.1: Volume rappresentativo.<br />
42
Legami costitutivi e problema non lineare Cap. 3<br />
Sia S l’area della superficie <strong>di</strong> normale n e S r l’area S depurata dai microvuoti causati dal processo <strong>di</strong><br />
danneggiamento (sezione reale), risulta [LeC]:<br />
S r < S ; S d = S – S r (3.1)<br />
Dove S d in<strong>di</strong>ca l’area delle microfessure presenti nella sezione considerata, mentre il danneggiamento<br />
locale relativo alla <strong>di</strong>rezione n è definito come:<br />
Sd<br />
Dn = (3.2)<br />
S<br />
D n potrà dunque assumere i seguenti valori:<br />
D n = 0<br />
lo stato <strong>di</strong> danno è nullo (materiale vergine)<br />
D n = 1<br />
l’elemento è fessurato secondo un piano <strong>di</strong> normale n<br />
0 < D n < 1 l’elemento è danneggiato<br />
In caso <strong>di</strong> danneggiamento isotropo il valore D n non <strong>di</strong>pende dalla normale n considerata, per cui D n è<br />
una quantità scalare. In caso <strong>di</strong> danneggiamento anisotropo il danneggiamento è rappresentato tramite<br />
una variabile tensoriale.<br />
Il modello sviluppato da Mazars considera un danneggiamento isotropo, perciò è lecito porre :<br />
D = D n (3.3)<br />
Ciò equivale ad affermare che le microfessure causate dal danneggiamento sono orientate<br />
uniformemente in tutte le <strong>di</strong>rezioni.<br />
43
Legami costitutivi e problema non lineare Cap. 3<br />
3. Definizione dello stato <strong>di</strong> sforzo effettivo<br />
Con riferimento ad un caso <strong>di</strong> sforzo uniassiale, sia F la forza applicata ad una sezione <strong>di</strong> un prisma<br />
<strong>di</strong> base S. Lo sforzo risulta perciò:<br />
σ = F per cui lo stato <strong>di</strong> sforzo reale è:<br />
S<br />
σ<br />
F F<br />
r = = =<br />
σ<br />
(3.4)<br />
Sr<br />
S⋅( 1−D)<br />
(1−<br />
D)<br />
Dovendo essere 0 ≤D < 1 si deve necessariamente avere σr = σ per un materiale non danneggiato<br />
(D = 0), e σr → ∞ per un materiale a rottura ( D →1). Si riporta come esempio i risultati in termini <strong>di</strong><br />
σ e <strong>di</strong> σ r <strong>di</strong> una prova <strong>di</strong> compressione:<br />
Tensione (Mpa)<br />
0 5 10 15<br />
0 5 10 15 20 25 30 35 40<br />
Spostamenti impressi (mm)<br />
σ r<br />
σ<br />
Figura 3.2: Confronto tra sforzo effettivo e sforzo <strong>di</strong> Cauchy.<br />
In caso <strong>di</strong> sforzo pluriassiale, dato che il rapporto S/S r non <strong>di</strong>pende dalla normale n l’operatore (1-D)<br />
si applica a tutte le componenti del tensore degli sforzi, perciò :<br />
σ<br />
σ r =<br />
(3.5)<br />
( 1−<br />
D)<br />
44
Legami costitutivi e problema non lineare Cap. 3<br />
4. Ipotesi d’equivalenza nelle deformazioni<br />
Supponendo che il comportamento del materiale a deformazione non sia influenzato dal<br />
danneggiamento si può affermare che :<br />
il comportamento a deformazione monoassiale o pluriassiale <strong>di</strong> un materiale danneggiato, è ottenuto<br />
dalla legge <strong>di</strong> comportamento del materiale vergine, in cui lo stato <strong>di</strong> sforzo sia quello reale [LeC].<br />
σ<br />
σ<br />
σ r<br />
1 2 3<br />
⇒<br />
D = 0 D D = 0<br />
σ<br />
σ<br />
σ r<br />
Figura 3.3: Equivalenza nelle deformazioni tra il materiale danneggiato sotto-posto a sforzo <strong>di</strong> Cauchy (2), e<br />
lo stesso materiale sottoposto sforzo reale (3).<br />
La legge d’elasticità lineare mono<strong>di</strong>mensionale <strong>di</strong> un materiale danneggiato si scrive :<br />
r<br />
ε r = σ = σ<br />
(3.6)<br />
E (1 − D)<br />
⋅ E<br />
per cui si può definire un nuovo modulo E per il materiale danneggiato, pari a :<br />
Er<br />
= ( 1 − D)<br />
⋅ E<br />
(3.7)<br />
Questa semplice scrittura mostra come il processo <strong>di</strong> danneggiamento riduce le caratteristiche<br />
meccaniche del materiale. L’ipotesi introdotta non è rigorosa, in quanto suppone che i <strong>di</strong>versi<br />
comportamenti del materiale (elasticità, viscosità ...) siano influenzati dalla variabile D tutti allo<br />
stesso modo, ma la sua semplicità permette <strong>di</strong> formulare regole semplici ed efficaci.<br />
45
Legami costitutivi e problema non lineare Cap. 3<br />
5. La legge <strong>di</strong> evoluzione <strong>di</strong> Mazars<br />
Il modello <strong>di</strong> Mazars [Maz],[MaC] è fondato sulle seguenti ipotesi :<br />
1) Il materiale è elastico danneggiabile.<br />
2) Il danneggiamento avviene a causa d’estensioni presenti lungo almeno una del-le <strong>di</strong>rezioni<br />
principali <strong>di</strong> deformazioni ε i.<br />
3) Il danneggiamento è isotropo.<br />
4) Il percorso <strong>di</strong> carico è monotono crescente.<br />
5) Il danno evolve solo se si è superato un certo valore soglia.<br />
Dato che il danno evolve a causa della presenza d’estensioni, e che il danneggiamento deve <strong>di</strong>pendere<br />
da un’unica variabile scalare D, è necessario definire una deformazione equivalente (ε e ) che consenta<br />
<strong>di</strong> caratterizzare lo stato d’estensione <strong>di</strong> un generico punto del materiale a partire dalle deformazioni<br />
principali in esso presenti.<br />
La definizione proposta da Mazars è :<br />
2<br />
∑ 〈 εi〉<br />
i +<br />
ε e =<br />
(3.8)<br />
Dove ε i rappresenta la deformazione principale nella <strong>di</strong>rezione i<br />
ε =<br />
〈 i〉<br />
+ εi se εi ≥ 0<br />
ε i〉<br />
= 0 se εi < 0<br />
〈 +<br />
La soglia <strong>di</strong> danneggiamento è quin<strong>di</strong> definita come:<br />
f ( D)<br />
= ε e − k(<br />
D)<br />
= 0<br />
(3.9)<br />
Dove k(D) =<br />
ε d0 rappresenta la soglia d’inizio danneggiamento, pari alla deformazione <strong>di</strong> sforzo<br />
massimo in una prova <strong>di</strong> trazione monoassiale. Sostituendo la definizione (3.8) nella (3.9) si trova,<br />
nello spazio delle deformazioni principali, l’equazione <strong>di</strong> una sfera.<br />
46
Legami costitutivi e problema non lineare Cap. 3<br />
E’ così garantita la stessa importanza ad ognuna delle tre deformazioni principali. Nel rispetto della<br />
<strong>di</strong>seguaglianza <strong>di</strong> Clausius-Duhem, l’equazione che regola l’evolversi del danneggiamento assume la<br />
forma:<br />
dD<br />
dt<br />
dD<br />
dt<br />
= 0<br />
d〈<br />
εe〉<br />
= F(<br />
ε e)<br />
⋅<br />
dt<br />
+<br />
se f = 0 e<br />
se f = 0 e<br />
df<br />
dt<br />
df<br />
dt<br />
< 0 o f < 0 (3.10)<br />
= 0<br />
Il danneggiamento può avvenire per sforzi <strong>di</strong> compressione o <strong>di</strong> trazione, nel primo caso le<br />
estensioni si producono per effetto Poisson nella <strong>di</strong>rezione perpen<strong>di</strong>colare allo sforzo, nel secondo si<br />
verificano invece nella <strong>di</strong>rezione parallela allo sforzo. Questi <strong>di</strong>versi comportamenti causano<br />
<strong>di</strong>ssimetria nella risposta <strong>di</strong> uno stesso materiale a sforzi <strong>di</strong> trazione e <strong>di</strong> compressione. Per cogliere<br />
quest’aspetto è necessario introdurre nel modello due variabili scalari D t e D c , rappresentative del<br />
danneggiamento in trazione ed in compressione, e governate da leggi d’evoluzione <strong>di</strong>fferenti. In caso<br />
<strong>di</strong> sollecitazione uniassiale :<br />
Dt = Ft( εe)<br />
; Dc = Fc( εe)<br />
(3.11)<br />
In caso <strong>di</strong> sollecitazione pluriassiale entrambe le sollecitazioni contribuiscono all’evoluzione del<br />
danneggiamento, per cui Mazars ha proposto <strong>di</strong> considerare la seguente combinazione:<br />
D = α<br />
α t ⋅ Dt<br />
+ c ⋅ Dc<br />
(3.12)<br />
I parametri αt e αc sono definiti considerando la partizione del tensore degli sforzi nelle sue parti <strong>di</strong><br />
trazione e <strong>di</strong> compressione :<br />
σ = 〈 σ 〉 σ<br />
+ +〈 〉 −<br />
47
Legami costitutivi e problema non lineare Cap. 3<br />
Dove 〈 σ 〉 + in<strong>di</strong>ca la parte positiva del tensore degli sforzi mentre 〈 σ 〉 − la parte negativa. Attraverso<br />
questa partizione si può giungere a definire le deformazioni legate agli sforzi positivi ed a quelli<br />
negativi:<br />
tr ( σ ) = tr(<br />
〈 σ 〉 + ) + tr(<br />
〈 σ 〉 −)<br />
(3.13)<br />
1+<br />
ν ν<br />
εt<br />
= ⋅ 〈 σ 〉 − ⋅tr(<br />
〈 σ<br />
E E<br />
+ 〉+<br />
1+<br />
ν ν<br />
εc<br />
= ⋅ 〈 σ 〉 − ⋅ tr(<br />
〈 σ<br />
E E<br />
− 〉−<br />
)<br />
)<br />
Infine i parametri αt e αc presenti nell’equazione (3.12) sono definiti come:<br />
εti<br />
⋅ ( εti<br />
+ εci)<br />
εti<br />
⋅εi<br />
α t = ∑ Hi<br />
⋅<br />
= ∑ Hi<br />
⋅<br />
(3.14)<br />
i<br />
2<br />
i 2<br />
εe<br />
εe<br />
α c =<br />
∑<br />
i<br />
εci<br />
⋅ ( εti<br />
+ εci)<br />
εci<br />
⋅εi<br />
Hi<br />
⋅<br />
= ∑ Hi<br />
⋅<br />
2<br />
i 2<br />
εe<br />
εe<br />
Con H i = 0 se εi ≥ 0 , ed H i = 0 se εi < 0 .<br />
Per le variabili D t e D c sono state invece proposte, basandosi su risultati sperimentali, le seguenti<br />
espressioni:<br />
εd<br />
0 ⋅ (1 − At)<br />
At<br />
Dt<br />
= 1−<br />
−<br />
(3.15)<br />
εe<br />
exp( Bt<br />
⋅ ( εe<br />
− εd<br />
0))<br />
εd<br />
0 ⋅ (1 − Ac)<br />
Dc<br />
= 1−<br />
−<br />
εe<br />
exp( Bc<br />
Ac<br />
⋅ ( εe<br />
− εd<br />
0))<br />
Dove ε do è la soglia d’inizio danneggiamento e A t , B t , A c , e B c sono dei parametri caratteristici del<br />
materiale identificabili sperimentalmente con prove <strong>di</strong> compressione uniassiale (A c e B c ) e <strong>di</strong><br />
flessione (A t e B t ).<br />
48
Legami costitutivi e problema non lineare Cap. 3<br />
Assumendo A c = 1,1; B c = 1800; A t = 0,7; B t = 10000; ed0 = 0,0001; E = 1 KN/cm 2 ; ν = 0,2; le curve<br />
D c e D t assumono il seguente aspetto :<br />
1<br />
Valore del danno<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
D t<br />
D c<br />
0<br />
2.99<br />
2.79<br />
2.59<br />
2.39<br />
2.19<br />
1.99<br />
1.79<br />
1.59<br />
1.39<br />
1.19<br />
0.99<br />
0.79<br />
0.59<br />
0.39<br />
0.19<br />
0<br />
Deformazione equivalente (in millesimi)<br />
Figura 3.4: Confronto tra l'evoluzione del danno a trazione con l'evoluzione a compressione.<br />
In caso <strong>di</strong> sforzo uniassiale è possibile trovare analiticamente le curve (σ-ε). Infatti, le equazioni<br />
(3.5.6-7-8) vengono riscritte come segue:<br />
se lo sforzo è uniassiale <strong>di</strong> trazione secondo la <strong>di</strong>rezione x :<br />
αt = 1 ; αc = 0 ; D = D t (ε e ) = D t (ε x )<br />
se lo sforzo è uniassiale <strong>di</strong> compressione secondo la <strong>di</strong>rezione x :<br />
αt = 0 ; αc = 1 ; D = D c (ε e ) = D c (ε y, ε z )<br />
per cui utilizzando l’equazione (3.6) si ricava :<br />
σ = ( 1− D)<br />
⋅E⋅<br />
εx (3.16)<br />
49
Legami costitutivi e problema non lineare Cap. 3<br />
con D = D t o D c , secondo i casi. Si hanno le due curve:<br />
Tensione<br />
0,0003<br />
0,00025<br />
0,0002<br />
0,00015<br />
0,0001<br />
0,00005<br />
0<br />
σ c<br />
σ t<br />
Deformazione principale<br />
Figura 3.5: Confronto tra curve <strong>di</strong> sforzo in materiale danneggiato a trazione o a compressione monoassiale (si<br />
è usata una scala <strong>di</strong>versa per ogni curva).<br />
Dai risultati numerici ottenuti (ve<strong>di</strong> par. 8.6) nel caso <strong>di</strong> compressione biassiale, si nota che il<br />
modello sottostima <strong>di</strong> molto la resistenza ultima del materiale rispetto ai risultati sperimentali. Questa<br />
è una conseguenza del fatto che il modello è stato formulato per campi <strong>di</strong> tensione uniassiale, e poi<br />
esteso campi <strong>di</strong> tensioni pluriassiali. Si può ottenere un certo miglioramento dei risultati introducendo<br />
un fattore correttivo γ( σi)<br />
≤ 1 [Per] in modo che la nuova deformazione equivalente da usare nel solo<br />
calcolo delle variabili D t e D c sia:<br />
εe = γ( σi) ⋅ εe<br />
con γ( σi)<br />
=<br />
∑<br />
i<br />
∑<br />
i<br />
(〈 σi〉<br />
−)<br />
(〈 σi〉<br />
−)<br />
2<br />
(3.17)<br />
50
Legami costitutivi e problema non lineare Cap. 3<br />
6. La legge d’evoluzione <strong>di</strong> Cervera<br />
Considerando una generica norma scalare τ t<br />
del tensore delle deformazioni o del tensore delle<br />
tensioni elastiche (non danneggiate) è possibile esprimere il criterio <strong>di</strong> danno [Cer] come :<br />
t t t t<br />
F( τ , r ) = τ − r ≤ 0 per ogni t ≥ 0 (3.18)<br />
τ t viene chiamata deformazione equivalente, ed r t è il massimo valore raggiunto dalla norma τ t sino<br />
all’istante considerato. Il valore iniziale r 0 è una proprietà del materiale, ed in ogni istante deve essere<br />
r t<br />
≥ r 0 . L’espressione (3.18) definisce una superficie limite nello spazio delle deformazioni o delle<br />
tensioni elastiche. Il danno aumenta quando la norma τ t supera il massimo valore raggiunto da r, in<br />
particolare il danno inizia quando la norma τ t supera il valore <strong>di</strong> soglia iniziale r 0 .<br />
Ad ogni istante i valori del danno e <strong>di</strong> soglia verranno aggiornati secondo:<br />
r t = max( r<br />
0 , t<br />
s ) con 0 ≤ s ≤ t<br />
(3.19)<br />
D<br />
0<br />
t<br />
r ⎡ r ⎤<br />
) = 1−<br />
exp⎢A⋅<br />
(1 − )<br />
t<br />
⎥<br />
r ⎣ r ⎦<br />
t<br />
( r<br />
0<br />
con 0<<br />
0 t<br />
r ≤ r<br />
(3.20)<br />
La funzione (3.20) che definisce la variabile <strong>di</strong> danno risulta essere monotona crescente e <strong>di</strong> valori<br />
compresi tra 0 ed 1.<br />
La norma τ t definisce la forma della superficie limite <strong>di</strong> danno, per cui a seconda del modello <strong>di</strong><br />
danneggiamento considerato essa assumerà espressioni <strong>di</strong>fferenti.<br />
• Modello <strong>di</strong> danno simmetrico a trazione e compressione.<br />
Viene assunta la norma:<br />
= 2 ⋅ Ψ<br />
t<br />
τ<br />
e<br />
ovvero<br />
t t<br />
τ = σ : C :<br />
e<br />
σ<br />
t<br />
e<br />
(3.21)<br />
51
Legami costitutivi e problema non lineare Cap. 3<br />
Dove Υ e<br />
è l’energia elastica corrispondente al materiale non danneggiato. Nello spazio delle tensioni<br />
elastiche la superficie limite assume la forma <strong>di</strong> un ellissoide con centro nell’origine (una sfera se<br />
ν =0). Il modello ha quin<strong>di</strong> la stessa resistenza a trazione che a compressione, perciò non è adeguato<br />
allo stu<strong>di</strong>o <strong>di</strong> materiali come il calcestruzzo che possiede una resistenza a compressione circa 10 volte<br />
superiore <strong>di</strong> quella a trazione.<br />
• Modello con danno in sola trazione<br />
La deformazione equivalente viene ridefinita come:<br />
t t+ t+<br />
τ = σ : C: σ<br />
(3.22)<br />
e<br />
e<br />
Dove σ t+ 1 2 3<br />
e<br />
= [ ] T<br />
e<br />
σ<br />
e<br />
σ<br />
e<br />
0 0 0<br />
σ con σ e<br />
i<br />
pari alla tensione principale in <strong>di</strong>rezione i se<br />
questa è <strong>di</strong> trazione, 0 se è <strong>di</strong> compressione. Questa definizione coincide con quella precedente solo<br />
nell’ottante delle tensioni triassiali <strong>di</strong> trazione, mentre nell’ottante <strong>di</strong> compressione triassiale<br />
definisce un dominio non limitato.<br />
• Modello con danneggiamento non simmetrico<br />
E’ possibile definire un comportamento non simmetrico tra trazione e compres-sione eseguendo una<br />
correzione <strong>di</strong> soglia nel modello simmetrico. L’espressione (3.21) viene sostituita da:<br />
1 −θ<br />
t<br />
= σ<br />
(3.23)<br />
e<br />
n<br />
t<br />
t<br />
τ ( θ + ) ⋅ σ : C :<br />
e<br />
Dove n è il rapporto tra la massima resistenza a compressione (f c ) e la massima resistenza a trazione<br />
(f t ), mentre θ <strong>di</strong>pende dallo stato tensionale:<br />
3<br />
∑i<br />
∑<br />
i<br />
σ<br />
= 1 e<br />
θ = (3.24)<br />
3<br />
σ<br />
i=<br />
1<br />
i<br />
e<br />
In particolare θ è 1 se le tensioni sono nel campo delle trazioni triassiali, 0 se sono nel campo delle<br />
compressioni triassiale, un valore tra 0 e 1 negli altri casi.<br />
52
Legami costitutivi e problema non lineare Cap. 3<br />
f<br />
σ<br />
f<br />
σ<br />
f<br />
f<br />
f<br />
σ<br />
f<br />
εu<br />
f<br />
σ<br />
f<br />
σ<br />
f<br />
σ<br />
εu<br />
f<br />
σ<br />
f<br />
σ<br />
f c<br />
f<br />
σ<br />
εu<br />
f c<br />
f<br />
Figura 3.6: Superfici limite per ν= 0 nei tre modelli: modello a danno simmetrico, modello con danno a sola trazione,<br />
modello con danno a trazione e compressione.<br />
Tutti i modelli <strong>di</strong>pendono da due parametri, r 0 ed A. r 0 governa l’inizio del danneggiamento, e viene<br />
fissato (partendo da una prova <strong>di</strong> trazione monoassiale) pari a:<br />
r<br />
0<br />
=<br />
f<br />
t<br />
E<br />
(3.25)<br />
Per il parametro A si ricava l’espressione:<br />
G<br />
f<br />
⋅ E 1 −1<br />
A = ( − )<br />
(3.26)<br />
2<br />
L ⋅ ( f ) 2<br />
t<br />
Dove E è il modulo <strong>di</strong> Young, G f è l’energia <strong>di</strong> frattura del materiale per unità <strong>di</strong> area, f t è la<br />
resistenza massima a trazione, ed L è la lunghezza caratteristica dell’elemento finito (per elementi<br />
triangolari CST si è usata<br />
L = 2 ⋅ Area ).<br />
53
Legami costitutivi e problema non lineare Cap. 3<br />
Dovendo la funzione <strong>di</strong> danneggiamento essere monotona crescente, il parametro A non può essere<br />
negativo. La con<strong>di</strong>zione A ≥ 0 pone una limitazione sulle <strong>di</strong>mensioni degli elementi finiti:<br />
G<br />
f<br />
⋅ E<br />
L ≤ (3.27)<br />
2<br />
f )<br />
( t<br />
Valore danno<br />
1<br />
0,8<br />
0,6<br />
0,4<br />
0,2<br />
0<br />
Aumento <strong>di</strong> A<br />
0 1 2 3 4<br />
Valore deformazione equivalente<br />
Figura 3.7: Influenza del parametro A sull'evoluzione del danno.<br />
1<br />
Valore danno<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
Diminuzione <strong>di</strong> r 0<br />
0 1 2 3 4<br />
Valore deformazione equivalente<br />
Figura 8: Influenza del valore <strong>di</strong> soglia sull’evoluzione del danno.<br />
Esaminando la risposta uniassiale della legge σ – ε del modello <strong>di</strong> Cervera al variare dell’unico<br />
parametro A, si nota che non viene rappresentata in maniera adeguata la risposta a compressione del<br />
calcestruzzo (fig. 3.9) per cui vengono stu<strong>di</strong>ati altri legami.<br />
54
Legami costitutivi e problema non lineare Cap. 3<br />
-25<br />
-25<br />
-20<br />
-20<br />
Tensione (MPa)<br />
-15<br />
Tensione (MPa)<br />
-15<br />
-10<br />
-10<br />
-5<br />
-5<br />
0<br />
0<br />
-0.0005<br />
-0.001<br />
-0.0015<br />
-0.002<br />
0<br />
0<br />
-0.0005<br />
-0.001<br />
-0.0015<br />
-0.002<br />
Deformazione<br />
Deformazione<br />
Figura 3.9: Legame σ-ε uniassiale in compressione per A=0.8 e per A=0.4<br />
7. La legge d’evoluzione <strong>di</strong> Rizzi<br />
Mantenendo le leggi che descrivono la soglia <strong>di</strong> danneggiamento <strong>di</strong> Cervera, Rizzi propone la<br />
seguente legge d’evoluzione del danno [Riz]:<br />
D(<br />
r<br />
t<br />
0 t<br />
[ B ⋅ ( r − r )]<br />
0<br />
r<br />
) = 1−<br />
(1 − A)<br />
⋅ − A⋅<br />
exp<br />
(3.28)<br />
t<br />
r<br />
Anche questo legame (ideato per lo stu<strong>di</strong>o della meccanica delle rocce) non rappresenta bene il<br />
comportamento del calcestruzzo.<br />
55
Legami costitutivi e problema non lineare Cap. 3<br />
8. La legge <strong>di</strong> evoluzione proposta per il modello isotropo<br />
Volendo meglio rappresentare il tratto <strong>di</strong> softening del calcestruzzo, si ricerca una formula adatta per<br />
la legge <strong>di</strong> evoluzione del danno. L’equazione analitica deve sod<strong>di</strong>sfare le seguenti caratteristiche. Per<br />
∂D<br />
r = r 0 deve essere D = 0, per r = r 0 deve essere D = 0 e la derivata = 0<br />
∂r<br />
r=r0<br />
L’equazione proposta è la seguente:<br />
( t<br />
) ⎡<br />
= 1 − exp ⎢ ⋅ (1 r<br />
D r<br />
A −<br />
⎣ r<br />
t<br />
) 2<br />
0<br />
⎤<br />
⎥<br />
⎦<br />
(3.29)<br />
con A un parametro <strong>di</strong>mensionale. Il legame uniassiale risulta ora:<br />
5<br />
0<br />
-0.009 -0.008 -0.007 -0.006 -0.005 -0.004 -0.003 -0.002 -0.001 0 0.001 0.002<br />
-5<br />
-10<br />
-15<br />
-20<br />
Tensione (MPa)<br />
-25<br />
-30<br />
-35<br />
Deformazione<br />
-40<br />
Figura 3.10: Relazione tensione - deformazione per la legge <strong>di</strong> danno proposta.<br />
56
Legami costitutivi e problema non lineare Cap. 3<br />
9. Un legame ortotropo<br />
Oltre ai legami isotropi esposti nei precedenti paragrafi, si è implementato anche un legame<br />
ortotropo, generalizzando in 3 <strong>di</strong>mensioni i legami uniassiali delle teorie costruite per analizzare stati<br />
<strong>di</strong> sforzo in regime membranale (CFT, MCFT, RA-STM); ne risulta un legame a fessura rotante e<br />
<strong>di</strong>ffusa all’interno dell’elemento finito. Il proce<strong>di</strong>mento seguito per il calcolo della matrice del<br />
materiale nel sistema <strong>di</strong> riferimento globale è il seguente:<br />
● Dalla soluzione elastica lineare ottenuta dall’analisi per elementi finiti, si ricavano le 3<br />
deformazioni principali e le 3 <strong>di</strong>rezioni principali utilizzando l’algoritmo <strong>di</strong> Jacobi sul tensore delle<br />
deformazioni (si ricavano autovalori ed autovettori).<br />
● Si forma la matrice <strong>di</strong> rigidezza del materiale nel sistema <strong>di</strong> riferimento principale, associando ad<br />
ogni <strong>di</strong>rezione principale una legge costitutiva uniassiale.Il modulo <strong>di</strong> Poisson viene assunto nullo,<br />
per cui la matrice del materiale in questo sistema <strong>di</strong> riferimento risulta <strong>di</strong>agonale. Definendo il<br />
parametro <strong>di</strong> softened ζ =<br />
compressione sono:<br />
1<br />
1+<br />
400⋅<br />
ε eq<br />
, i legami costitutivi considerati per il calcestruzzo in<br />
Ramo ascendente: ( ε ≤ζ<br />
⋅ )<br />
(3.30)<br />
d<br />
ε 0<br />
σ = ζ ⋅<br />
d<br />
f<br />
'<br />
c<br />
⎡ ⎛ ε<br />
d<br />
⎞ ⎛ ε<br />
d<br />
⎞<br />
⎢2<br />
⎜<br />
⎟ −<br />
⎜<br />
⎟<br />
⎢⎣<br />
⎝ζ<br />
⋅ε<br />
0 ⎠ ⎝ζ<br />
⋅ε<br />
0 ⎠<br />
2<br />
⎤<br />
⎥<br />
⎥⎦<br />
Ramo <strong>di</strong>scendente: ( ε > ζ ⋅ )<br />
d<br />
ε 0<br />
2<br />
⎡ ⎛ ε ⎤<br />
d ⎞<br />
⎢ ⎜ −1⎟<br />
⎥<br />
⎢ ⎜ ζε<br />
0<br />
σ<br />
⎟ ⎥<br />
d<br />
= ζ ⋅ f '<br />
c<br />
1 −<br />
⎢ ⎜ ⎟<br />
(3.31)<br />
2 ⎥<br />
⎢ ⎜ −1<br />
⎟ ⎥<br />
⎢⎣<br />
⎝ ζ ⎠ ⎥⎦<br />
57
Legami costitutivi e problema non lineare Cap. 3<br />
Il parametro <strong>di</strong> softened ha lo scopo <strong>di</strong> ridurre la legge costitutiva a compressione del calcestruzzo,<br />
per tener conto della <strong>di</strong>fferenza <strong>di</strong> comportamento tra un calcestruzzo appartenente ad una struttura<br />
reale ed un calcestruzzo appartenente ad un provino sottoposto a compressione.<br />
Figura 3.11: Legame uniassiale del calcestruzzo compresso.<br />
L’effetto <strong>di</strong> una tensione trasversale <strong>di</strong> trazione mo<strong>di</strong>fica la legge a compressione riducendone sia il<br />
valore <strong>di</strong> sforzo massimo sia la relativa deformazione. Per definire il parametro <strong>di</strong> softened<br />
ζ =<br />
1<br />
1+<br />
400<br />
⋅ε eq<br />
si definisce una deformazione <strong>di</strong> trazione trasversale equivalente, se la <strong>di</strong>rezione<br />
delle compressioni è la 1, si assume<br />
2<br />
3<br />
2<br />
ε<br />
eq<br />
= ε 2<br />
+ ε dove ε<br />
2<br />
vale 0 se la deformazione è <strong>di</strong><br />
compressione, ε<br />
2<br />
se è <strong>di</strong> trazione.<br />
Per il calcestruzzo in trazione si utilizza il seguente legame:<br />
Ramo ascendente: ( ε ≤ ε ) σ<br />
r<br />
= Ec<br />
⋅ε<br />
r<br />
= 3 .875 f '<br />
c<br />
⋅ε<br />
r<br />
(3.32)<br />
r<br />
cr<br />
Ramo <strong>di</strong>scendente: ε > ε<br />
r<br />
cr<br />
0.4<br />
⎛ ε<br />
cr<br />
⎞<br />
0 ⎛ 0.00008<br />
.31 '<br />
⎟ ⎞<br />
σ ⎜<br />
⎟ = ⋅<br />
⎜<br />
r<br />
= f<br />
cr<br />
f<br />
c<br />
(3.33)<br />
⎝ ε<br />
r ⎠<br />
⎝ ε<br />
r ⎠<br />
0.4<br />
58
Legami costitutivi e problema non lineare Cap. 3<br />
Figura 3.12: Legame uniassiale del calcestruzzo in trazione.<br />
In tutte le formule precedenti si è assunto<br />
E<br />
c<br />
= 3875 f ' [MPa] (Modulo elastico del calcestruzzo),<br />
ε = 0.00008 (Deformazione <strong>di</strong> fessurazione), = 0.31 f ' c [MPa] (Tensione <strong>di</strong> fessurazione).<br />
cr<br />
Il generico modulo G, viene formato come:<br />
f cr<br />
c<br />
G<br />
ij<br />
Ei<br />
⋅E<br />
j<br />
= (3.34)<br />
E + E<br />
i<br />
j<br />
● Formata la matrice D nel sistema <strong>di</strong> riferimento principale, si ricavano le proprietà del materiale<br />
nel sistema globale tramite la relazione<br />
D<br />
XYZ<br />
= T<br />
T<br />
⋅D<br />
123<br />
⋅T<br />
dove [L3], [VMW]:<br />
2<br />
2<br />
2<br />
⎡ l<br />
⎤<br />
1<br />
m1<br />
n1<br />
l1<br />
⋅m1<br />
m1<br />
⋅n1<br />
l1⋅n1<br />
⎢ 2<br />
2<br />
2<br />
⎥<br />
⎢ l2<br />
m2<br />
n2<br />
l2<br />
⋅m2<br />
m2<br />
⋅n2<br />
l2<br />
⋅n2<br />
⎥<br />
⎢<br />
2<br />
2<br />
2<br />
l<br />
⎥<br />
3<br />
m3<br />
n3<br />
l3<br />
⋅m3<br />
m3<br />
⋅n3<br />
l3<br />
⋅n3<br />
T = ⎢<br />
⎥<br />
(3.35)<br />
⎢2⋅l1<br />
⋅l2<br />
2⋅m1<br />
⋅m2<br />
2⋅n1<br />
⋅n2<br />
l1<br />
⋅m2<br />
+ l2<br />
⋅m1<br />
m1<br />
⋅n2<br />
+ m2<br />
⋅n1<br />
n1<br />
⋅l2<br />
+ n2<br />
⋅l1<br />
⎥<br />
⎢2⋅l<br />
⋅ ⋅ ⋅ ⋅ ⋅ ⋅ + ⋅ ⋅ + ⋅ ⋅ + ⋅ ⎥<br />
2<br />
l3<br />
2 m2<br />
m3<br />
2 n2<br />
n3<br />
l2<br />
m3<br />
l3<br />
m2<br />
m2<br />
n3<br />
m3<br />
n2<br />
n2<br />
l3<br />
n3<br />
l2<br />
⎢<br />
⎥<br />
⎢⎣<br />
2⋅l3<br />
⋅l1<br />
2⋅m3<br />
⋅m1<br />
2⋅n3<br />
⋅n1<br />
l3<br />
⋅m1<br />
+ l1⋅m3<br />
m3<br />
⋅n1<br />
+ m1<br />
⋅n3<br />
n3<br />
⋅l1<br />
+ n1<br />
⋅l3<br />
⎥⎦<br />
avendo in<strong>di</strong>cato con l m n i coseni <strong>di</strong>rettori della terna principale rispetto al sistema X Y Z.<br />
i<br />
i<br />
i<br />
59
Legami costitutivi e problema non lineare Cap. 3<br />
● Calcolate le proprietà del materiale nel sistema <strong>di</strong> riferimento principale, la matrice <strong>di</strong> rigidezza<br />
dell’elemento finito viene calcolata in modo analogo al caso isotropo.<br />
10. Legami costitutivi dell’acciaio<br />
Per l’acciaio normale il legame più semplice è quello bilatero simmetrico, <strong>di</strong> tipo elastico<br />
perfettamente plastico. Si assume quin<strong>di</strong>:<br />
σ<br />
E ε<br />
s<br />
=<br />
s<br />
⋅<br />
s<br />
per<br />
s y<br />
ε < ε ramo elastico lineare (3.36)<br />
σ<br />
s<br />
= f y<br />
per ε<br />
s<br />
≥ ε<br />
y<br />
ramo plastico (3.37)<br />
dove<br />
E<br />
s<br />
: Modulo elastico delle armature, f<br />
y<br />
: Valore dello sforzo <strong>di</strong> snervamento dell’ armatura.<br />
Questo modello rappresenta bene la risposta <strong>di</strong> un provino <strong>di</strong> acciaio in una prova <strong>di</strong> trazione, il<br />
comportamento delle barre d’armatura immerse (embedded) nel calcestruzzo è però <strong>di</strong>verso. La<br />
<strong>di</strong>fferenza più importante è l’abbassamento della tensione<br />
f<br />
y<br />
; inoltre, dopo lo snervamento, il<br />
comportamento della barra immersa nel calcestruzzo è <strong>di</strong> <strong>di</strong>fficile determinazione in quanto la<br />
deformazione dell’acciaio nella zona <strong>di</strong> fessura cresce rapidamente. Un legame costitutivo più vicino<br />
al reale comportamento dell’acciaio immerso nel calcestruzzo prevede le seguenti equazioni<br />
costitutive [L22], [Vec]:<br />
f<br />
= ⋅ε<br />
Ramo elastico, fig. 3.13 ( ε<br />
s<br />
≤ ε<br />
n<br />
) (3.33)<br />
s<br />
E s<br />
f = f<br />
s<br />
y<br />
s<br />
⎡<br />
ε ⎤<br />
s<br />
⎢( 0 .91−2B) + ( 0.02+<br />
0.25B)<br />
. ⎥ Ramo <strong>di</strong> incru<strong>di</strong>mento, fig. 3.13 ( ε<br />
s<br />
> ε<br />
n<br />
) (3.34)<br />
⎢⎣<br />
ε<br />
y ⎥⎦<br />
Essendo ε<br />
n<br />
la deformazione me<strong>di</strong>a <strong>di</strong> snervamento delle barre d’acciaio avvolte dal calcestruzzo<br />
misurata all’inizio dello snervamento effettivo e pari a =ε ( 0.93−<br />
B)<br />
ε .<br />
n y<br />
2<br />
60
Legami costitutivi e problema non lineare Cap. 3<br />
Il parametro<br />
⎛ 1 ⎞⎛<br />
B=<br />
⎜ ⎟⎜<br />
⎝ ρ ⎠<br />
⎝<br />
f<br />
f<br />
cr<br />
y<br />
⎞<br />
⎟<br />
⎠<br />
1.5<br />
è il termine associato allo snervamento apparente delle barre.<br />
Figura 3.13: Legame uniassiale per l'acciaio immerso nel calcestruzzo.<br />
Per l’acciaio <strong>di</strong> precompressione il modello assunto è quello <strong>di</strong> Ramberg-Osgood [MC90]:<br />
f<br />
p<br />
= E ( E + ε ) Ramo elastico, fig. 3.14 ( f 0. 7 f )<br />
ps<br />
dec<br />
s<br />
p<br />
≤ (3.35)<br />
pu<br />
'<br />
E<br />
ps<br />
( ε<br />
dec<br />
+ ε<br />
s<br />
)<br />
'<br />
( E ( ε + ))/<br />
f<br />
= Ramo <strong>di</strong> incru<strong>di</strong>mento, fig. 3.14 ( f<br />
[ { } ] m 1<br />
1 +<br />
m<br />
p<br />
0. 7 f<br />
pu<br />
)<br />
ps dec<br />
ε<br />
s pu<br />
f<br />
p<br />
/<br />
> (3.36)<br />
Figura 3.14: Legame uniassiale per l'acciaio da precompressione.<br />
61
Legami costitutivi e problema non lineare Cap. 3<br />
10. Cenni sulla regolarizzazione della risposta non lineare<br />
L’implementazione <strong>di</strong> un co<strong>di</strong>ce <strong>di</strong> calcolo che stu<strong>di</strong> il ramo <strong>di</strong> “softening” <strong>di</strong> un materiale presenta<br />
numerose <strong>di</strong>fficoltà. Una <strong>di</strong> queste è la localizzazione del danneggiamento in zone <strong>di</strong> volume tendenti<br />
a zero, quando il <strong>di</strong>agramma sforzi deformazioni manifesta pendenza negativa. Questo<br />
comporterebbe l’annullarsi dell’energia <strong>di</strong>ssipata dalla struttura, fenomeno fisicamente non realistico.<br />
Per ovviare questo inconveniente si sono stu<strong>di</strong>ati dei meto<strong>di</strong> <strong>di</strong> regolarizzazione, che tramite<br />
l’introduzione <strong>di</strong> una lunghezza caratteristica <strong>di</strong>pendente dal materiale, governano l’ampiezza della<br />
zona nella quale si concentrano i fenomeni anelastici [Per],[BoM2]. La regolarizzazione del modello<br />
a danno può avvenire con uno dei seguenti meto<strong>di</strong> [Mai]:<br />
● Regolarizzazione basata sull’energia <strong>di</strong> frattura.<br />
I parametri che governano il softening del materiale vengono mo<strong>di</strong>ficati al variare della mesh, in<br />
modo che l’energia <strong>di</strong> frattura associata all’elemento finito rimanga costante.<br />
● Modello <strong>di</strong> danno non locale.<br />
Si considera che l’evoluzione del danno in un punto sia governato dalla me<strong>di</strong>a pesata su <strong>di</strong> un volume<br />
rappresentativo <strong>di</strong> materiale, anziché solo dal suo valore puntuale.<br />
● Modello <strong>di</strong> danno con gra<strong>di</strong>ente <strong>di</strong> or<strong>di</strong>ne superiore.<br />
Si assume che il comportamento del materiale in un punto <strong>di</strong>penda non solo dal valore del danno in<br />
quel punto, ma anche dal suo gra<strong>di</strong>ente.<br />
● Regolarizzazione viscosa.<br />
Si introduce nel modello una <strong>di</strong>pendenza dal tempo me<strong>di</strong>ante un parametro <strong>di</strong> viscosità fittizia.<br />
Il modello a danno isotropo <strong>di</strong> Cervera, utilizza una regolarizzazione basata sull’energia <strong>di</strong> frattura,<br />
<strong>di</strong>fatti il parametro<br />
G<br />
f<br />
⋅ E 1 −1<br />
A = ( − ) viene ricavato in modo che i vari elementi della mesh<br />
2<br />
L ⋅ ( f ) 2<br />
t<br />
abbiano la stessa energia <strong>di</strong> frattura. Nella formula per ricavare A, il parametro L (lunghezza<br />
caratteristica dell’elemento finito) caratterizza la <strong>di</strong>mensione dei singoli elementi.<br />
62
Legami costitutivi e problema non lineare Cap. 3<br />
Il modello ortotropo viene invece regolarizzato utilizzando un danno non locale [BoM2]. Definita<br />
una grandezza caratteristica per la struttura λ (che può essere l’altezza della trave in caso <strong>di</strong> travi<br />
inflesse) in ogni punto <strong>di</strong> Gauss viene calcolata una deformazione non locale pari a:<br />
~ ε = c⋅ε<br />
+ (1−<br />
c)<br />
⋅<br />
∑<br />
i<br />
ε(<br />
ξ ) ⋅w(<br />
ξ )<br />
∑<br />
i<br />
w(<br />
ξ )<br />
dove la sommatoria sull’in<strong>di</strong>ce i è riferita a tutti i valori <strong>di</strong> deformazione appartenenti ad una sfera<br />
centrata nel punto corrente <strong>di</strong> raggio pari a<br />
2 ⋅λ<br />
, ξ è la <strong>di</strong>stanza dal punto corrente al generico punto<br />
interno alla sfera e w è il peso da assegnare alle varie deformazioni. La funzione peso w è stata<br />
assunta pari a<br />
2<br />
−(<br />
ξ / λ )<br />
w(<br />
ξ ) =e mentre alla costante c è stato assegnato un valore <strong>di</strong> 0.9.<br />
11. Metodo della secante per la soluzione <strong>di</strong> problemi non lineari<br />
Se il materiale è non lineare elastico, l’equazione costitutiva non <strong>di</strong>pende dalla storia <strong>di</strong> carico.<br />
L’equazione <strong>di</strong> equilibrio per il singolo elemento è:<br />
K ⋅ S = R<br />
(3.37)<br />
e<br />
e<br />
dove<br />
K è la matrice <strong>di</strong> rigidezza secante:<br />
e<br />
K<br />
e<br />
= ∫ B ⋅ D ⋅ B ⋅ dV<br />
(3.38)<br />
V<br />
T<br />
la matrice costitutiva D conterrà i moduli secanti del materiale. Assemblando le (3.38) si trova un<br />
sistema <strong>di</strong> equazioni algebriche non lineari, la cui soluzione si ottiene col metodo iterativo della<br />
secante.<br />
63
Legami costitutivi e problema non lineare Cap. 3<br />
Alla i-esima iterazione si ha:<br />
( i− 1) ( i)<br />
K ⋅ S = R<br />
t<br />
t<br />
(3.39)<br />
dove la matrice <strong>di</strong> rigidezza secante è calcolata alla iterazione precedente come:<br />
K<br />
( i− 1) T ( i−1)<br />
e<br />
= ∫ B<br />
V<br />
⋅ D<br />
⋅ B ⋅ dV<br />
(3.40)<br />
La soluzione viene eseguita in modo automatico con le seguenti operazioni. Supponiamo <strong>di</strong> applicare<br />
il carico R totale (lo schema seguente è valido nel caso <strong>di</strong> un modello a danno isotropo, la<br />
generalizzazione ad legame anisotropo è imme<strong>di</strong>ata).<br />
Iterazione i = 1<br />
Calcolo della matrice <strong>di</strong> rigidezza col modulo iniziale, per tutti gli elementi.<br />
K<br />
(0)<br />
e<br />
= ∫ B<br />
V<br />
T<br />
⋅ D<br />
(0)<br />
⋅ B ⋅ dV<br />
Assemblaggio e risoluzione del sistema lineare.<br />
(0)<br />
K ⋅ S = R<br />
t<br />
(1)<br />
t<br />
Calcolo della deformazione degli elementi.<br />
ε<br />
(1)<br />
= B ⋅ S<br />
(1)<br />
Valutazione del danneggiamento per ogni elemento, calcolo della tensione <strong>di</strong> Cauchy e della nuova<br />
matrice costitutiva.<br />
64
Legami costitutivi e problema non lineare Cap. 3<br />
σ<br />
(1)<br />
(0)<br />
= D ⋅ d<br />
(1) (1)<br />
( 1−<br />
) ⋅ε<br />
D<br />
(1)<br />
= D<br />
(0)<br />
⋅ (1 − d<br />
(1)<br />
)<br />
Calcolo delle forze interne equivalenti alle tensioni <strong>di</strong> Cauchy per ogni elemento.<br />
F<br />
(1)<br />
e<br />
= ∫ B<br />
V<br />
T<br />
⋅σ<br />
(1)<br />
⋅ dV<br />
Assemblaggio delle forze interne e calcolo dello squilibrio.<br />
P<br />
(1)<br />
(1)<br />
t<br />
= R − F t<br />
F<br />
Squilibrio alla seconda iterazione<br />
R<br />
1 2 i<br />
Punto <strong>di</strong> equilibrio teorico<br />
Punto <strong>di</strong> equilibrio numerico<br />
S(1) S(2) S(i)<br />
S<br />
Figura 3.15: Metodo della matrice secante.<br />
Iterazione i = 2<br />
Calcolo della matrice <strong>di</strong> rigidezza col modulo iniziale, per tutti gli elementi.<br />
K<br />
(1)<br />
e<br />
= ∫ B<br />
V<br />
T<br />
⋅ D<br />
(1)<br />
⋅ B ⋅ dV<br />
Assemblaggio e risoluzione del sistema lineare.<br />
65
Legami costitutivi e problema non lineare Cap. 3<br />
(1)<br />
K ⋅ S = R<br />
t<br />
(2)<br />
t<br />
Calcolo della deformazione degli elementi.<br />
ε<br />
(2)<br />
= B ⋅ S<br />
(2)<br />
Valutazione del danneggiamento per ogni elemento, calcolo della tensione <strong>di</strong> Cauchy e della nuova<br />
matrice costitutiva.<br />
σ<br />
(2)<br />
(0)<br />
= D ⋅ d<br />
(2) (2)<br />
( 1−<br />
) ⋅ε<br />
D<br />
(2)<br />
= D<br />
(0)<br />
⋅ (1 − d<br />
(2)<br />
)<br />
Calcolo delle forze interne equivalenti alle tensioni <strong>di</strong> Cauchy per ogni elemento.<br />
F<br />
(2)<br />
e<br />
= ∫ B<br />
V<br />
T<br />
⋅σ<br />
(2)<br />
⋅ dV<br />
Assemblaggio delle forze interne e calcolo dello squilibrio.<br />
P<br />
(2)<br />
(2)<br />
t<br />
= R − F t<br />
Il proce<strong>di</strong>mento iterativo prosegue finché non viene sod<strong>di</strong>sfatto un opportuno criterio <strong>di</strong> convergenza<br />
[L2, L6, L18, L19]. Un primo criterio è quello <strong>di</strong> determinare la norma dell’incremento <strong>di</strong><br />
spostamento e rapportarla alla norma dello spostamento corrente; si raggiunge convergenza quando<br />
tale rapporto è minore <strong>di</strong> una quantità prefissata:<br />
S<br />
( i)<br />
− S<br />
S<br />
( i)<br />
( i−1)<br />
≤ δ<br />
1<br />
(3.41)<br />
66
Legami costitutivi e problema non lineare Cap. 3<br />
Un altro criterio si basa sulla norma delle forze residue rapportata alla norma dei carichi esterni:<br />
R − F<br />
R<br />
( i)<br />
≤ δ<br />
2<br />
(3.42)<br />
Un terzo criterio può essere quello <strong>di</strong> rapportare la norma sul lavoro fatto rispetto al lavoro iniziale:<br />
( R − F<br />
( i)<br />
T<br />
)<br />
( R − F<br />
⋅ ( S<br />
(1)<br />
)<br />
( i)<br />
T<br />
− S<br />
⋅ S<br />
(1)<br />
( i−1)<br />
)<br />
≤ δ<br />
3<br />
(3.43)<br />
Come norma viene generalmente usata la norma euclidea.<br />
Il proce<strong>di</strong>mento viene invece arrestato nel caso <strong>di</strong> mancata convergenza della soluzione nel numero<br />
massimo <strong>di</strong> iterazioni previste. Questa situazione è in genere associata ad una con<strong>di</strong>zione <strong>di</strong> carico<br />
che supera la capacita portante della struttura. La tecnica risolutiva secante presenta dei vantaggi e<br />
degli svantaggi. La matrice <strong>di</strong> rigidezza secante è definita positiva per cui il proce<strong>di</strong>mento iterativo<br />
risulta molto più affidabile rispetto ad altri algoritmi. La velocità <strong>di</strong> convergenza del metodo secante è<br />
però più bassa essendo un metodo del primo or<strong>di</strong>ne. La limitazione fondamentale dell’impostazione<br />
secante risiede però nell’ipotizzare un legame costitutivo dei materiali elastico non lineare per cui<br />
non è possibile cogliere i fenomeni isteretici.<br />
Altri algoritmi numerici utilizzati nella risoluzione <strong>di</strong> problemi non lineari sono il metodo <strong>di</strong> Newton<br />
ed i meto<strong>di</strong> <strong>di</strong> Newton mo<strong>di</strong>ficati. Questi meto<strong>di</strong> sono <strong>di</strong> tipo incrementale, e sono più adatti, rispetto<br />
al metodo secante, a seguire una storia <strong>di</strong> carico complicata.<br />
Il metodo <strong>di</strong> Newton, o metodo della matrice tangente, in particolare converge con velocità <strong>di</strong><br />
convergenza 2 se la soluzione <strong>di</strong> partenza nella generica iterazione, è sufficientemente vicina alla<br />
soluzione esatta.<br />
67
Applicazioni in campo elastico lineare Cap. 4<br />
CAP. 4<br />
Applicazioni in campo elastico lineare<br />
In<strong>di</strong>ce riassuntivo delle applicazioni riportate<br />
Esempi eseguiti con tutti i 3 co<strong>di</strong>ci <strong>di</strong> calcolo implementati (integrazione completa, integrazione<br />
selettiva, funzioni <strong>di</strong> forma non compatibili) :<br />
- Patch Test per l’elemento solido integrato in modo selettivo.<br />
- Patch Test per l’elemento solido aventi funzioni <strong>di</strong> forma non compatibili.<br />
- Analisi una mensola snella e soggetta ad un carico concentrato.<br />
- Analisi <strong>di</strong> una trave doppiamente incastrata e soggetta ad un carico uniforme.<br />
Esempi eseguiti col solo co<strong>di</strong>ce <strong>di</strong> calcolo operante con funzioni non compatibili:<br />
- Stu<strong>di</strong>o della deformabilità trasversale e dell’ingobbimento sezionale <strong>di</strong> un elemento in<br />
parete sottile a profilo rettangolare chiuso.<br />
Esempi eseguiti col solo co<strong>di</strong>ce <strong>di</strong> calcolo operante ad integrazione selettiva:<br />
- Patch Test per l’elemento solido con acciaio <strong>di</strong>ffuso.<br />
- Patch Test per l’elemento solido con acciaio embedded.<br />
- Patch Test per l’elemento solido presollecitato.<br />
- Pilastro soggetto a peso proprio.<br />
- Stu<strong>di</strong>o <strong>di</strong> una pila da ponte a profilo misto in campo elastico lineare.<br />
68
Applicazioni in campo elastico lineare Cap. 4<br />
1. Patch Test per l’elemento solido integrato in modo selettivo<br />
Il Patch Test è stato introdotto dal Prof. Irons come mezzo per verificare la convergenza <strong>di</strong> un<br />
elemento finito non compatibile. In questo lavoro viene eseguito sia per testare il co<strong>di</strong>ce <strong>di</strong> calcolo<br />
implementato, sia per verificare la correttezza della soluzione ottenuta tramite l’integrazione selettiva<br />
(e quin<strong>di</strong> con presenza <strong>di</strong> mo<strong>di</strong> deformativi ad energia nulla). Tutte le prove numeriche sono state<br />
eseguite sia con un modulo <strong>di</strong> Poisson nullo, sia pari a 0.2.<br />
Il Patch Test <strong>di</strong> esegue nel seguente modo.<br />
1) Si forma una maglia <strong>di</strong> elementi contenenti almeno un nodo interno. Le maglie devono<br />
essere non regolari in modo da prevenire eventuali compensazioni <strong>di</strong> errore per simmetria. La maglia<br />
scelta in questo lavoro, riproduce un cubo <strong>di</strong> lato 2 sud<strong>di</strong>viso in 8 cubi <strong>di</strong> lato 1. Se la maglia non<br />
fosse <strong>di</strong>storta il nodo centrale avrebbe avuto coor<strong>di</strong>nate pari a 0,0,0; è stato invece imposto che il<br />
punto centrale avesse coor<strong>di</strong>nate 0.2,0.1,0.3 in modo da ottenere un cubo regolare dall’assemblaggio<br />
<strong>di</strong> 8 elementi <strong>di</strong>storti.<br />
z<br />
y<br />
x<br />
Figura 5.1: Rappresentazione della struttura utilizzata nel Patch Test.<br />
2) Si assumono arbitrariamente che dei polinomi P i (x,y,z) siano la soluzione del problema<br />
negli spostamenti u (in X), v (in Y) e w (in Z).<br />
69
Applicazioni in campo elastico lineare Cap. 4<br />
3) Si calcolano i valori <strong>di</strong> P i , k nei no<strong>di</strong> esterni della mesh, e si effettua una prova numerica<br />
imponendo i valori P i,k e controllando che gli spostamenti calcolati nel nodo centrale coincidano coi<br />
valori ottenibili dai polinomi imposti.<br />
a) Prova <strong>di</strong> trazione uniassiale<br />
Si impone uno spostamento in <strong>di</strong>rezione X pari a 1.0 per i no<strong>di</strong> con coor<strong>di</strong>nata x = 1.0, 0.5 per i no<strong>di</strong><br />
con coor<strong>di</strong>nata x = 0.0 e 0.0 per i no<strong>di</strong> <strong>di</strong> coor<strong>di</strong>nata –1.0. Tutti gli altri spostamenti dei no<strong>di</strong> esterni<br />
vengono imposti nulli. Alla struttura rimangono così solamente i 3 gra<strong>di</strong> <strong>di</strong> libertà relativi al nodo<br />
interno.<br />
La soluzione imposta prevede i seguenti spostamenti:<br />
u ( x , y,<br />
z)<br />
= 0.5 ⋅(1.0<br />
+ x)<br />
In <strong>di</strong>rezione X<br />
v ( x,<br />
y,<br />
z)<br />
= 0.0<br />
In <strong>di</strong>rezione Y<br />
w ( x,<br />
y,<br />
z)<br />
= 0.0<br />
In <strong>di</strong>rezione Z<br />
Per il nodo centrale si deve ottenere uno spostamento pari a u = 0 .5 ⋅(0.2+<br />
1) = 0. 6<br />
Il risultato numerico ottenuto è<br />
u = 6.000000000000002E-001<br />
v = 1.242266312400961E-017<br />
z = -8.848897666825595E-018<br />
Mentre in termini <strong>di</strong> tensioni in tutti gli elementi risulta:<br />
PT G SIGMA X SIGMA Y SIGMA Z TAU XY TAU YZ TAU XZ<br />
1 .2000E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
2 .2000E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
3 .2000E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
4 .2000E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
5 .2000E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
6 .2000E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
7 .2000E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
8 .2000E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
9 .2000E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
70
Applicazioni in campo elastico lineare Cap. 4<br />
Stesse tensioni negli altri elementi. Dato che si è assunto un modulo <strong>di</strong> elasticità pari a 40.0 ed un<br />
∆ 1.0<br />
modulo <strong>di</strong> Poisson pari a 0.0, σ = E ⋅ ε = E ⋅ = 40 .0 ⋅ = 20. 0 il risultato appare corretto.<br />
Lato 2.0<br />
Questa stessa prova numerica è stata eseguita anche per un nodo interno <strong>di</strong> coor<strong>di</strong>nate x = 0.1, y =<br />
0.2, z = 0.3 e per x = 0.0, y = 0.0, z =0.0, poiché non è detto che se la soluzione calcolata è corretta<br />
per una posizione del nodo centrale, lo sia anche per altre posizioni. In tutte le prove eseguite i<br />
risultati sono stati comunque corretti.<br />
La prova è stata quin<strong>di</strong> ripetuta utilizzando un modulo <strong>di</strong> Poisson pari a 0.2. La soluzioni in termini <strong>di</strong><br />
spostamento non deve essere influenzata dal valore del modulo <strong>di</strong> Poisson, per cui ci si attende uno<br />
spostamento del nodo centrale pari a 0.6 in <strong>di</strong>rezione X.<br />
Essendo impe<strong>di</strong>ta la contrazione laterale, nasceranno però delle tensioni anche in <strong>di</strong>rezione Y e Z, e la<br />
tensione in X risulterà maggiore rispetto al caso stu<strong>di</strong>ato in precedenza. Chiamando ∆ il generico<br />
ce<strong>di</strong>mento imposto sulla faccia del cubo e b il lato del cubo, è possibile, utilizzando il metodo delle<br />
forze, scrivere il seguente sistema:<br />
⎡ b<br />
⎢ E<br />
⎢<br />
⎢ ν ⋅ b<br />
⎢−<br />
⎢<br />
E<br />
⎢ ν ⋅ b<br />
⎢−<br />
⎣ E<br />
ν ⋅ b<br />
−<br />
E<br />
b<br />
E<br />
ν ⋅ b<br />
−<br />
E<br />
ν ⋅ b⎤<br />
− ⎥ ⎡σ<br />
x ⎤ ⎡∆<br />
E<br />
⎥ ⎢ ⎥ ⎢<br />
ν ⋅ b⎥<br />
⎢ ⎥ ⎢<br />
− ⎥ ⋅ ⎢σ<br />
⎥ = ⎢<br />
y<br />
∆<br />
E<br />
⎥ ⎢ ⎥ ⎢<br />
⎥ ⎢ ⎥ ⎢<br />
b<br />
⎥ ⎢<br />
⎣σ<br />
⎥<br />
⎦<br />
⎢<br />
z ⎣∆<br />
E ⎦<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
x<br />
y<br />
z<br />
(5.1)<br />
risolvendo il (5.1) è possibile ricavare la soluzione corretta in termini <strong>di</strong> tensioni, dati i ce<strong>di</strong>menti<br />
imposti sulle facce. Nel caso in esame si ottieneσ<br />
22 .2 σ = 5.5 σ = 5. 5<br />
L’elaborazione numerica fornisce in termini <strong>di</strong> spostamento:<br />
x<br />
=<br />
y<br />
z<br />
u = 6.000000000000000E-001<br />
v = 3.337805100953997E-017<br />
w = -3.929851842769097E-017<br />
71
Applicazioni in campo elastico lineare Cap. 4<br />
Mentre in termini <strong>di</strong> tensioni in tutti gli elementi risulta:<br />
PT G SIGMA X SIGMA Y SIGMA Z TAU XY TAU YZ TAU XZ<br />
1 .2222E+02 .5556E+01 .5556E+01 .0000E+00 .0000E+00 .0000E+00<br />
2 .2222E+02 .5556E+01 .5556E+01 .0000E+00 .0000E+00 .0000E+00<br />
3 .2222E+02 .5556E+01 .5556E+01 .0000E+00 .0000E+00 .0000E+00<br />
***<br />
7 .2222E+02 .5556E+01 .5556E+01 .0000E+00 .0000E+00 .0000E+00<br />
8 .2222E+02 .5556E+01 .5556E+01 .0000E+00 .0000E+00 .0000E+00<br />
9 .2222E+02 .5556E+01 .5556E+01 .0000E+00 .0000E+00 .0000E+00<br />
Questa setessa prova numerica è stata eseguita anche per un nodo interno <strong>di</strong> coor<strong>di</strong>nate x = 0.1, y =<br />
0.2, z = 0.0 e per x = 0.0, y = 0.0, z =0.0, in tutte le prove eseguite i risultati sono corretti.<br />
b) Prova <strong>di</strong> taglio puro<br />
Si impone uno spostamento in <strong>di</strong>rezione Y pari ad 1.0 a tutti i no<strong>di</strong> con Z = 1.0 e uno spostamento<br />
pari a 0.5 nei no<strong>di</strong> con Z = 0.5. Ovvero si impone uno spostamento che sod<strong>di</strong>sfi i polinomi:<br />
u ( x,<br />
y,<br />
z)<br />
= 0.0<br />
In <strong>di</strong>rezione X<br />
v ( x , y,<br />
z)<br />
= 0.5 ⋅(1.0<br />
+ z)<br />
In <strong>di</strong>rezione Y<br />
w ( x,<br />
y,<br />
z)<br />
= 0.0<br />
In <strong>di</strong>rezione Z<br />
Lo spostamento del nodo centrale deve perciò risultare v = 0 .5 ⋅(1.0<br />
+ 0.2) = 0. 6 sia con modulo <strong>di</strong><br />
Poisson nullo che con modulo <strong>di</strong> Poisson pari a 0.2.<br />
Le uniche tensioni non nulle saranno le τ yz che dovranno valere:<br />
per ν = 0.0 γ = 0.5 τ = 10.0<br />
per ν = 0.2 γ = 0.5 τ = 8 . 3<br />
72
Applicazioni in campo elastico lineare Cap. 4<br />
Per ν = 0.0 l’elaborazione numerica fornisce in termini <strong>di</strong> spostamento:<br />
u = 6.987782965174495E-018<br />
v = 6.000000000000001E-001<br />
w = 4.119739619340261E-017<br />
Mentre in termini <strong>di</strong> tensioni, in tutti gli elementi risulta:<br />
PT G SIGMA X SIGMA Y SIGMA Z TAU XY TAU YZ TAU XZ<br />
1 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .1000E+02 .0000E+00<br />
2 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .1000E+02 .0000E+00<br />
3 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .1000E+02 .0000E+00<br />
* * *<br />
8 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .1000E+02 .0000E+00<br />
9 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .1000E+02 .0000E+00<br />
Per ν = 0.2 l’elaborazione numerica fornisce in termini <strong>di</strong> spostamento:<br />
u = -1.609447109364453E-017<br />
v = 6.000000000000002E-001<br />
w = 2.593942896853087E-017<br />
Mentre in termini <strong>di</strong> tensioni, in tutti gli elementi risulta:<br />
PT G SIGMA X SIGMA Y SIGMA Z TAU XY TAU YZ TAU XZ<br />
1 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .8333E+01 .0000E+00<br />
2 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .8333E+01 .0000E+00<br />
* * *<br />
7 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .8333E+01 .0000E+00<br />
8 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .8333E+01 .0000E+00<br />
9 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .8333E+01 .0000E+00<br />
Questa stessa prova numerica è stata eseguita anche per un nodo interno <strong>di</strong> coor<strong>di</strong>nate x = 0.1, y =<br />
0.2, z = 0.0 e per x = 0.0, y = 0.0, z =0.0, in tutte le prove eseguite i risultati sono corretti.<br />
73
Applicazioni in campo elastico lineare Cap. 4<br />
c) Prova <strong>di</strong> taglio – trazione<br />
Viene eseguita una prova <strong>di</strong> taglio più trazione nel solo caso con modulo <strong>di</strong> Poisson pari a 0.2. Il<br />
taglio viene imposto come nel caso b) mentre la trazione come nel caso a) con un valore pari a 0.6<br />
nella faccia esterna del cubo. I risultati esatti si deducono sovrapponendo gli effetti del caso b) con<br />
0.6 volte gli effetti del caso a). Gli spostamenti imposti sod<strong>di</strong>sfano i polinomi:<br />
u ( x,<br />
y,<br />
z)<br />
= 0.3⋅<br />
(1.0 + x)<br />
In <strong>di</strong>rezione X<br />
v ( x,<br />
y,<br />
z)<br />
= 0.5⋅<br />
(1.0 + z)<br />
In <strong>di</strong>rezione Y<br />
w ( x,<br />
y,<br />
z)<br />
= 0.0<br />
In <strong>di</strong>rezione Z<br />
Nel nodo centrale dovrà risultare u = 0 .3 ⋅(0.2+<br />
1) = 0. 36 e v = 0 .5 ⋅(1.0<br />
+ 0.2) = 0. 6 mentre le tensioni<br />
dovranno essere costanti e pari a :<br />
σ<br />
x<br />
=<br />
y<br />
z<br />
yz<br />
22 .2 ⋅ 0.6 = 13.3 σ = 5.5 ⋅ 0.6 = 3.3 σ = 5.5 ⋅ 0.6 = 3.3 τ = 8.3<br />
L’elaborazione numerica fornisce in termini <strong>di</strong> spostamento:<br />
u = 3.600000000000000E-001<br />
v = 6.000000000000000E-001<br />
w = 4.290914885448565E-017<br />
Mentre in termini <strong>di</strong> tensioni, in tutti gli elementi risulta:<br />
PT G SIGMA X SIGMA Y SIGMA Z TAU XY TAU YZ TAU XZ<br />
1 .1333E+02 .3333E+01 .3333E+01 .0000E+00 .8333E+01 .0000E+00<br />
2 .1333E+02 .3333E+01 .3333E+01 .0000E+00 .8333E+01 .0000E+00<br />
3 .1333E+02 .3333E+01 .3333E+01 .0000E+00 .8333E+01 .0000E+00<br />
4 .1333E+02 .3333E+01 .3333E+01 .0000E+00 .8333E+01 .0000E+00<br />
5 .1333E+02 .3333E+01 .3333E+01 .0000E+00 .8333E+01 .0000E+00<br />
6 .1333E+02 .3333E+01 .3333E+01 .0000E+00 .8333E+01 .0000E+00<br />
7 .1333E+02 .3333E+01 .3333E+01 .0000E+00 .8333E+01 .0000E+00<br />
8 .1333E+02 .3333E+01 .3333E+01 .0000E+00 .8333E+01 .0000E+00<br />
9 .1333E+02 .3333E+01 .3333E+01 .0000E+00 .8333E+01 .0000E+00<br />
74
Applicazioni in campo elastico lineare Cap. 4<br />
2. Patch test per l’elemento solido aventi funzioni <strong>di</strong> forma non compatibili<br />
Il test sull’elemento non compatibile viene inizialmente eseguito su <strong>di</strong> una mesh non <strong>di</strong>storta (senza<br />
però piani <strong>di</strong> simmetria, punto centrale x = 0.2, y = 0.1, z = 0.3).<br />
z<br />
y<br />
x<br />
Figura 5.2: Mesh per il Patch Test dell'elemento incompatibile.<br />
Viene eseguita la prova <strong>di</strong> trazione vista nel punto a), si riportano i risultati in termini <strong>di</strong> spostamento:<br />
u = 5.000000000000000E-001<br />
v = 9.535333435268551E-034<br />
w = 4.633301234482236E-017<br />
Il test da risultati corretti. Il punto centrale viene ora portato a x = 0.35, y = 0.10, z = 0.30 <strong>di</strong><br />
conseguenza il cubo sarà formato da 8 esaedri irregolari. Essendo la trazione in <strong>di</strong>rezione X, lo<br />
1<br />
spostamento del punto centrale sarà 1 .35 ⋅ = 0. 675 .<br />
2<br />
75
Applicazioni in campo elastico lineare Cap. 4<br />
I risultati in termini <strong>di</strong> spostamento:<br />
u =6.760914893916842E-001<br />
v = 3.044309783847875E-017<br />
w = 2.938330877047082E-017<br />
Il test da risultati non corretti per lo spostamento in <strong>di</strong>rezione X. Il punto centrale viene ora portato a<br />
x = 0.35, y = 0.20, z = 0.30. Non avendo mo<strong>di</strong>ficato la coor<strong>di</strong>nata in <strong>di</strong>rezione X, ci si aspetta <strong>di</strong><br />
ritrovare gli stessi risultati, invece in termini <strong>di</strong> spostamento si trova:<br />
u = 6.760995594447284E-001<br />
v = 1.781093657018022E-003<br />
w = 2.598975706585580E-017<br />
Si noti che non solo compare uno spostamento in <strong>di</strong>rezione Y che non ha ragione <strong>di</strong> esistere, ma<br />
cambia anche lo spostamento in <strong>di</strong>rezione X senza che sia stata mo<strong>di</strong>ficata la coor<strong>di</strong>nata del punto<br />
centrale in quella <strong>di</strong>rezione. Il Patch Test da quin<strong>di</strong> dei risultati non corretti. Lo stesso problema<br />
risolto con l’esaedro a integrazione completa e con l’esaedro a integrazione selettiva fornisce:<br />
Integrazione completa:<br />
u = 6.750000000000002E-001<br />
v = 1.099285665512805E-018<br />
w = -8.917688029245993E-018<br />
Integrazione selettiva:<br />
u = 6.750000000000002E-001<br />
v = 1.176290574752829E-018<br />
w = 1.162143382850229E-017<br />
Come specificato in [Hughes] la formulazione dell’elemento incompatibile alla Wilson può dar luogo<br />
a dei risultati sbagliati in un Pacht Test con elementi <strong>di</strong>storti, come anche comprovato da numerosi<br />
stu<strong>di</strong> numerici e teorici [Lesaint]. Il problema è stato risolto da Taylor, grazie alla formulazione <strong>di</strong> un<br />
elemento incompatibile mo<strong>di</strong>ficato [Taylor]. In questo lavoro il co<strong>di</strong>ce <strong>di</strong> calcolo ad Elementi Finiti<br />
Incompatibili verrà utilizzato solo con mesh non <strong>di</strong>storte, per cui non viene introdotta la mo<strong>di</strong>fica<br />
apportata da Taylor.<br />
76
Applicazioni in campo elastico lineare Cap. 4<br />
3. Analisi <strong>di</strong> una mensola snella<br />
Per testare la qualità dei 3 meto<strong>di</strong> <strong>di</strong> soluzioni stu<strong>di</strong>ati (integrazione completa, integrazione selettiva e<br />
funzioni <strong>di</strong> forma non compatibili) si esegue l’analisi <strong>di</strong> una mensola snella. La sezione della mensola<br />
viene <strong>di</strong>scretizzata tramite 2 elementi finiti accoppiati nel senso della larghezza, in modo da avere 1<br />
solo elemento finito lungo l’altezza della mensola. L’uso <strong>di</strong> 2 elementi accoppiati è necessario per<br />
impe<strong>di</strong>re il propagarsi dei mo<strong>di</strong> spuri torsionali durante l’analisi con l’integrazione selettiva. La<br />
sezione della mensola ha lato 20 x 20 cm, mentre la sua lunghezza è pari a 4 m (rapporto L/h = 20). Il<br />
materiale ipotizzato possiede un modulo <strong>di</strong> Young E = 30000 MPa ed un modulo <strong>di</strong> Poisson pari a<br />
0.0 o 0.2 a seconda dei casi. La mensola è considerata incastrata ad un estremo e caricata nell’altro<br />
con una forza pari a 800 N. La soluzione <strong>di</strong> De Saint Venant in termini <strong>di</strong> freccia e rotazione<br />
dell’estremo caricato, fornisce:<br />
3<br />
3<br />
P ⋅ L 800 ⋅ 4000<br />
f = =<br />
= 4.26<br />
8<br />
3 ⋅ E ⋅ I 3 ⋅ 30000 ⋅1.3<br />
⋅10<br />
mm<br />
ϕ =<br />
P ⋅ L<br />
2<br />
2<br />
800 ⋅ 4000<br />
=<br />
2 ⋅ 30000 ⋅1.3<br />
⋅10<br />
8<br />
2 ⋅ E ⋅ I<br />
= 0.16<br />
L’analisi numerica è stata eseguita infittendo la <strong>di</strong>scretizzazione lungo l’asse della mensola da 1 a 64<br />
sud<strong>di</strong>visioni, ottenendo così le curve <strong>di</strong> convergenza per ognuno dei tre meto<strong>di</strong> <strong>di</strong> soluzione.<br />
77
Applicazioni in campo elastico lineare Cap. 4<br />
Spostamenti impe<strong>di</strong>ti<br />
Forze nodali applicate<br />
200<br />
100<br />
Figura 5.3: Modello utilizzato con 4 sud<strong>di</strong>visioni lungo l'asse.<br />
Dalle elaborazioni eseguite si nota che se il modulo <strong>di</strong> Poisson è nullo la soluzione calcolata con<br />
l’integrazione selettiva coincide (per il caso stu<strong>di</strong>ato) con la soluzione trovata impiegando le funzioni<br />
<strong>di</strong> forma incompatibili. La soluzione in termini <strong>di</strong> freccia è già ottimamente approssimata impiegando<br />
solamente 4 elementi lungo l’asse, mentre in termini <strong>di</strong> rotazione della sezione caricata la soluzione<br />
coincide con quella <strong>di</strong> DSV anche con una sola sud<strong>di</strong>visione. La soluzione calcolata tramite<br />
l’integrazione completa non è paragonabile, in termini <strong>di</strong> accuratezza, con quelle derivanti dagli altri<br />
meto<strong>di</strong>. Per ottenere la stessa precisione <strong>di</strong> 4 sud<strong>di</strong>visioni con elementi incompatibili o integrati in<br />
modo selettivo, occorrono 64 sud<strong>di</strong>visioni con elementi operanti con integrazione completa.<br />
Se il modulo <strong>di</strong> Poisson non è nullo, la soluzione derivante dagli elementi soli<strong>di</strong> con integrazione<br />
selettiva, converge ad un valore minore rispetto a quella calcolata con le funzioni <strong>di</strong> forma non<br />
compatibili.<br />
78
Applicazioni in campo elastico lineare Cap. 4<br />
4.5<br />
4<br />
3.5<br />
3<br />
freccia (mm)<br />
2.5<br />
2<br />
1.5<br />
1<br />
Freccia Selettiva / Incompatibili<br />
Freccia Completa<br />
Freccia De Saint Venant<br />
0.5<br />
0<br />
0 4 8 12 16 20 24 28 32 36 40 44 48 52 56 60 64<br />
Divisioni in asse<br />
Figura 5.4: Curve <strong>di</strong> convergenza dei 3 meto<strong>di</strong> stu<strong>di</strong>ati, per l'abbassamento della sezione caricata (ν = 0).<br />
0.18<br />
0.16<br />
0.14<br />
0.12<br />
Rotazione<br />
0.1<br />
0.08<br />
0.06<br />
0.04<br />
Selettiva / Incompatibili /<br />
De Saint Venant<br />
Completa<br />
0.02<br />
0<br />
0 4 8 12 16 20 24 28 32 36 40 44 48 52 56 60 64<br />
Divisioni in asse<br />
Figura 5.5: Curve <strong>di</strong> convergenza dei 3 meto<strong>di</strong> stu<strong>di</strong>ati, per la rotazione della sezione caricata (ν = 0).<br />
79
Applicazioni in campo elastico lineare Cap. 4<br />
4.5<br />
4<br />
3.5<br />
3<br />
Freccia (mm)<br />
2.5<br />
2<br />
1.5<br />
1<br />
Selettiva<br />
Completa<br />
De Saint Venant<br />
Incompatibile<br />
0.5<br />
0<br />
0 4 8 12 16 20 24 28 32 36 40 44 48 52 56 60 64<br />
Divisioni in asse<br />
Figura 5.6: Curve <strong>di</strong> convergenza dei 3 meto<strong>di</strong> stu<strong>di</strong>ati, per l'abbassamento della sezione caricata (ν = 0.2).<br />
0.18<br />
0.16<br />
0.14<br />
0.12<br />
Rotazione<br />
0.1<br />
0.08<br />
0.06<br />
0.04<br />
Selettiva<br />
Completa<br />
Incompatibili<br />
De Saint Venant<br />
0.02<br />
0<br />
0 4 8 12 16 20 24 28 32 36 40 44 48 52 56 60 64<br />
Divisioni in asse<br />
Figura 5.7: Curve <strong>di</strong> convergenza dei 3 meto<strong>di</strong> stu<strong>di</strong>ati, per la rotazione della sezione caricata (ν = 0.2).<br />
80
Applicazioni in campo elastico lineare Cap. 4<br />
4. Analisi <strong>di</strong> una trave doppiamente incastrata<br />
Come secondo esempio per testare la qualità dei 3 meto<strong>di</strong> <strong>di</strong> soluzioni stu<strong>di</strong>ati (integrazione<br />
completa, integrazione selettiva e funzioni <strong>di</strong> forma non compatibili) si esegue l’analisi <strong>di</strong> una trave<br />
incastrata alle due estremità e soggetta ad un carico <strong>di</strong>stribuito. I modelli su cui sono state eseguite le<br />
elaborazioni numeriche sono gli stessi dell’esempio precedente (con un cambio <strong>di</strong> vincolo e <strong>di</strong><br />
carico). Il materiale ipotizzato possiede sempre un modulo <strong>di</strong> Young E = 30000 MPa ed un modulo <strong>di</strong><br />
Poisson pari a 0.0 o 0.2 a seconda dei casi. Il carico <strong>di</strong>stribuito su tutta la campata è fissato a 1000<br />
N/m. La soluzione <strong>di</strong> De Saint Venant in termini <strong>di</strong> freccia massima (in mezzeria) fornisce:<br />
4<br />
4<br />
P ⋅ L 1⋅<br />
4000<br />
f = =<br />
= 0.16<br />
8<br />
384 ⋅ E ⋅ I 384 ⋅ 30000 ⋅1.3<br />
⋅10<br />
mm<br />
Spostamenti impe<strong>di</strong>ti<br />
Forze nodali applicate<br />
100<br />
200<br />
Spostamenti impe<strong>di</strong>ti<br />
Figura 5.8: Modello utilizzato con 4 sud<strong>di</strong>visioni lungo l'asse.<br />
Si espongono ora i risultati delle elaborazioni eseguite con modulo <strong>di</strong> Poisson nullo.<br />
81
Applicazioni in campo elastico lineare Cap. 4<br />
1.80E-01<br />
1.60E-01<br />
1.40E-01<br />
1.20E-01<br />
Freccia (mm)<br />
1.00E-01<br />
8.00E-02<br />
6.00E-02<br />
4.00E-02<br />
Selettiva / Incompatibile<br />
Completa<br />
De Saint Venant<br />
2.00E-02<br />
0.00E+00<br />
0 10 20 30 40 50 60<br />
Divisioni in asse<br />
Figura 5.9: Convergenza sulla freccia in mezzeria dei 3 meto<strong>di</strong> analizzati (ν = 0).<br />
Ascissa (m)<br />
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
0.00E+00<br />
2.00E-02<br />
4.00E-02<br />
6.00E-02<br />
Spostamento (mm)<br />
8.00E-02<br />
1.00E-01<br />
1.20E-01<br />
1.40E-01<br />
1.60E-01<br />
1.80E-01<br />
2 Sudd.<br />
4 Sudd.<br />
8 Sudd.<br />
16 Sudd.<br />
32 Sudd.<br />
64 Sudd.<br />
Figura 5.10: Deformata dell'asse calcolata con il metodo dell'integrazione selettiva (ν = 0).<br />
82
Applicazioni in campo elastico lineare Cap. 4<br />
0.00E+00<br />
Ascissa (m)<br />
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
2.00E-02<br />
4.00E-02<br />
6.00E-02<br />
Spostamento (mm)<br />
8.00E-02<br />
1.00E-01<br />
1.20E-01<br />
1.40E-01<br />
1.60E-01<br />
Selettiva / Incompatibile<br />
Linea Elastica<br />
Completa<br />
1.80E-01<br />
Figura 5.11: Deformata dell'asse calcolata con 16 sud<strong>di</strong>visiaoni (ν = 0).<br />
0.00E+00<br />
Ascissa (m)<br />
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
2.00E-02<br />
4.00E-02<br />
6.00E-02<br />
Spostamento (mm)<br />
8.00E-02<br />
1.00E-01<br />
1.20E-01<br />
1.40E-01<br />
1.60E-01<br />
Selettiva / Incompatibile<br />
Linea Elastica<br />
Completa<br />
1.80E-01<br />
Figura 5.12: Deformata dell'asse calcolata con 64 sud<strong>di</strong>visiaoni (ν = 0).<br />
83
Applicazioni in campo elastico lineare Cap. 4<br />
Dalle elaborazioni numeriche eseguite a modulo <strong>di</strong> Poisson nullo, risulta che la soluzione calcolata<br />
tramite i soli<strong>di</strong> incompatibili coincide con quella calcolata con l’integrazione selettiva. Si può notare<br />
anche in questo esempio come la velocità <strong>di</strong> convergenza del solido integrato in modo completo, sia<br />
nettamente inferiore a quella dei soli<strong>di</strong> che utilizzano meto<strong>di</strong> che riducono il locking a taglio. Per<br />
ottenere la stessa precisione (in termini <strong>di</strong> freccia) del modello con 64 sud<strong>di</strong>visioni e integrazione<br />
completa, è sufficiente utilizzare il modello a 8 sud<strong>di</strong>visioni con integrazione selettiva.<br />
Dai grafici <strong>di</strong> fig. 5.11 e 5.12 si nota che con 16 sud<strong>di</strong>visioni il modello che utilizza l’integrazione<br />
selettiva, o le funzioni <strong>di</strong> forma non compatibili, si sovrappone in maniera pressoché perfetta alla<br />
deformata teorica derivante dalla linea elastica mentre il modello con l’integrazione completa ne<br />
sottostima gli abbassamenti <strong>di</strong> circa il 40%. Passando poi al modello con 64 sud<strong>di</strong>visioni, il calcolo<br />
con l’integrazione selettiva risulta più accurato della stessa teoria <strong>di</strong> De Saint Venant (che non tiene<br />
conto della deformabilità a taglio).<br />
-1.50<br />
Ascissa (m)<br />
-1.00<br />
2 Sudd.<br />
4 Sudd.<br />
8 Sudd.<br />
16 Sudd.<br />
32 Sudd.<br />
64 Sudd.<br />
Momento (KN m)<br />
-0.50<br />
0.00<br />
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
0.50<br />
1.00<br />
Figura 5.13: Momento flettente dei vari modelli con integrazione selettiva (ν = 0).<br />
Per quanto riguarda le azioni interne, i modelli a integrazione completa o con funzioni non<br />
compatibili, forniscono buoni risultati.<br />
84
Applicazioni in campo elastico lineare Cap. 4<br />
-1.50<br />
Ascissa (m)<br />
-1.00<br />
4 Sudd.<br />
64 Sudd.<br />
De Saint Venant<br />
Momento (KN m)<br />
-0.50<br />
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
0.00<br />
0.50<br />
1.00<br />
Figura 5.14: Confronto con il momento flettente teorico (ν = 0).<br />
2.5<br />
Ascissa (m)<br />
2<br />
1.5<br />
1<br />
0.5<br />
Taglio (KN)<br />
0<br />
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
-0.5<br />
-1<br />
-1.5<br />
De Saint Venant<br />
32 Sud<strong>di</strong>visioni<br />
-2<br />
-2.5<br />
Figura 5.15: Confronto con il taglio teorico, i pallini in<strong>di</strong>cano il valore del taglio nel baricentro degli elementi.<br />
85
Applicazioni in campo elastico lineare Cap. 4<br />
Per i grafici 14 e 15 vanno aggiunte alcune precisazioni. Il momento è stato calcolato integrando sulla<br />
sezione le tensioni sigma che si ottengono negli 8 punti <strong>di</strong> Gauss, sia per il modello ad integrazione<br />
selettiva, sia per il modello con le funzioni <strong>di</strong> forma non compatibili. Il primo infatti utilizza<br />
l’integrazione completa per le tensioni sigma (e ridotta per le tau) mentre il secondo utilizza sempre<br />
l’integrazione completa, ma con 3 funzioni in più. Essendo in modulo <strong>di</strong> Poisson nullo si ha:<br />
( a + b ⋅ x + c ⋅ y + d ⋅ z + e ⋅ x ⋅ y + f ⋅ y ⋅ z + g ⋅ x ⋅ z + h ⋅ x ⋅ y ⋅ z)<br />
∂<br />
σ x<br />
= E ⋅ε<br />
x<br />
= E ⋅<br />
=<br />
∂x<br />
f ( y,<br />
z)<br />
Per cui la tensione in <strong>di</strong>rezione x, risulta costante, all’interno <strong>di</strong> un elemento, lungo l’asse X. Essendo<br />
poi nullo anche il modulo <strong>di</strong> Poisson, lo spostamento in <strong>di</strong>rezione X è costante lungo la larghezza<br />
della trave, per cui sparisce anche la <strong>di</strong>pendenza dalla coor<strong>di</strong>nata y. Le tensioni calcolata con<br />
l’integrazione selettiva sono risultate identiche a quelle calcolate con il modello con funzioni <strong>di</strong> forma<br />
incompatibili.<br />
Differente è il <strong>di</strong>scorso per quanto riguarda il taglio. La forza <strong>di</strong> taglio è stata anch’essa calcolata<br />
integrando le tau sulla sezione ma il modello con integrazione selettiva utilizza le tau calcolate nel<br />
solo baricentro dell’elemento, mentre il modello con le funzioni <strong>di</strong> forma non compatibili, utilizza le<br />
tau calcolate negli 8 punti <strong>di</strong> Gauss. I valori delle tau calcolate in questi 8 punti sono risultati identici<br />
al valore della tau calcolata nel baricentro dell’elemento integrato in modo selettivo. Per questi motivi<br />
i grafici 14 e 15 valgono per entrambi i modelli.<br />
Nettamente <strong>di</strong>versi sono i grafici del momento e del taglio per l’elemento integrato in modo<br />
completo. Se dai grafici 14 e 15 si nota che il valore del momento e del taglio calcolati nel baricentro<br />
(punto dell’integrazione ridotta ovvero punto ottimale per il calcolo delle tensioni), dai grafici 16 e 17<br />
si nota come solo infittendo la sud<strong>di</strong>visione i <strong>di</strong>agrammi del momento e del taglio si avvicinino a<br />
quelli teorici. Il <strong>di</strong>agramma del taglio rimane comunque ben lontano da quello teorico, anche con 64<br />
sud<strong>di</strong>visioni, solo valore del baricentro, si avvicina all’andamento corretto.<br />
86
Applicazioni in campo elastico lineare Cap. 4<br />
-1.5<br />
Ascissa (m)<br />
-1<br />
De Saint Venant<br />
16 Sud<strong>di</strong>visioni<br />
64 Sud<strong>di</strong>visioni<br />
Momento (KN m)<br />
-0.5<br />
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
0<br />
0.5<br />
1<br />
Figura 5.16: Diagramma del momento flettente derivante dal modello con integrazione completa (ν = 0).<br />
6<br />
Ascissa (m)<br />
4<br />
De Saint Venant<br />
64 Sud<strong>di</strong>visioni<br />
Deformata<br />
2<br />
Taglio (KN)<br />
0<br />
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
-2<br />
-4<br />
-6<br />
-8<br />
-10<br />
Figura 5.17: Diagramma del taglio derivante dal modello con integrazione completa (ν = 0).<br />
87
Applicazioni in campo elastico lineare Cap. 4<br />
2.5<br />
Ascissa (m)<br />
2<br />
1.5<br />
De Saint Venant<br />
64 Sud<strong>di</strong>visioni<br />
1<br />
Taglio (KN m)<br />
0.5<br />
0<br />
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
-0.5<br />
-1<br />
-1.5<br />
-2<br />
-2.5<br />
Figura 5.18: Valori me<strong>di</strong> del taglio all'interno degli elementi del modello ad integrazione completa (ν = 0).<br />
E’ interessante notare l’andamento del taglio <strong>di</strong> figura 5.17 e 5.18. All’interno <strong>di</strong> ogni elemento la τ<br />
subisce una variazione lineare in X. La pendenza <strong>di</strong> questa variazione cambia da elemento ad<br />
elemento, e si inverte in corrispondenza dei punti <strong>di</strong> flesso della deformata. Anche se l’andamento<br />
complessivo del taglio <strong>di</strong> figura 5.17, non rappresenta l’andamento teorico, i valori me<strong>di</strong> stimanti nel<br />
baricentro degli elementi si sovrappongono correttamente ai valori teorici. Del tutto <strong>di</strong>verso è invece<br />
l’andamento del momento flettente <strong>di</strong> figura 5.16, che coglie l’andamento corretto solo in maniera<br />
qualitativa, ed anche con 64 sud<strong>di</strong>visioni i valori corretti non vengono raggiunti nemmeno nel<br />
baricentro.<br />
I grafici delle azioni interne riportati in questo capitolo, sono ricavati integrando le rispettive tensioni<br />
(sigma per il momento e τ per il taglio) sulla sezione. Questi grafici possono indurre a credere che<br />
l’equilibrio globale non sia garantito, <strong>di</strong>fatti in figura 5.16 il momento d’incastro è ben lontano dal<br />
valore<br />
2<br />
p ⋅ l<br />
12<br />
necessario per l’equilibrio. Questa <strong>di</strong>fferenza è dovuta al fatto che in una soluzione per<br />
elementi finiti, l’equilibrio è garantito solamente in termini <strong>di</strong> variabili nodali.<br />
88
Applicazioni in campo elastico lineare Cap. 4<br />
Le forze nodali appartenenti ad un elemento si ricavano come:<br />
F<br />
e<br />
n n n<br />
T<br />
∫ B ⋅ ⋅ dV =<br />
Ve<br />
i= 1 j= 1 k = 1<br />
= ∑∑∑<br />
T<br />
[ B ⋅σ<br />
⋅ det( J )] ⋅Wi<br />
⋅W<br />
j<br />
⋅Wk<br />
σ (5.2)<br />
ijk<br />
Per l’elemento ad integrazione completa, per quello ad integrazione selettiva il prodotto matriciale va<br />
eseguito a blocchi, separando i termini taglianti da quelli normali, ed i primi vanno calcolati nel solo<br />
punto centrale. Esaminiamo il caso dell’integrazione completa, la generica forza in <strong>di</strong>rezione X del<br />
nodo m, vale (nel caso in esame si ha solo σ x e τ xz ) :<br />
F<br />
xm<br />
n<br />
n<br />
n<br />
= ∑∑∑<br />
i= 1 j= 1 k = 1<br />
⎡⎛<br />
∂N<br />
m<br />
⎢⎜<br />
⎣⎝<br />
∂x<br />
⋅<br />
∂N<br />
m<br />
σ<br />
x<br />
+ ⋅τ<br />
xz ⎟ ⋅ det( J ) ⋅Wi<br />
⋅W<br />
j<br />
⋅Wk<br />
(5.3)<br />
∂z<br />
⎞<br />
⎠<br />
⎤<br />
⎥<br />
⎦<br />
ijk<br />
La forza nodale in <strong>di</strong>rezione X <strong>di</strong>pende nel caso esaminato, non solo dalla σ x ma anche dalla τ xz .<br />
Eseguendo il calcolo del momento nella sezione <strong>di</strong> incastro, tramite le F x il valore<br />
2<br />
p ⋅ l<br />
12<br />
risulta<br />
verificato. Risolvendo la struttura tramite l’integrazione selettiva le σ e le τ assumono valori<br />
<strong>di</strong>fferenti, ma l’integrazione tramite la (5.2) fornisce le stesse reazioni vincolari calcolate con<br />
l’integrazione completa. Per le forze in <strong>di</strong>rezione Z (taglio), la (5.2) <strong>di</strong>viene (sempre nel caso<br />
dell’integrazione completa):<br />
F<br />
zm<br />
n<br />
n<br />
n<br />
= ∑∑∑<br />
i= 1 j= 1 k = 1<br />
⎡⎛<br />
∂N<br />
m<br />
⎢⎜<br />
⎣⎝<br />
∂x<br />
⎞ ⎤<br />
⋅τ xz ⎟ ⋅ det( J ) ⎥ ⋅Wi<br />
⋅W<br />
j<br />
⋅Wk<br />
(5.4)<br />
⎠ ⎦<br />
ijk<br />
Si nota che, per il caso considerato, l’equilibrio in <strong>di</strong>rezione Z è garantito dalla sola tensione τ xz (a<br />
<strong>di</strong>fferenza dell’equilibrio in <strong>di</strong>rezione X).<br />
Il <strong>di</strong>agramma del taglio incrocia il <strong>di</strong>agramma esatto nel baricentro degli elementi (figure 5.17 e<br />
5.18), questo punto è il punto <strong>di</strong> integrazione ridotta per l’elemento. Come illustrato in [Malerba] e in<br />
89
Applicazioni in campo elastico lineare Cap. 4<br />
[Barlow] i punti <strong>di</strong> integrazione ridotta sono particolari punti, detti anche “Optimal Sampling Points”<br />
in cui i valori <strong>di</strong> sforzo hanno lo stesso grado <strong>di</strong> accuratezza degli spostamenti nodali.<br />
L’elemento finito è in grado <strong>di</strong> descrivere in maniera “esatta” un campo <strong>di</strong> spostamenti con una<br />
variazione lineare, per cui avendo il grafico del taglio una variazione lineare, l’elemento fornisce la<br />
soluzione corretta nei sui “Optimal Sampling Points”, ovvero nel suo baricentro. La tensione σx ha<br />
invece una variazione parabolica lungo X, per cui l’elemento non ne da un valore corretto nemmeno<br />
nei suoi punti <strong>di</strong> integrazione ridotta, mentre si può notare dalla figura 5.19 che anche con 16<br />
elementi il valore della τ xz nel baricentro degli elementi è corretto.<br />
10<br />
Ascissa (m)<br />
8<br />
6<br />
De Saint Venant<br />
16 Sud<strong>di</strong>visioni<br />
Deformata<br />
4<br />
2<br />
Taglio (KN)<br />
0<br />
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
-2<br />
-4<br />
-6<br />
-8<br />
-10<br />
Figura 5.19: Diagramma del taglio derivante dal modello con integrazione completa (ν = 0).<br />
Dalle elaborazioni numeriche effettuate risulta che nel caso dell’integrazione selettiva la τ xz calcolata<br />
nel baricentro risulta esatta mentre nel caso si utilizzino le funzioni <strong>di</strong> forma non compatibili, la τ xz<br />
valutata negli 8 punti <strong>di</strong> gauss risulta pari al valore dalla τ xy nel baricentro.<br />
90
Applicazioni in campo elastico lineare Cap. 4<br />
Infine tutti i modelli sono stati analizzati considerando un modulo <strong>di</strong> Poisson pari a 0.2.<br />
1.80E-01<br />
1.60E-01<br />
1.40E-01<br />
1.20E-01<br />
Freccia (mm)<br />
1.00E-01<br />
8.00E-02<br />
6.00E-02<br />
Incompatibile<br />
Selettiva<br />
Completa<br />
Linea Elastica<br />
4.00E-02<br />
2.00E-02<br />
0.00E+00<br />
0 10 20 30 40 50 60<br />
Divisioni in asse<br />
Figura 5.20: Convergenza sulla freccia in mezzeria dei 3 meto<strong>di</strong> analizzati (ν = 0.2).<br />
Come anche osservato nel caso <strong>di</strong> una mensola caricata ad un’estremità, la soluzione ottenuta con<br />
l’integrazione selettiva, risulta più rigida <strong>di</strong> quella ottenuta con le funzioni <strong>di</strong> forma incompatibili.<br />
Notiamo infine che le soluzioni calcolate con 2 soli elementi lungo l’asse risultano coincidenti per i 3<br />
meto<strong>di</strong>, sia nel caso con ν = 0 che con ν = 0.2. In questo caso infatti, essendo la sud<strong>di</strong>visone<br />
esattamente in mezzeria, gli elementi sono soggetti ad uno stato <strong>di</strong> taglio puro e l’abbassamento<br />
risulterà pari a:<br />
s =<br />
p ⋅ L<br />
8<br />
2<br />
2 ⋅ (1 + ν )<br />
⋅<br />
A ⋅ E<br />
trovati dall’analisi numerica.<br />
che fornisce 0 .003<br />
mm se ν = 0 e 0.004 mm se ν = 0.2 in accordo coi risultati<br />
91
Applicazioni in campo elastico lineare Cap. 4<br />
5. Stu<strong>di</strong>o della deformabilità trasversale e dell’ingobbimento sezionale <strong>di</strong> un<br />
elemento in parete sottile a profilo rettangolare chiuso.<br />
Si fa riferimento ad un elemento incastrato ad una estremità e soggetto ad una coppia torcente<br />
all’estremità opposta, avente un rapporto geometrico tra <strong>di</strong>mensione minima della sezione e<br />
lunghezza pari ad 1/10. Si stu<strong>di</strong>ano <strong>di</strong>versi casi al variare dei seguenti parametri, α = t/h, β = b/h,<br />
avendo in<strong>di</strong>cato con t lo spessore del profilo e con h e b, rispettivamente la minima e la massima<br />
<strong>di</strong>mensione trasversale della sezione.<br />
Figura 5.21: Assonometria e sezione trasversale dell'elemento.<br />
La deformabilità trasversale e l’ingobbimento sezionale del profilo vengono quantificati me<strong>di</strong>ante i<br />
parametri D max e I max. Il parametro I max rappresenta il valore massimo dell’ingobbimento presente<br />
nella sezione, mentre D max è la massima <strong>di</strong>fferenza tra la posizione <strong>di</strong> un punto, appartenente alla<br />
sezione in posizione deformata, e la posizione che avrebbe lo stesso punto se la sezione ruotasse<br />
rigidamente.<br />
92
Applicazioni in campo elastico lineare Cap. 4<br />
Rotazione rigida<br />
Figura 5.22: Rappresentazione dei parametri D max e I max .<br />
Si riporta graficamente la variazione <strong>di</strong> questi parametri al variare <strong>di</strong> α e β nei seguenti intervalli:<br />
0.025 < α < 0.1 5 cm < t < 20 cm<br />
1 < β < 2 200 cm < b < 400 cm<br />
L’altezza h della sezione (200 cm) e la lunghezza l dell’elemento (2000 cm) vengono mantenuti<br />
costanti in tutte le elaborazioni effettuate. Il materiale utilizzato ha la seguenti caratteristiche<br />
meccaniche: E = 30000 MPa, ν = 0.2, mentre la sollecitazione torcente ha il valore <strong>di</strong> M t = 1 MNm.<br />
In ultimo si riportano i grafici a<strong>di</strong>mensionalizzati rispetto alla quantità<br />
la rotazione me<strong>di</strong>a equivalente della sezione.<br />
h<br />
ϕ ⋅ , dove con ϕ si è in<strong>di</strong>cata<br />
2<br />
93
Applicazioni in campo elastico lineare Cap. 4<br />
Figura 5.23: Rappresentazione in 3D del parametro <strong>di</strong> rotazione me<strong>di</strong>a (rad).<br />
94
Applicazioni in campo elastico lineare Cap. 4<br />
0.006<br />
0.005<br />
Valore parametro <strong>di</strong> rotazione<br />
0.004<br />
0.003<br />
0.002<br />
0.001<br />
β (b/h)<br />
0.000<br />
0.025 0.030 0.035 0.040 0.045 0.050 0.055 0.060 0.065 0.070 0.075 0.080 0.085 0.090 0.095 0.100<br />
α (t/h)<br />
Figura 5.24: Rotazione me<strong>di</strong>a in funzione del parametro α.<br />
0.006<br />
0.005<br />
Valore parametro <strong>di</strong> rotazione<br />
0.004<br />
0.003<br />
0.002<br />
0.001<br />
α (t/h)<br />
0.000<br />
1 2 3 4 5 6 7 8 9 10 11<br />
β (b/h)<br />
Figura 5.25: Rotazione me<strong>di</strong>a in funzione del parametro β.<br />
95
Applicazioni in campo elastico lineare Cap. 4<br />
Figura 5.26: Rappresentazione in 3D del parametro <strong>di</strong> ingobbimento (rad).<br />
96
Applicazioni in campo elastico lineare Cap. 4<br />
0.006<br />
0.005<br />
β (b/h)<br />
Valore parametro <strong>di</strong> ingobbimento (cm)<br />
0.004<br />
0.003<br />
0.002<br />
0.001<br />
0.000<br />
0.025 0.030 0.035 0.040 0.045 0.050 0.055 0.060 0.065 0.070 0.075 0.080 0.085 0.090 0.095 0.100<br />
α (t/h)<br />
Figura 5.27: Ingobbimento in funzione del paramentro α.<br />
0.006<br />
0.005<br />
0.004<br />
0.003<br />
0.002<br />
Valore parametro <strong>di</strong> ingobbimento (cm)<br />
α (t/h)<br />
0.001<br />
0.000<br />
11<br />
10<br />
9<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
β (b/h)<br />
Figura 5.28: Ingobbimento in funzione del paramentro β.<br />
97
Applicazioni in campo elastico lineare Cap. 4<br />
Figura 5.29: Rappresentazione in 3D del parametro <strong>di</strong> rotazione me<strong>di</strong>a (rad).<br />
98
Applicazioni in campo elastico lineare Cap. 4<br />
0.020<br />
0.018<br />
0.016<br />
Valore parametro <strong>di</strong> per<strong>di</strong>ta <strong>di</strong> forma (cm)<br />
0.014<br />
0.012<br />
0.010<br />
0.008<br />
0.006<br />
β (b/h)<br />
0.004<br />
0.002<br />
0.000<br />
0.025 0.030 0.035 0.040 0.045 0.050 0.055 0.060 0.065 0.070 0.075 0.080 0.085 0.090 0.095 0.100<br />
α (t/h)<br />
Figura 5.29: Per<strong>di</strong>ta <strong>di</strong> forma in funzione del paramentro α.<br />
0.020<br />
0.018<br />
0.016<br />
Valore parametro <strong>di</strong> per<strong>di</strong>ta <strong>di</strong> forma (cm)<br />
0.014<br />
0.012<br />
0.010<br />
0.008<br />
0.006<br />
α (t/h)<br />
0.004<br />
0.002<br />
0.000<br />
1 2 3 4 5 6 7 8 9 10 11<br />
β (b/h)<br />
Figura 5.30: Per<strong>di</strong>ta <strong>di</strong> forma in funzione del paramentro β.<br />
99
Applicazioni in campo elastico lineare Cap. 4<br />
6. Patch Test per l’elemento solido con acciaio <strong>di</strong>ffuso<br />
Per il solo co<strong>di</strong>ce <strong>di</strong> calcolo operante con l’integrazione selettiva, si esegue un Patch Test a trazione<br />
sulla struttura già analizzata negli esempi 1 e 2 avendo aggiunto dell’armatura <strong>di</strong>ffusa lungo le 3<br />
<strong>di</strong>rezioni cartesiane. Il materiale ipotizzato possiede una E c = 40 MPa, ν = 0.2, E s = 200 MPa, ρ x =<br />
0.1, ρ y = 0.05, ρ z = 0.01. Per semplificare i conti <strong>di</strong> prova che si eseguono senza l’ausilio del co<strong>di</strong>ce<br />
<strong>di</strong> calcolo, la struttura viene vincolata come in figura 5.31:<br />
z<br />
y<br />
Faccia vincolata in X<br />
Faccia con ce<strong>di</strong>menti<br />
unitari<br />
x<br />
Faccia vincolata in Y<br />
Faccia vincolata in Z<br />
Figura 5.31: Vincoli assunti.<br />
Rispetto agli esempi 1 e 2 solo le quattro facce in<strong>di</strong>cate risultano vincolate (3 con vincoli fissi ed 1<br />
con ce<strong>di</strong>menti imposti) e i vincoli sono posti solamente nella <strong>di</strong>rezione dell’asse perpen<strong>di</strong>colare alla<br />
faccia. Come negli esempi 1 e 2 il ce<strong>di</strong>mento in <strong>di</strong>rezione X è stato imposto unitario e la mesh <strong>di</strong> 8<br />
elementi risulta <strong>di</strong>storta dalla posizione del nodo interno.<br />
Per avere dei risultati da confrontare con quelli ottenuti dal co<strong>di</strong>ce <strong>di</strong> calcolo, il problema è stato<br />
risolto tramite il metodo delle forze. Il metodo delle forze permette <strong>di</strong> scrivere le equazioni risolventi<br />
il problema, dopo aver tolto dei vincoli dalla struttura originaria; le equazioni che si dovranno<br />
scrivere saranno perciò <strong>di</strong> congruenza. In questo esempio si è scelto <strong>di</strong> degradare il vincolo a terra in<br />
<strong>di</strong>rezione X, assegnando la reazione R al solido.<br />
100
Applicazioni in campo elastico lineare Cap. 4<br />
Risulta poi necessario degradare i 3 vincoli interni tra il solido e l’armatura, mettendo perciò in<br />
evidenza le 3 reazioni interne esistenti tra il solido e l’armatura: F x , F y , F z . In figura 5.32 si riporta per<br />
semplicità un analogo caso in 2D con ce<strong>di</strong>mento in <strong>di</strong>rezione Y.<br />
Ce<strong>di</strong>mento<br />
R<br />
Ce<strong>di</strong>mento<br />
Fy<br />
R + Fy<br />
Fx<br />
R + Fy<br />
Fx<br />
Fx<br />
Fx<br />
R<br />
Fy<br />
Figura 5.32: Struttura degradata per il caso piano.<br />
Si deve quin<strong>di</strong> scrivere 4 equazioni <strong>di</strong> congruenza, la prima tra il solido ed il vincolo a terra, le altre 3<br />
tra il solido e l’armatura <strong>di</strong>ffusa. In queste equazione deve essere tenuta in conto anche la<br />
deformazione per effetto Poisson. Il sistema risolvente è:<br />
⎡ b<br />
⎢ Ec<br />
⋅ Ac<br />
⎢<br />
⎢<br />
⎢<br />
b<br />
⎢ Ec<br />
⋅ Ac<br />
⎢<br />
⎢ ν ⋅ b<br />
⎢−<br />
⎢ Ec<br />
⋅ A<br />
⎢<br />
⎢ ν ⋅ b<br />
⎢<br />
−<br />
⎣ Ec<br />
⋅ A<br />
c<br />
c<br />
⎛<br />
⎜<br />
⎝ E<br />
c<br />
b<br />
⋅ A<br />
b<br />
E ⋅ A<br />
c<br />
c<br />
+<br />
E<br />
ν ⋅ b<br />
−<br />
E ⋅ A<br />
c<br />
ν ⋅ b<br />
−<br />
E ⋅ A<br />
c<br />
c<br />
sx<br />
c<br />
c<br />
b<br />
⋅ A<br />
sx<br />
⎞<br />
⎟<br />
⎠<br />
⎛<br />
⎜<br />
⎝ E<br />
c<br />
ν ⋅ b<br />
−<br />
E ⋅ A<br />
ν ⋅ b<br />
−<br />
E ⋅ A<br />
b<br />
⋅ A<br />
c<br />
c<br />
c<br />
+<br />
E<br />
ν ⋅ b<br />
−<br />
E ⋅ A<br />
c<br />
c<br />
c<br />
sy<br />
c<br />
b<br />
⋅ A<br />
sy<br />
⎞<br />
⎟<br />
⎠<br />
⎛<br />
⎜<br />
⎝ E<br />
c<br />
ν ⋅ b<br />
−<br />
E ⋅ A<br />
ν ⋅ b<br />
−<br />
E ⋅ A<br />
ν ⋅ b<br />
−<br />
E ⋅ A<br />
b<br />
⋅ A<br />
c<br />
c<br />
c<br />
c<br />
+<br />
E<br />
c<br />
c<br />
c<br />
sz<br />
b<br />
⋅ A<br />
sz<br />
⎤<br />
⎥ ⎡ R ⎤ ⎡∆⎤<br />
⎥ ⎢ ⎥ ⎢ ⎥<br />
⎥ ⎢ ⎥ ⎢ ⎥<br />
⎥ ⎢ ⎥ ⎢ ⎥<br />
⎢<br />
Fx<br />
⎥ ⎢<br />
0<br />
⎥ ⎥<br />
⎥ ⋅ ⎢ ⎥ = ⎢ ⎥<br />
⎥ ⎢ ⎥ ⎢ ⎥<br />
⎥ ⎢F<br />
⎥ ⎢ ⎥<br />
y<br />
0<br />
⎥ ⎢ ⎥ ⎢ ⎥<br />
⎥ ⎢ ⎥ ⎢ ⎥<br />
⎞⎥<br />
⎢ ⎥ ⎢ ⎥<br />
⎟<br />
⎥ ⎢⎣<br />
Fz<br />
⎥⎦<br />
⎢⎣<br />
0⎥⎦<br />
⎠⎦<br />
(5.6)<br />
Dove ∆ è il ce<strong>di</strong>mento e b è il lato del cubo. I risultati ottenuti sono: R = 120.8130582 N, F x = -40.0<br />
N, F y = 3.264551894 N, F z = 0.8007391435, che in termini <strong>di</strong> tensioni nel solido <strong>di</strong>vengono: σ x =<br />
20.203265 MPa, σ y = 0.81613797 MPa, σ z = 0.2001847859 MPa.<br />
101
Applicazioni in campo elastico lineare Cap. 4<br />
I risultati ottenuti col co<strong>di</strong>ce <strong>di</strong> calcolo sono:<br />
PT G SIGMA X SIGMA Y SIGMA Z TAU XY TAU YZ TAU XZ<br />
1 .2020E+02 .8161E+00 .2002E+00 .0000E+00 .0000E+00 .0000E+00<br />
2 .2020E+02 .8161E+00 .2002E+00 .0000E+00 .0000E+00 .0000E+00<br />
3 .2020E+02 .8161E+00 .2002E+00 .0000E+00 .0000E+00 .0000E+00<br />
4 .2020E+02 .8161E+00 .2002E+00 .0000E+00 .0000E+00 .0000E+00<br />
5 .2020E+02 .8161E+00 .2002E+00 .0000E+00 .0000E+00 .0000E+00<br />
6 .2020E+02 .8161E+00 .2002E+00 .0000E+00 .0000E+00 .0000E+00<br />
7 .2020E+02 .8161E+00 .2002E+00 .0000E+00 .0000E+00 .0000E+00<br />
8 .2020E+02 .8161E+00 .2002E+00 .0000E+00 .0000E+00 .0000E+00<br />
9 .2020E+02 .8161E+00 .2002E+00 .0000E+00 .0000E+00 .0000E+00<br />
mentre lo spostamento del punto centrale (<strong>di</strong> coor<strong>di</strong>nate 0.2, 0.1, 0.3) risulta:<br />
u = 6.000000000000001E-001<br />
v = -8.977517708654141E-002<br />
w = -1.301201108715740E-001<br />
Lo spostamento esatto del punto centrale è pari a 0.6 mm in <strong>di</strong>rezione X (variazione lineare del<br />
ce<strong>di</strong>mento imposto), mentre per agli altri 2 spostamenti:<br />
ε<br />
y<br />
σ<br />
y ν<br />
= − ⋅ ( σ<br />
x<br />
+ σ<br />
z<br />
) = −0.0816138<br />
E E<br />
c<br />
c<br />
σ<br />
z ν<br />
ε<br />
z<br />
= − ⋅ ( σ<br />
x<br />
+ σ<br />
y<br />
) = −0.100092<br />
E E<br />
c<br />
c<br />
v =<br />
ε y<br />
b<br />
⋅( + 0.1) = −0.0897752<br />
2<br />
w =<br />
ε z<br />
b<br />
⋅( + 0.3) = −0.130120<br />
2<br />
In accordo coi risultati forniti dal co<strong>di</strong>ce <strong>di</strong> calcolo.<br />
102
Applicazioni in campo elastico lineare Cap. 4<br />
7. Patch Test per l’elemento solido con acciaio embedded<br />
Si è ripetuto l’esempio 6 sostituendo all’armatura <strong>di</strong>ffusa delle barre embedded <strong>di</strong> pari area. Per<br />
semplicità si è scelto <strong>di</strong> utilizzare la mesh <strong>di</strong> 8 elementi non <strong>di</strong>storti ma non simmetrici (il punto<br />
centrale ha coor<strong>di</strong>nate 0.2, 0.1, 0.3). In ogni <strong>di</strong>rezione si sono inserite 4 barre <strong>di</strong> armatura in modo che<br />
ogni elemento abbia 3 barre embedded al suo interno.<br />
z<br />
y<br />
x<br />
Figura 5.33: Visualizzazione della sola armatura in <strong>di</strong>rezione Y.<br />
Per poter rappresentare un modello analogo all’esempio 6, le barre vengono posizionate in modo che<br />
passino per i baricentri dei singoli elementi finiti. L’area della barra viene calcolata in modo che<br />
rappresenti l’armatura <strong>di</strong>ffusa all’interno del singolo elemento. Ad esempio, le prime nove barre<br />
avranno le seguenti caratteristiche:<br />
Xa Ya Za Xb Yb Zb Es As Eps0 Ele<br />
-1.00 0.55 0.65 0.20 0.55 0.65 200.00 0.0630 0.0 1<br />
-0.40 0.10 0.65 -0.40 1.00 0.65 200.00 0.0420 0.0 1<br />
-0.40 0.55 0.30 -0.40 0.55 1.00 200.00 0.0108 0.0 1<br />
-1.00 -0.45 0.65 0.20 -0.45 0.65 200.00 0.0770 0.0 2<br />
-0.40 -1.00 0.65 -0.40 0.10 0.65 200.00 0.0420 0.0 2<br />
-0.40 -0.45 0.30 -0.40 -0.45 1.00 200.00 0.0132 0.0 2<br />
-1.00 0.55 -0.35 0.20 0.55 -0.35 200.00 0.1170 0.0 3<br />
-0.40 0.10 -0.35 -0.40 1.00 -0.35 200.00 0.0780 0.0 3<br />
-0.40 0.55 -1.00 -0.40 0.55 0.30 200.00 0.0108 0.0 3<br />
103
Applicazioni in campo elastico lineare Cap. 4<br />
I risultati coincidono con quelli calcolati nell’esempio 5, le tensioni nel solido sono:<br />
PT G SIGMA X SIGMA Y SIGMA Z TAU XY TAU YZ TAU XZ<br />
1 .2020E+02 .8161E+00 .2002E+00 .0000E+00 .0000E+00 .0000E+00<br />
2 .2020E+02 .8161E+00 .2002E+00 .0000E+00 .0000E+00 .0000E+00<br />
3 .2020E+02 .8161E+00 .2002E+00 .0000E+00 .0000E+00 .0000E+00<br />
***<br />
8 .2020E+02 .8161E+00 .2002E+00 .0000E+00 .0000E+00 .0000E+00<br />
9 .2020E+02 .8161E+00 .2002E+00 .0000E+00 .0000E+00 .0000E+00<br />
mentre lo spostamento del punto centrale (<strong>di</strong> coor<strong>di</strong>nate 0.2, 0.1, 0.3) risulta:<br />
u = 6.000000000000002E-001<br />
v = -8.977517708654144E-002<br />
w = -1.301201108715734E-001<br />
e coincide con quello calcolato nell’esempio 6. Infatti anche se le due mesh hanno geometria <strong>di</strong>versa<br />
a livello dei singoli elementi (l’esempio 6 ha una mesh <strong>di</strong>storta), il punto centrale ha sempre<br />
coor<strong>di</strong>nate 0.2, 0.1, 0.3.<br />
La struttura è stata poi analizzata ponendo nullo il modulo <strong>di</strong> Poisson, i risultati trovati sono, in<br />
termini <strong>di</strong> tensioni:<br />
PT G SIGMA X SIGMA Y SIGMA Z TAU XY TAU YZ TAU XZ<br />
1 .2000E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
2 .2000E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
3 .2000E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
***<br />
8 .2000E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
9 .2000E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
e in termini <strong>di</strong> spostamento del punto centrale:<br />
u = 6.000000000000014E-001<br />
v = -1.423827492354191E-016<br />
w = 1.484372108007727E-016<br />
L’unica tensione non nulla risulta in <strong>di</strong>rezione X, poiché non essendoci effetto Poisson la congruenza<br />
in <strong>di</strong>rezione Y e Z tra il solido e l’armatura è automaticamente verificata già nella posizione<br />
indeformata. Difatti il punto centrale subisce uno spostamento solo in <strong>di</strong>rezione X in cui avviene il<br />
ce<strong>di</strong>mento imposto.<br />
104
Applicazioni in campo elastico lineare Cap. 4<br />
8. Patch Test per l’elemento solido presollecitato.<br />
Alla struttura dell’esempio 7 vengono tolti i vincoli che impongono il ce<strong>di</strong>mento, e viene inserita una<br />
deformazione iniziale delle armature in <strong>di</strong>rezione X pari al 10%. La precompressione inserita nel<br />
co<strong>di</strong>ce <strong>di</strong> calcolo non tiene conto delle per<strong>di</strong>te elastiche (verrà infatti usata per rappresentare cavi<br />
post-tesi) e si riduce al calcolo delle forze equivalenti come visto al punto (2.47) :<br />
F<br />
p<br />
= A⋅<br />
E<br />
c<br />
⋅<br />
T T<br />
( N − N ) ⋅T<br />
⋅ε<br />
bi<br />
A<br />
B<br />
z<br />
y<br />
Direzione presollecitata<br />
Faccia vincolata in X<br />
x<br />
Faccia vincolata in Y<br />
Faccia vincolata in Z<br />
Figura 5.34: Rappresentazione della struttura presollecitata.<br />
I risultati in termini <strong>di</strong> tensioni sono:<br />
PT G SIGMA X SIGMA Y SIGMA Z TAU XY TAU YZ TAU XZ<br />
1 -.1338E+01 -.5404E-01 -.1326E-01 .0000E+00 .0000E+00 .0000E+00<br />
2 -.1338E+01 -.5404E-01 -.1326E-01 .0000E+00 .0000E+00 .0000E+00<br />
***<br />
7 -.1338E+01 -.5404E-01 -.1326E-01 .0000E+00 .0000E+00 .0000E+00<br />
8 -.1338E+01 -.5404E-01 -.1326E-01 .0000E+00 .0000E+00 .0000E+00<br />
9 -.1338E+01 -.5404E-01 -.1326E-01 .0000E+00 .0000E+00 .0000E+00<br />
Il calcolo delle tensioni corrette all’interno della struttura può essere eseguito col metodo delle forze,<br />
come visto nell’esempio 5.<br />
105
Applicazioni in campo elastico lineare Cap. 4<br />
Per questo calcolo l’armatura verrà considerata come <strong>di</strong>stribuita, avendo già comprovato<br />
l’equivalenza tra i due modelli analizzati. La forza equivalente <strong>di</strong> precompressione agente sulle facce<br />
perpen<strong>di</strong>colari all’asse X, risulta:<br />
Fp = Asx<br />
⋅ Esx<br />
⋅ε<br />
i<br />
= 0 .4 ⋅ 200 ⋅ 0.1 = 8<br />
N<br />
Il sistema risolvente è:<br />
⎡⎛<br />
⎢<br />
⎜<br />
⎢⎝<br />
E<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢⎣<br />
c<br />
b<br />
⋅ A<br />
c<br />
+<br />
E<br />
ν ⋅ b<br />
−<br />
E ⋅ A<br />
c<br />
ν ⋅ b<br />
−<br />
E ⋅ A<br />
c<br />
sx<br />
c<br />
c<br />
b<br />
⋅ A<br />
sx<br />
⎞<br />
⎟<br />
⎠<br />
⎛<br />
⎜<br />
⎝ E<br />
c<br />
ν ⋅ b<br />
−<br />
E ⋅ A<br />
b<br />
⋅ A<br />
c<br />
c<br />
+<br />
E<br />
ν ⋅ b<br />
−<br />
E ⋅ A<br />
c<br />
c<br />
sy<br />
c<br />
b<br />
⋅ A<br />
sy<br />
⎞<br />
⎟<br />
⎠<br />
⎛<br />
⎜<br />
⎝ E<br />
c<br />
ν ⋅ b<br />
−<br />
E ⋅ A<br />
ν ⋅ b<br />
−<br />
E ⋅ A<br />
b<br />
⋅ A<br />
c<br />
c<br />
c<br />
+<br />
E<br />
c<br />
c<br />
sz<br />
b<br />
⋅ A<br />
sz<br />
⎤<br />
⎥ ⎡F<br />
⎥ ⎢<br />
⎥ ⎢<br />
⎥ ⋅ ⎢F<br />
⎥ ⎢<br />
⎞⎥<br />
⎢<br />
⎥ ⎢<br />
⎟ ⎣F<br />
⎠⎥⎦<br />
x<br />
y<br />
z<br />
⎡ b ⋅ Fp<br />
⎤ ⎢<br />
⎥ ⎢<br />
Ec<br />
⋅ Ac<br />
⎥ ⎢ ν ⋅ b ⋅ F<br />
⎥ = ⎢−<br />
⎥ ⎢ Ec<br />
⋅ Ac<br />
⎥ ⎢ ν ⋅ b ⋅ F<br />
⎥<br />
⎦ ⎢−<br />
⎢⎣<br />
Ec<br />
⋅ Ac<br />
p<br />
p<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥⎦<br />
(5.7)<br />
Dove come <strong>di</strong> consuetu<strong>di</strong>ne, si è in<strong>di</strong>cato con Fi la forza scambiata tra armatura e solido in <strong>di</strong>rezione<br />
i. I risultati ottenuti sono: F x = 2.648720302 N, F y = -.2161721220 N, F z = -.5302335068,<br />
che in termini <strong>di</strong> tensioni nel solido <strong>di</strong>vengono: σ x = -1.337820 MPa, σ y = -0.0540430 MPa, σ z = -<br />
0.132558 MPa. I risultati ottenuti col co<strong>di</strong>ce <strong>di</strong> calcolo sono:<br />
PT G SIGMA X SIGMA Y SIGMA Z TAU XY TAU YZ TAU XZ<br />
1 -.1338E+01 -.5404E-01 -.1326E-01 .0000E+00 .0000E+00 .0000E+00<br />
2 -.1338E+01 -.5404E-01 -.1326E-01 .0000E+00 .0000E+00 .0000E+00<br />
3 -.1338E+01 -.5404E-01 -.1326E-01 .0000E+00 .0000E+00 .0000E+00<br />
4 -.1338E+01 -.5404E-01 -.1326E-01 .0000E+00 .0000E+00 .0000E+00<br />
5 -.1338E+01 -.5404E-01 -.1326E-01 .0000E+00 .0000E+00 .0000E+00<br />
6 -.1338E+01 -.5404E-01 -.1326E-01 .0000E+00 .0000E+00 .0000E+00<br />
7 -.1338E+01 -.5404E-01 -.1326E-01 .0000E+00 .0000E+00 .0000E+00<br />
8 -.1338E+01 -.5404E-01 -.1326E-01 .0000E+00 .0000E+00 .0000E+00<br />
9 -.1338E+01 -.5404E-01 -.1326E-01 .0000E+00 .0000E+00 .0000E+00<br />
Risultano perciò corretti. Non si riporta il controllo sullo spostamento del nodo centrale che<br />
comunque risulta corretto.<br />
106
Applicazioni in campo elastico lineare Cap. 4<br />
9. Pilastro soggetto a peso proprio<br />
Gli stessi modelli utilizzati nell’esempio 3 (ve<strong>di</strong> la figura 5.3) vengono ora riproposti per lo stu<strong>di</strong>o <strong>di</strong><br />
un pilastro soggetto al solo peso proprio. Il pilastro è costituito da un solo materiale (senza armature)<br />
avente E = 30.000 MPa, ν = 0.0, γ x = 3750.0 KN / m 3 .<br />
La soluzione del problema è nota dalla teoria dell’elasticità:<br />
x<br />
x = L<br />
d<br />
σ x<br />
x<br />
+ σ ⋅ dx<br />
dx<br />
γ<br />
dx<br />
x = 0<br />
σ x<br />
Figura 5.35: Rappresentazione del problema nella teoria dell'elasticità.<br />
L’equazione <strong>di</strong>fferenziale negli spostamenti che regge il problema in esame è:<br />
2<br />
∂ u γ<br />
=<br />
2<br />
∂x<br />
E<br />
(5.8)<br />
Una volta integrata, ed imposto le con<strong>di</strong>zioni al contorno, si hanno:<br />
γ 2<br />
u = ⋅ x<br />
2 ⋅ E<br />
γ ⋅ L<br />
− ⋅ x<br />
E<br />
(5.9)<br />
σ = γ ⋅ ( x − L)<br />
(5.10)<br />
x<br />
107
Applicazioni in campo elastico lineare Cap. 4<br />
Ascissa (m)<br />
0<br />
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
-0.2<br />
Abbassamento (mm)<br />
-0.4<br />
-0.6<br />
-0.8<br />
De Saint Venant<br />
2 Sud<strong>di</strong>visioni<br />
8 Sud<strong>di</strong>visioni<br />
-1<br />
-1.2<br />
Figura 5.36: Abbassamento lungo l'asse del pilastro.<br />
Ascissa (m)<br />
0<br />
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
-2<br />
-4<br />
-6<br />
Sigma x (MPa)<br />
-8<br />
-10<br />
-12<br />
De Saint Venant<br />
2 Sud<strong>di</strong>visioni<br />
8 Sud<strong>di</strong>visioni<br />
32 Sud<strong>di</strong>visioni<br />
-14<br />
-16<br />
Figura 5.37: Tensione lungo l'asse del pilastro.<br />
Da notare che per cogliere in maniera ottima la deformata e con un errore massimo del 10% la<br />
tensione, sono sufficienti 8 elementi.<br />
108
Applicazioni in campo elastico lineare Cap. 4<br />
10. Stu<strong>di</strong>o <strong>di</strong> una pila da ponte a profilo misto in campo elastico lineare<br />
Scopo centrale del presente lavoro è lo stu<strong>di</strong>o in campo non lineare della risposta <strong>di</strong> una pila da ponte<br />
binata soggetta ad un carico monotonamente crescente. Dopo aver eseguito vari esempi con lo scopo<br />
<strong>di</strong> assicurarsi del corretto funzionamento del co<strong>di</strong>ce <strong>di</strong> calcolo implementato, verranno qua riportati<br />
gli stu<strong>di</strong> eseguiti in campo elastico lineare con lo scopo <strong>di</strong> costruire un adeguato modello in grado <strong>di</strong><br />
cogliere il comportamento della struttura.<br />
900<br />
V<br />
V<br />
40<br />
50<br />
40<br />
20<br />
110<br />
60<br />
Asse del ponte<br />
600<br />
820<br />
4250<br />
(32+32) φ18<br />
per parete<br />
(8+8) φ18<br />
per lama<br />
hp<br />
(53+53) φ30<br />
per lama<br />
(2+2) cavi<br />
per lama<br />
46<br />
46<br />
46<br />
46<br />
46<br />
46<br />
45<br />
107.5<br />
Figura 5.38: Geometria della pila binata (misure in cm).<br />
109
Applicazioni in campo elastico lineare Cap. 4<br />
La tipologia della pila da ponte esaminata è <strong>di</strong> tipo misto (o binata), la pila risulta infatti sud<strong>di</strong>visa in<br />
due parti:<br />
- una prima parte (nella zona inferiore) costituita da un cassone monocellulare composto<br />
da due pareti principali sagomate, trasversali rispetto all’asse del ponte collegate mutuamente da due<br />
setti arretrati e posizionati all’inizio della sagomatura.<br />
- Una seconda parte (nella zona superiore) costituita da due lame in<strong>di</strong>pendenti collegate<br />
solo in sommità, ottenute come prolungamento delle pareti principali del cassone.<br />
Con riferimento alla figura 5.38 l’estensione relativa al primo tratto <strong>di</strong> altezza h p viene caratterizzata<br />
tramite il parametro <strong>di</strong>mensionale α = h p / h, dove h = 42.5 m. Alla base la pila viene considerata<br />
incastrata rigidamente, e non si eseguirà nessuna modellazione della fondazione o del terreno. In<br />
sommità, essa termina con un tratto molto rigido che, <strong>di</strong> fatto, impone alle due estremità delle lame<br />
gli stessi spostamenti e le stesse rotazioni. La struttura è precompressa tramite una serie <strong>di</strong> cavi<br />
verticali <strong>di</strong>sposti lungo gli assi <strong>di</strong> ciascuna delle due lame e lunghi quanto l’intera pila. La forza totale<br />
<strong>di</strong> precompressione P in ciascuna lama vale 10 MN. L’altezza totale della pila è pari a 42.5 m ed il<br />
carico verticale su ciascuna lama è V = 30 MN. Le caratteristiche geometriche delle sezioni<br />
trasversali e le <strong>di</strong>sposizioni dell’armatura longitu<strong>di</strong>nale vengono mostrate in figura 5.38. Come<br />
armatura trasversale viene considerata una staffatura <strong>di</strong> 1φ10 ogni 10 cm lungo tutto il profilo della<br />
pila. Per i materiali si considerano le seguenti caratteristiche <strong>di</strong> base:<br />
Calcestruzzo: f c0 = -33.2 MPa ε c0 = -0.002 ε cu = -0.0035<br />
Acciaio normale: f sy = 430 MPa E s = 210 GPa ε su = -0.01<br />
Acciaio da precompressione: f py = 1600 MPa E p = 200 GPa ε pu = -0.01<br />
Il modulo <strong>di</strong> rigi<strong>di</strong>tà tangente del calcestruzzo viene assunto pari a (Euroco<strong>di</strong>ce 2):<br />
1/ 3<br />
Ec0 = 9500 ⋅ f<br />
c0<br />
= 30533<br />
MPa<br />
110
Applicazioni in campo elastico lineare Cap. 4<br />
Per quanto riguarda il livello <strong>di</strong> precompressione nei cavi, si assume una tensione a per<strong>di</strong>te lente<br />
scontate pari a σ p0 = 1000 MPa, mentre le per<strong>di</strong>te per attrito in rettilineo vengono valutate assumendo<br />
un coefficiente <strong>di</strong> attrito µ = 0.3 ed una curvatura non intenzionale dei cavi k = 0.0016.<br />
Allo scopo <strong>di</strong> in<strong>di</strong>viduare un adeguata <strong>di</strong>scretizzazione per la pila, in questo paragrafo verrà<br />
analizzata in campo elastico lineare senza armatura, senza precompressione e senza il vincolo sugli<br />
spostamenti relativi della sommità delle lame. Inoltre non viene considerato il carico verticale dovuto<br />
all’azione esercitata dal ponte sovrastante, bensì un carico orizzontale pari a 18 MN su ciascuna lama.<br />
Sotto queste ipotesi la pila si comporta come una mensola <strong>di</strong> sezione variabile, <strong>di</strong> cui si può<br />
ragionevolmente conoscere il comportamento tramite la teoria delle travi (De Saint Venant e<br />
Timoshenko). Analizzando più modelli si potrà perciò in<strong>di</strong>viduare il grado <strong>di</strong> <strong>di</strong>scretizzazione. Come<br />
suggerito in [Coc] si può utilizzare come in<strong>di</strong>catore la tensione alla Von Mises. Questa infatti <strong>di</strong>pende<br />
dalle tensioni in tutte le <strong>di</strong>rezioni, ed un buon modello deve fornirne una variazione non brusca tra i<br />
vari elementi. Per semplicità in questo lavoro, si esaminerà l’accuratezza della <strong>di</strong>scretizzazione<br />
solamente considerando lo spostamento in sommità della mensola.<br />
Una prima approssimazione dello spostamento <strong>di</strong> sommità è ottenibile dalla teoria delle travi alla De<br />
Saint Venant:<br />
36 MN 36 MN<br />
21.25 m<br />
36 MN<br />
hp = 21.25 m<br />
765 MNm<br />
Figura 5.39: Schema risolutivo per la teoria delle travi.<br />
Lo spostamento in sommità risulta pari a:<br />
f<br />
3<br />
2<br />
2<br />
3<br />
3<br />
P ⋅ L M ⋅ L M ⋅ L P ⋅ L P ⋅ L<br />
= + + + +<br />
3 ⋅ E ⋅ I 2 ⋅ E ⋅ I E ⋅ I 2 ⋅ E ⋅ I 3 ⋅ E ⋅ I<br />
1<br />
1<br />
1<br />
1<br />
2<br />
111
Applicazioni in campo elastico lineare Cap. 4<br />
Equazione che contempla sia gli spostamenti per flessione sia i moti rigi<strong>di</strong> della parte superiore<br />
dovuti alla flessione della parte inferiore.<br />
I = 143 m<br />
1<br />
. 2<br />
4<br />
I<br />
2<br />
= 95.<br />
11 m<br />
4<br />
I 1 è il momento d’inerzia della parte inferiore, I 2 è il momento d’inerzia della parte superiore. I<br />
moenti d’inerzia calcolati sono riferiti alla sezione <strong>di</strong>cretizzata <strong>di</strong> figura 5.42. Si ottiene una freccia<br />
pari a f = 0.22799 m.<br />
Volendo tenere in conto anche il contributo della deformazione tagliante, si esegue un’analisi col<br />
co<strong>di</strong>ce <strong>di</strong> calcolo TELAIO sviluppato dagli allievi Sgambi e Gomez durante il primo anno alla Scuola<br />
<strong>di</strong> <strong>Specializzazion</strong>e “F.lli Pesenti”. Il fattore <strong>di</strong> taglio (1/k) viene assunto pari a (Journal of Applied<br />
Mechanics) :<br />
10 ⋅ (1 + ν ) 5<br />
k = = per la parte superiore.<br />
12 + 11⋅ν<br />
6<br />
k =<br />
(12+<br />
72⋅m+<br />
150⋅m<br />
2<br />
+ 90⋅m<br />
3<br />
10 ⋅(1+<br />
ν ) ⋅(1+<br />
3⋅m)<br />
) + ν⋅(11+<br />
66⋅m+<br />
135⋅m<br />
2<br />
2<br />
+ 90⋅m<br />
3<br />
) + 10⋅n<br />
2<br />
⋅((3+<br />
ν ) ⋅m+<br />
3⋅m<br />
2<br />
= 0.2232<br />
)<br />
dove<br />
m<br />
b⋅t<br />
h ⋅ t<br />
h<br />
= ed<br />
b<br />
b<br />
n= con b = base escluso lo spessore delle pareti, h = altezza. Nei calcoli <strong>di</strong> k si è<br />
h<br />
posto ν = 0. Risulta:<br />
Senza la deformazione tagliante<br />
Con la deformazione tagliante<br />
f = 0.2240 m<br />
f = 0.2353 m<br />
Questi valori verranno utilizzati per stabilire l’accuratezza del modello <strong>di</strong>screto adottato per la pila. In<br />
prima analisi vengono analizzati i modelli raffigurati nella pagina seguente.<br />
112
Applicazioni in campo elastico lineare Cap. 4<br />
Figura 5.40: Modelli 1 - 2 - 3.<br />
Figura 5.41: Modelli 4 - 5 - 6.<br />
113
Applicazioni in campo elastico lineare Cap. 4<br />
La sezione viene <strong>di</strong>scretizzata come in figura 5.42. Da notare che si è scelto <strong>di</strong> non seguire la<br />
sagomatura originale che prevedeva l’introduzione <strong>di</strong> elementi con una <strong>di</strong>mensione <strong>di</strong> 20 cm e <strong>di</strong> altri<br />
elementi <strong>di</strong>storti. Questo porterà certamente ad un errore <strong>di</strong> <strong>di</strong>scretizzazione non facilmente valutabile<br />
in campo non lineare.<br />
450<br />
130<br />
Errore <strong>di</strong> <strong>di</strong>scretizzazione<br />
80<br />
Vincoli <strong>di</strong> simmetria<br />
per riflessione<br />
60<br />
600<br />
760<br />
Figura 5.42: Discretizzazione della sezione trasversale (<strong>di</strong>mensioni in cm).<br />
Risultano però valide le ragioni che hanno portato a tale scelta. L’introduzione <strong>di</strong> elementi <strong>di</strong><br />
<strong>di</strong>mensione pari a 20 cm (molto inferiore ai 60 cm dell’elemento più piccolo) avrebbe portato o ad<br />
una mesh con un brusco cambio <strong>di</strong> <strong>di</strong>mensione (e quin<strong>di</strong> soluzione poco accurata [Coo]) oppure ad<br />
un infittimento molto spinto della <strong>di</strong>scretizzazione con conseguente richiesta <strong>di</strong> risorse e tempo<br />
macchina non sod<strong>di</strong>sfacibili.<br />
Da notare infine che in tutti i modelli si è sfruttato il vincolo <strong>di</strong> simmetria per riflessione, ciò a dato la<br />
possibilità <strong>di</strong> utilizzare mesh con una <strong>di</strong>scretizzazione spinta lungo l’asse <strong>di</strong> flessione, senza superare<br />
i 2000 gra<strong>di</strong> <strong>di</strong> libertà e con una semibanda pari a 106 (questo per la particolare numerazione adottata,<br />
<strong>di</strong>pende solo dalla <strong>di</strong>scretizzazione della sezione).<br />
Come si vede dalla curva <strong>di</strong> convergenza riportata nella pagina successiva, la risposta in campo<br />
lineare è molto buona e già il modello 3 da una freccia pari a quella calcolabile col modello <strong>di</strong> trave<br />
alla Timoshenko.<br />
114
Applicazioni in campo elastico lineare Cap. 4<br />
0.25<br />
Elementi incompatibili<br />
0.24<br />
0.2363 0.2369<br />
0.2380<br />
0.23<br />
0.2320<br />
0.2351<br />
Timoshenko<br />
0.22<br />
De Saint Venant<br />
0.2286<br />
0.2182<br />
Freccia (m)<br />
0.21<br />
0.2<br />
0.2055<br />
0.19<br />
0.1913<br />
Elementi compatibili<br />
0.18<br />
0.17<br />
0.1659<br />
0.16<br />
0 200 400 600 800 1000 1200 1400 1600<br />
Gra<strong>di</strong> <strong>di</strong> Liberta'<br />
Figura 5.43: Curva <strong>di</strong> convergenza dei modelli 1-6.<br />
L’analisi in campo non lineare richiede una <strong>di</strong>scretizzazione sicuramente più fitta <strong>di</strong> quella richiesta<br />
per un’analisi lineare. Il danneggiamento della parti <strong>di</strong> struttura porta all’aumento del gra<strong>di</strong>ente delle<br />
tensioni in altre parti, per cui è bene non utilizzare mesh troppo rade. Un infittimento della mesh può<br />
essere utile in zone particolari come all’incastro della pila o nel punto in cui la sezione <strong>di</strong>venta binata.<br />
Verranno ulteriormente analizzati i modelli 4 e 6 infittendo la mesh nelle zone sopra citate (entrambi<br />
i modelli sono raffinati aggiungendo 6 piani <strong>di</strong> coor<strong>di</strong>nate nodali). In particolare verrà costruito un<br />
modello (denominato /tris) che abbia una variazione graduale nell’infittimento della mesh.<br />
Come evidenziano i risultati riportati nelle due pagine seguenti, in campo lineare le <strong>di</strong>fferenze tra i<br />
modelli non sono molto accentuate, questo perché si è già ad un risultato sostanzialmente corretto (in<br />
termini <strong>di</strong> freccia) anche col modello 4 (il modello 6/tris da una <strong>di</strong>fferenza del 1% rispetto al modello<br />
4). Anche se il miglioramento risulta quasi inconsistente, il modello con un infittimento graduale<br />
della mesh possiede un comportamento migliore.<br />
115
Applicazioni in campo elastico lineare Cap. 4<br />
Figura 5.44: Modelli 4, 4/bis, 4/tris.<br />
0.238<br />
Mod. 4 / tris<br />
0.2377<br />
0.2375<br />
0.2376<br />
Mod. 4 / bis<br />
Freccia (m)<br />
0.237<br />
0.2365<br />
Mod. 4<br />
0.2363<br />
0.236<br />
0.2355<br />
600 700 800 900 1000 1100 1200<br />
Gra<strong>di</strong> <strong>di</strong> Liberta'<br />
Figura 5.45: Convergenza dei modelli 4, 4/bis e 4/tris.<br />
116
Applicazioni in campo elastico lineare Cap. 4<br />
Figura 5.46: Modelli 6, 6/bis e 6/tris.<br />
0.239<br />
0.2385<br />
Mod. 6 / tris<br />
0.2383<br />
0.238<br />
Mod. 6<br />
0.2380<br />
0.2383<br />
Mod. 6 / bis<br />
Freccia (m)<br />
0.2375<br />
0.237<br />
0.2365<br />
1500 1600 1700 1800 1900 2000 2100<br />
Gra<strong>di</strong> <strong>di</strong> Liberta'<br />
Figura 5.47: Convergenza dei modelli 6, 6/bis e 6/tris.<br />
117
Applicazioni in campo elastico non lineare Cap. 5<br />
Capitolo 5<br />
Applicazioni in campo elastico non lineare<br />
In<strong>di</strong>ce riassuntivo delle applicazioni riportate<br />
- Prove <strong>di</strong> compressione monoassiale.<br />
- Dominio <strong>di</strong> rottura <strong>di</strong> Kupfer.<br />
- Dominio <strong>di</strong> rottura <strong>di</strong> Bresler – Pister.<br />
- Pannello soggetto a stato <strong>di</strong> sforzo <strong>di</strong> puro taglio.<br />
- Trave <strong>di</strong> Bresler - Scordelis.<br />
- Analisi <strong>di</strong> una pila da ponte a profilo misto in campo non lineare.<br />
Tutte le applicazioni riportate in questo capitolo sono state eseguite con il co<strong>di</strong>ce <strong>di</strong> calcolo operante<br />
con le funzioni <strong>di</strong> forma non compatibili alla Wilson. Le prove <strong>di</strong> compressione ed i domini <strong>di</strong><br />
Kupfer e <strong>di</strong> Bresler-Pister sono stati ricavati sia con il legame a danneggiamento isotropo, sia con il<br />
legame ortotropo.<br />
118
Applicazioni in campo elastico non lineare Cap. 5<br />
1. Prove <strong>di</strong> compressione monoassiale<br />
Le applicazioni degli esempi 1, 2, 3, e 4 vengono eseguite sui modelli geometrici già analizzati nel<br />
capitolo precedente. Per il calcestruzzo si assume un modello geometrico formato da 8 elementi che<br />
assemblati tra loro forniscono un cubo <strong>di</strong> lato 2. La mesh è <strong>di</strong>storta in quanto il punto centrale non ha<br />
coor<strong>di</strong>nate 0, 0, 0, ma 0.2, 0.1, 0.3. La struttura viene vincolata come in Figura 5.1:<br />
z<br />
y<br />
Faccia vincolata in X<br />
Faccia con ce<strong>di</strong>menti<br />
unitari<br />
x<br />
Faccia vincolata in Y<br />
Faccia vincolata in Z<br />
Figura 5.1: Vincoli assunti nella prova <strong>di</strong> compressione uniassiale.<br />
Avendo vincolato solamente 3 facce in <strong>di</strong>rezione ad esse normali, l’elemento risulta libero <strong>di</strong><br />
deformarsi per effetto Poisson. La prova viene effettuata a ce<strong>di</strong>menti imposti, in modo da cogliere<br />
anche il ramo softening della risposta. In questo esempio si vuole confrontare la risposta del legame a<br />
danneggiamento isotropo proposto con 3 delle curve σ - ε presenti nel Model Code 90 per il<br />
calcestruzzo compresso. I materiali utilizzati sono:<br />
f c = 27 MPa Ec = 28500 MPa ε e = 0.00028 ε m = 0.0022 ε u = 0.0070<br />
f c = 39 MPa Ec = 32216 MPa ε e = 0.00036 ε m = 0.0022 ε u = 0.0060<br />
f c = 48 MPa Ec = 34525 MPa ε e = 0.00042 ε m = 0.0022 ε u = 0.0055<br />
119
Applicazioni in campo elastico non lineare Cap. 5<br />
Il valore <strong>di</strong> ε e viene ricavato per ogni materiale in base alle sperimentazioni eseguite da [KoN] che<br />
in<strong>di</strong>carono col valore <strong>di</strong> σ = 0.3 x f c il valore limite della fase elastica. Il valore <strong>di</strong> ε m viene mantenuto<br />
pari al 2.2 per mille, essendo questo valore quasi in<strong>di</strong>pendente dal valore della resistenza f c . La<br />
grandezza ε u viene invece mo<strong>di</strong>ficata per tentativi per cogliere la giusta inclinazione del ramo <strong>di</strong><br />
softening del calcestruzzo. I calcestruzzi a più elevata resistenza presentano infatti una pendenza più<br />
accentuata, e delle deformazioni ultime minori.<br />
60<br />
50<br />
Curva Calcolata<br />
Tensione <strong>di</strong> compressione (MPa)<br />
40<br />
30<br />
20<br />
fc = 27 MPa<br />
fc = 48 MPa<br />
fc = 39 MPa<br />
Curva <strong>di</strong><br />
Riferimento<br />
10<br />
0<br />
0 0.001 0.002 0.003 0.004 0.005 0.006<br />
Deformazione <strong>di</strong> compressione<br />
Figura 5.2: Curve sforzo - deformazione nel caso della compressione uniassiale.<br />
Il modello <strong>di</strong> danno proposto coglie molto bene il primo tratto della curva (tratto ascendente) ed in<br />
modo sufficientemente approssimato il tratto <strong>di</strong> softening (tratto <strong>di</strong>scendente). I parametri della legge<br />
<strong>di</strong> evoluzione del danno verranno tarati sulla base della risposta a compressione, la risposta del<br />
modello ad altri tipi <strong>di</strong> sollecitazione viene riportata nelle pagine seguenti.<br />
120
Applicazioni in campo elastico non lineare Cap. 5<br />
Per questo primo esempio si riportano inoltre i valori delle tensioni in un passo interme<strong>di</strong>o, nonché i<br />
valori della variabile <strong>di</strong> danneggiamento nei vari elementi. Vengono riportati i risultati relativi alla<br />
curva con f c = 48.<br />
Le tensioni al passo 30 (ce<strong>di</strong>mento pari a –0.006) sono (in un generico elemento):<br />
PT G SIGMA X SIGMA Y SIGMA Z TAU XY TAU YZ TAU XZ<br />
1 -.4217E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
2 -.4217E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
***<br />
9 -.4217E+02 .0000E+00 .0000E+00 .0000E+00 .0000E+00 .0000E+00<br />
Mentre il danneggiamento vale:<br />
Elem. 1<br />
Elem. 2<br />
Elem. k<br />
DG1<br />
.593E+00<br />
.593E+00<br />
.593E+00<br />
DG2<br />
.593E+00<br />
.593E+00<br />
.593E+00<br />
DG3<br />
.593E+00<br />
.593E+00<br />
.593E+00<br />
DG4<br />
.593E+00<br />
.593E+00<br />
.593E+00<br />
DG5<br />
.593E+00<br />
.593E+00<br />
.593E+00<br />
DG6<br />
.593E+00<br />
.593E+00<br />
.593E+00<br />
DG7<br />
.593E+00<br />
.593E+00<br />
.593E+00<br />
DG8<br />
.593E+00<br />
.593E+00<br />
.593E+00<br />
DG9<br />
.593E+00<br />
.593E+00<br />
.593E+00<br />
Lo spostamento del nodo centrale, <strong>di</strong> coor<strong>di</strong>nate 0.2, 0.1, 0.3, vale:<br />
u = -3.600000000000000E-003<br />
v = -1.671559930473855E-016<br />
z = 2.175898210753022E-016<br />
Come è possibile notare dai risultati sopra riportati, il danno è costante in tutti gli elementi, in quanto<br />
la mesh (anche se è <strong>di</strong>storta) è soggetta ad un campo <strong>di</strong> spostamenti che provoca una tensione<br />
uniforme in tutti gli elementi. Lo spostamento del nodo centrale non è influenzato dal valore del<br />
danno negli elementi, in quanto questo risulta uniforme. Lo spostamento corretto si può sempre<br />
calcolare come:<br />
1.2<br />
u = 0 .006⋅<br />
= 0.0036<br />
2<br />
121
Applicazioni in campo elastico non lineare Cap. 5<br />
2. Dominio <strong>di</strong> rottura <strong>di</strong> Kupfer<br />
In questo esempio si vuole ricostruire il dominio <strong>di</strong> rottura del calcestruzzo sottoposto ad un campo si<br />
sforzi normali biassiali. La curva <strong>di</strong> riferimento è quella sperimentale, ottenuta da Kupfer e Gerstle<br />
nel 1973 [KuG]. Le equazioni interpolanti il dominio <strong>di</strong> rottura sono:<br />
σ<br />
2<br />
= f<br />
tu<br />
= 64 (per il campo trazione – trazione) (5.1)<br />
3 2<br />
0.<br />
⋅ f<br />
cu<br />
σ<br />
2<br />
σ<br />
1<br />
= 1+<br />
0.8⋅<br />
(per il campo trazione – compressione)<br />
f tu<br />
f cu<br />
⎛ σ<br />
1<br />
σ<br />
2<br />
⎜ +<br />
⎝ f<br />
cu<br />
f<br />
cu<br />
2<br />
⎞ σ<br />
1<br />
σ<br />
2<br />
⎟ + + 3.65⋅<br />
⎠ f<br />
cu<br />
f<br />
cu<br />
= 0<br />
(per il campo delle compressioni – compressioni)<br />
Oltre al dominio <strong>di</strong> rottura si controlleranno anche le curve σ − ε per i casi in cui sono note le curve<br />
sperimentali. L’analisi viene sempre condotta sulla mesh descritta nell’esempio 1 (mesh <strong>di</strong>storta).<br />
Come leggi costitutive in campo non lineare si utilizza sia il modello a danno isotropo proposto, sia il<br />
legame ortotropo in modo da poter confrontare le soluzioni ottenute coi due legami.<br />
122
Applicazioni in campo elastico non lineare Cap. 5<br />
0.2<br />
σ1 / fcu<br />
0<br />
-1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2<br />
-0.2<br />
-0.4<br />
Calcolato<br />
Sperimentale<br />
-0.6<br />
-0.8<br />
-1<br />
-1.2<br />
2 / fcu<br />
-1.4<br />
Figura 5.3: Confronto tra il dominio <strong>di</strong> Kupfer ed il dominio <strong>di</strong> rottura calcolato (Modello a Danno Isotropo)<br />
σ1 / fcu<br />
3<br />
0.2<br />
2<br />
0<br />
-1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2<br />
-0.2<br />
-0.4<br />
Sperimentale<br />
Calcolato<br />
-0.6<br />
1<br />
-0.8<br />
-1<br />
-1.2<br />
σ2 / fcu<br />
-1.4<br />
Figura 5.4 : Confronto tra il dominio <strong>di</strong> Kupfer ed il dominio <strong>di</strong> rottura calcolato (Modello a Danno Ortotropo)<br />
123
Applicazioni in campo elastico non lineare Cap. 5<br />
Dai grafici seguenti si può notare che anche la correzione apportata al campo delle compressione –<br />
trazione, nel modello a danno isotropo fornisce risultati ottimi (senza <strong>di</strong> essa l’errore rispetto alle<br />
curve σ − ε sarebbe del 50 %). I risultati ottenuti tramite il modello ortotropo sono invece più<br />
approssimativi, specialmente nel campo compressione – compressione. Il <strong>di</strong>agramma risultante è<br />
approssimativamente <strong>di</strong> tipo quadrato, con gli spigoli smussati nel campo della trazione<br />
compressione. Questo smusso si verifica per l’assunzione del parametro <strong>di</strong> softening ζ (ve<strong>di</strong> pag. 58)<br />
che riduce la resistenza a compressione in presenza <strong>di</strong> trazione in altre <strong>di</strong>rezioni principali.<br />
La figura quadrata del <strong>di</strong>agramma risultante trova giustificazione nell’ipotesi <strong>di</strong> avere assunto un<br />
coefficiente <strong>di</strong> Poisson nullo. In questo esempio le <strong>di</strong>rezioni <strong>di</strong> carico sono infatti anche <strong>di</strong>rezioni<br />
principali (lungo le <strong>di</strong>rezioni principali si valutano i legami costitutivi) e quin<strong>di</strong> la matrice <strong>di</strong><br />
rotazione risulta unitaria. La risposta lungo la <strong>di</strong>rezione X risulta perciò <strong>di</strong>saccoppiata dalla risposta<br />
in <strong>di</strong>rezione Y, il problema si riduce a:<br />
⎡σ<br />
x ⎤ ⎡E1<br />
⎢ ⎥<br />
=<br />
⎢<br />
⎢<br />
σ<br />
y<br />
⎥ ⎢<br />
0<br />
⎢⎣<br />
0 ⎥⎦<br />
⎢⎣<br />
0<br />
0<br />
E<br />
0<br />
2<br />
0 ⎤ ⎡ ε<br />
x<br />
⎤<br />
⎢ ⎥<br />
0<br />
⎥<br />
⎥<br />
⋅⎢ε<br />
y ⎥<br />
G⎥⎦<br />
⎢ ⎥<br />
⎣γ<br />
xy ⎦<br />
(5.2)<br />
Le tensioni che forniscono il carico ultimo risulteranno quin<strong>di</strong> pari a σ = f σ ≥ f nel campo delle<br />
i<br />
c<br />
j<br />
c<br />
bicompressioni (dando luogo alla zona 1 del <strong>di</strong>agramma <strong>di</strong> Kupfer, fig. 5.4) e<br />
σ = f σ ≤ f nel<br />
i<br />
t<br />
j<br />
t<br />
campo delle bitrazioni (dando luogo alla zona 2). Ad esempio nel campo delle bicompressioni<br />
risulterà σ = f σ ≥ f in tutti i casi in cui si è scelto un rapporto <strong>di</strong> carico σ / ≥1<br />
motivo per cui<br />
x<br />
c<br />
y<br />
c<br />
il tratto <strong>di</strong> <strong>di</strong>agramma corrispondente risulta retto. La zona 3 delle trazioni compressioni, risulta<br />
<strong>di</strong>visibile in altre 2 sottozone. Una zona più estesa dove il rapporto tra le tensioni <strong>di</strong> carico è tale da<br />
far giungere la crisi per σ = f σ ≥ f (tratto orizzontale del <strong>di</strong>agramma) ed una zona meno estesa<br />
i<br />
t<br />
j<br />
c<br />
x<br />
σ y<br />
dove la crisi risulta con<br />
f / f del<br />
σ<br />
i<br />
= fc<br />
σ<br />
j<br />
≤ ft<br />
. La lunghezza <strong>di</strong> tali zone <strong>di</strong>pende dal rapporto<br />
c t<br />
calcestruzzo, in genere assunto pari a 10 o 12 (Il tratto orizzontale è 10 o 12 volte il tratto verticale).<br />
Da notare che il coefficiente <strong>di</strong> softened introdotto a pag. 59 con lo scopo <strong>di</strong> abbassare la resistenza a<br />
compressione nel caso fossero presenti delle trazioni trasversali, influisce sulla resistenza ultima<br />
124
Applicazioni in campo elastico non lineare Cap. 5<br />
solamente per il tratto verticale della zona 3 e per un brevissimo tratto orizzontale, causando uno<br />
smusso del <strong>di</strong>agramma <strong>di</strong> Kupfer. Per la restante zona 3 <strong>di</strong>fatti, la crisi sopraggiunge sulla<br />
componente a trazione quando la componente <strong>di</strong> compressione risulta ancora inferiore alla resistenza<br />
massima <strong>di</strong>minuita dall’effetto softened.<br />
Effetto softened<br />
0.2<br />
σ1 / fcu<br />
0<br />
-1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0<br />
Figura 5.5: Effetto Softened sulla resistenza ultima a compressione trazione.<br />
La zona interessata dall’effetto softened risulterà tanto maggiore quanto il rapporto<br />
f / f si avvicina<br />
c<br />
t<br />
ad 1. Per un calcestruzzo in cui la resistenza a trazione risulta circa un decimo <strong>di</strong> quella a<br />
compressione, l’effetto softened risulta circoscritto ad una piccola zona del <strong>di</strong>agramma delle trazioni<br />
compressioni. Si riportano <strong>di</strong> seguito le curve σ − ε ottenute, sovrapposte a quelle sperimentali. I casi<br />
riportati sono:<br />
- compressione biassiale -1 : -1 : 0<br />
- compressione biassiale -1 : -0.52 : 0<br />
- compressione trazione -1 : 0.102 : 0<br />
- compressione trazione -1 : -0.204 : 0<br />
Si noti che per le ε 2 ed ε 3 nel caso della compressione monoassiale e per la sola ε 3 per il caso della<br />
compressione biassiale, la curva sperimentale presenta quasi un plateau orizzontale che il non si<br />
riesce a cogliere. Ciò è dovuto al fenomeno della <strong>di</strong>latanza, ovvero all’aumento della deformazione<br />
trasversale (dovuta al solo effetto Poisson a provino integro) quando ci si avvicina alla resistenza<br />
massima. Il modello ortotropo assume un coefficiente ν post - fessurazione nullo, per cui nei relativi<br />
grafici mancheranno le curve tensione – deformazione dovute all’effetto Poisson.<br />
125
Applicazioni in campo elastico non lineare Cap. 5<br />
1.6<br />
ε1 , ε2<br />
1.4<br />
1.2<br />
Tensione / fcm<br />
ε3<br />
1.0<br />
0.8<br />
Curva Calcolata<br />
Curva <strong>di</strong> Riferimento<br />
0.6<br />
0.4<br />
0.2<br />
0.0<br />
Deformazione<br />
-4.50E-03 -3.50E-03 -2.50E-03 -1.50E-03 -5.00E-04 5.00E-04 1.50E-03 2.50E-03 3.50E-03 4.50E-03 5.50E-03<br />
Figura 5.6: Compressione biassiale -1 : -1 : 0 (Modello Isotropo).<br />
1.6<br />
ε1<br />
ε2<br />
1.4<br />
1.2<br />
Tensione / fcm<br />
1.0<br />
ε3<br />
0.8<br />
0.6<br />
0.4<br />
Curva Calcolata<br />
Curva <strong>di</strong> Riferimento<br />
0.2<br />
Deformazione<br />
-4.00E-03 -3.00E-03 -2.00E-03 -1.00E-03 0.00E+00 1.00E-03 2.00E-03<br />
0.0<br />
Figura 5.7: Compressione biassiale -1 : -1 : 0 (Modello Ortotropo).<br />
126
Applicazioni in campo elastico non lineare Cap. 5<br />
1.6<br />
ε1<br />
ε2<br />
1.4<br />
1.2<br />
Tensione / fcm<br />
1.0<br />
ε3<br />
0.8<br />
0.6<br />
0.4<br />
Curva Calcolata<br />
Curva <strong>di</strong> Riferimento<br />
0.2<br />
Deformazione<br />
-4.00E-03 -3.00E-03 -2.00E-03 -1.00E-03 0.00E+00 1.00E-03 2.00E-03<br />
0.0<br />
Figura 5.8: Compressione biassiale -1 : -0.52 : 0 (Modello Isotropo).<br />
1.6<br />
ε1<br />
ε2<br />
1.4<br />
1.2<br />
Tensione / fcm<br />
1.0<br />
ε3<br />
0.8<br />
0.6<br />
0.4<br />
Curva Calcolata<br />
Curva <strong>di</strong> Riferimento<br />
0.2<br />
Deformazione<br />
-4.00E-03 -3.00E-03 -2.00E-03 -1.00E-03 0.00E+00 1.00E-03 2.00E-03<br />
0.0<br />
Figura 5.9: Compressione biassiale -1 : -0.52 : 0 (Modello Ortotropo).<br />
127
Applicazioni in campo elastico non lineare Cap. 5<br />
0.7<br />
ε1<br />
Tensione / fcm<br />
0.6<br />
0.5<br />
ε2<br />
ε3<br />
0.4<br />
Curva Calcolata<br />
0.3<br />
Curva <strong>di</strong> Riferimento<br />
0.2<br />
0.1<br />
Deformazione<br />
-0.002 -0.0015 -0.001 -0.0005 0 0.0005<br />
0<br />
Figura 5.10: Compressione - Trazione -1 : 0.103 : 0 (Modello Isotropo).<br />
0.7<br />
ε1<br />
ε2<br />
Tensione / fcm<br />
0.6<br />
0.5<br />
0.4<br />
ε3<br />
Curva Calcolata<br />
0.3<br />
Curva <strong>di</strong> Riferimento<br />
0.2<br />
0.1<br />
Deformazione<br />
-0.002 -0.0015 -0.001 -0.0005 0 0.0005<br />
0<br />
Figura 5.11: Compressione - Trazione -1 : 0.103 : 0 (Modello Ortotropo).<br />
128
Applicazioni in campo elastico non lineare Cap. 5<br />
0.4<br />
ε2<br />
ε1<br />
Tensione / fcm<br />
0.35<br />
0.3<br />
0.25<br />
ε3<br />
0.2<br />
Curva Calcolata<br />
Curva <strong>di</strong> Riferimento<br />
0.15<br />
0.1<br />
0.05<br />
Deformazione<br />
-0.0011 -0.0009 -0.0007 -0.0005 -0.0003 -0.0001 0.0001 0.0003 0.0005<br />
0<br />
Figura 5.12: Compressione - Trazione -1 : 0.202 : 0 (Modello Isotropo).<br />
0.4<br />
ε2<br />
ε1<br />
Tensione / fcm<br />
0.35<br />
0.3<br />
ε3<br />
0.25<br />
0.2<br />
0.15<br />
0.1<br />
Curva Calcolata<br />
0.05<br />
Curva <strong>di</strong> Riferimento<br />
Deformazione<br />
0<br />
-0.0005 -0.0004 -0.0003 -0.0002 -0.0001 0 0.0001 0.0002 0.0003 0.0004 0.0005<br />
Figura 5.13: Compressione - Trazione -1 : 0.202 : 0 (Modello Ortotropo).<br />
129
Applicazioni in campo elastico non lineare Cap. 5<br />
3. Dominio <strong>di</strong> rottura <strong>di</strong> Bresler – Pister.<br />
In questo esempio si vogliono riprodurre i risultati sperimentali ottenuti da Bresler e Pister nel 1958<br />
per il caso <strong>di</strong> calcestruzzi sottoposti a sforzi <strong>di</strong> compressione – taglio, trazione – taglio [BrP]. Per<br />
l’esecuzione delle prove sperimentali sono stati utilizzati provini tubolari <strong>di</strong> <strong>di</strong>ametro esterno <strong>di</strong> 23<br />
cm, <strong>di</strong>ametro interno <strong>di</strong> 15 cm e lunghi 76 cm, con 3 <strong>di</strong>versi valori <strong>di</strong> resistenza a compressione.<br />
Un’approssimazione del dominio <strong>di</strong> rottura può essere ottenuta col criterio <strong>di</strong> Mohr, (o della curva<br />
intrinseca) adatto per i materiali fragili.<br />
(a)<br />
(b)<br />
Figura 14: Cerchi <strong>di</strong> Mohr. (a) Cerchio (σ 1 -σ 3 ): con<strong>di</strong>zioni <strong>di</strong> rottura <strong>di</strong> uno stato <strong>di</strong> tensione tri<strong>di</strong>mensionale. Cerchio (0-<br />
σ cr ): con<strong>di</strong>zioni <strong>di</strong> rottura a compressione semplice. Cerchio (σ crt -0): con<strong>di</strong>zioni <strong>di</strong> rottura <strong>di</strong> trazione semplice. (b)<br />
Relazione trastato <strong>di</strong> <strong>di</strong> sforzo σ-τ e sforzi principali.<br />
Impostando la proporzione B 3 K/B 1 L=B 2 B 3 /B 2 B 1 e sostituendo l’espressione degli sforzi principali, si<br />
ottiene l’espressione analitica della con<strong>di</strong>zione <strong>di</strong> rottura:<br />
2<br />
1 2 2 2<br />
σ − ( 1−<br />
ρ)<br />
⋅σ<br />
⋅σ<br />
cr<br />
+ ρ⋅(1+<br />
) ⋅τ<br />
= ρ⋅σ<br />
cr<br />
(5.2)<br />
ρ<br />
dove ρ=f ctm /f cm .<br />
130
Applicazioni in campo elastico non lineare Cap. 5<br />
Si riportano si riportano i risultati dell’analisi numerica eseguita sia col modello a danno isotropo sia<br />
col modello a danno ortotropo, il dominio <strong>di</strong> rottura sperimentale ed il dominio <strong>di</strong> rottura derivante<br />
dal criterio <strong>di</strong> Mohr. Si noti che i risultati sperimentali sono compresi tra le due linee tratteggiate. La<br />
<strong>di</strong>fficoltà dell’esecuzione <strong>di</strong> questo tipo <strong>di</strong> prova e l’uso <strong>di</strong> calcestruzzi <strong>di</strong> <strong>di</strong>versa resistenza, ha infatti<br />
portato ad una notevole <strong>di</strong>spersione dei risultati. Il modello a danno fornisce comunque dei buoni<br />
risultati, approssimando molto bene i risultati sperimentali nel campo della compressione – taglio e<br />
sovrastimando leggermente la resistenza nel campo della trazione – taglio. Il modello ortotropo coglie<br />
comunque meglio la forma del dominio <strong>di</strong> rottura, anche se sovrastima leggermente la resistenza nel<br />
campo del taglio – compressione.<br />
0.300<br />
0.250<br />
Dispersione Sperimentale<br />
Dispersione Sperimentale<br />
Mohr<br />
Modello isotropo<br />
Modello isotropo<br />
τ / fcu<br />
0.200<br />
0.150<br />
0.100<br />
0.050<br />
σ / fcu<br />
0.000<br />
-0.200 0.000 0.200 0.400 0.600 0.800 1.000 1.200<br />
Figura 5.15: Confronto tra i domini <strong>di</strong> Bresler – Pister ed il dominio <strong>di</strong> rottura calcolato.<br />
131
Applicazioni in campo elastico non lineare Cap. 5<br />
4. Pannello soggetto a taglio puro<br />
Si vuole riprodurre il comportamento a taglio puro <strong>di</strong> un pannello in calcestruzzo armato. Il pannello<br />
scelto fa parte <strong>di</strong> una serie <strong>di</strong> pannelli testati sperimentalmente da Vecchio, Collins e Melhorn (1985)<br />
per una competizione internazionale sulla pre<strong>di</strong>zione della risposta strutturale <strong>di</strong> pannelli in C.A. Di<br />
seguito si riportano i dati <strong>di</strong> alcuni dei pannelli testati.<br />
Caratteristiche geometriche dei pannelli [MPa]<br />
Pannello<br />
Sperime<br />
ntazione<br />
angolo<br />
armature<br />
si no α2 [°] ρ<br />
l<br />
Armature<br />
Longitu<strong>di</strong>nali Trasversali<br />
'<br />
ε<br />
f<br />
ly<br />
ρ<br />
t<br />
f<br />
ty<br />
Calcestruzzo<br />
PV10 X 90 0.0179 276 0.0100 276 0.00270 14.5<br />
PV11 X 90 0.0179 235 0.0131 235 0.00260 15.6<br />
PV12 X 90 0.0179 469 0.0045 269 0.00250 16.0<br />
PV18 X 90 0.0179 431 0.0032 412 0.00220 19.5<br />
PV19 X 90 0.0179 458 0.0071 299 0.00220 19.0<br />
PV20 X 90 0.0179 460 0.0089 297 0.0018 19.6<br />
c<br />
'<br />
f<br />
c<br />
Caratteristiche del materiale (E s = 200000 MPa) [MPa]<br />
Pannello<br />
E<br />
Teoria MCFT<br />
Teoria STM<br />
' '<br />
'<br />
c<br />
= 2 f c<br />
/ ε<br />
c f<br />
cr<br />
= 0.33<br />
f<br />
c<br />
'<br />
E<br />
c<br />
= 3875 f<br />
c<br />
PV10 10740.7 1.26 14755.6 1.18<br />
PV11 12000.0 1.30 15305.0 1.22<br />
PV12 12800.0 1.32 15500.0 1.24<br />
PV18 17727..3 1.46 17111.5 1.37<br />
PV19 17272.7 1.44 16890.7 1.35<br />
PV20 21777.8 1.46 17155.4 1.37<br />
f =<br />
cr<br />
'<br />
0.31<br />
f<br />
c<br />
Si è scelto <strong>di</strong> testare il solo pannello PV19, confrontando i risultati ottenuti sia con i risultati<br />
sperimentali, sia con i risultati ottenuti dall’ing. Gomez utilizzando le stesse leggi costitutive<br />
(ortotrope) assunte in questo lavoro, con un co<strong>di</strong>ce <strong>di</strong> calcolo non ad Elementi Finiti.<br />
132
Applicazioni in campo elastico non lineare Cap. 5<br />
Si noti la perfetta corrispondenza con i risultati ottenuti dall’ing. Gomez, nonché la buona<br />
approssimazione ai risultati reali.<br />
4.5<br />
4<br />
Sperimentale<br />
3.5<br />
3<br />
<strong>Tesi</strong> ing. Gomez<br />
Tensione τ (MPa)<br />
2.5<br />
2<br />
<strong>Tesi</strong> ing. Sgambi (modello ortotropo)<br />
1.5<br />
1<br />
0.5<br />
0<br />
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01<br />
Deformazione γ<br />
Figura 5.15: Curva γ - τ per il pannello PV19.<br />
L’utilizzo <strong>di</strong> un legame isotropo porterebbe in questo caso ad una resistenza ultima pari alla<br />
resistenza <strong>di</strong> fessurazione, con una tensione nulla nelle barre <strong>di</strong> armatura. Un modello isotropo non è<br />
quin<strong>di</strong> in grado <strong>di</strong> rappresentare il comportamento <strong>di</strong> una membrana in calcestruzzo armato quando<br />
siano presenti sforzi <strong>di</strong> taglio rilevanti. Questo appare chiaro se consideriamo il sistema che governa<br />
la risposta del modello isotropo in caso <strong>di</strong> stato <strong>di</strong> sforzo piano <strong>di</strong> taglio puro:<br />
⎡ 0 ⎤ ⎡D<br />
⎢ ⎥<br />
=<br />
⎢<br />
⎢ 0 ⎥ ⎢<br />
D<br />
⎢ ⎥<br />
⎣τ<br />
⎦<br />
⎢<br />
xy ⎣ 0<br />
11<br />
21<br />
D<br />
D<br />
12<br />
0<br />
22<br />
0 ⎤ ⎡ ε<br />
x<br />
⎤<br />
⎢ ⎥<br />
0<br />
⎥<br />
⎥<br />
⋅(1−<br />
d)<br />
⋅⎢ε<br />
y ⎥<br />
D ⎥⎦<br />
⎢ ⎥<br />
33 ⎣γ<br />
xy ⎦<br />
(5.3)<br />
dove d in<strong>di</strong>ca il danneggiamento del materiale.<br />
133
Applicazioni in campo elastico non lineare Cap. 5<br />
La matrice <strong>di</strong> rigi<strong>di</strong>tà del materiale possiede sempre la forma data nella 5.3, con degli zeri in<br />
posizione (1,3) (2,3) (3,1) e (3,2) che provocano il <strong>di</strong>saccoppiamento delle equazioni che governano<br />
la risposta a taglio da quelle che governano la risposta alle azioni normali. Si hanno perciò i seguenti<br />
2 sistemi:<br />
⎡0⎤<br />
⎡<br />
⎥ = D<br />
⎢ ⎢<br />
⎣0⎦<br />
⎣D<br />
11<br />
21<br />
D<br />
D<br />
21<br />
22<br />
⎤ ⎡ ⎤<br />
⎥ ⋅ ε<br />
x<br />
(1−<br />
d)<br />
⋅⎢<br />
⎥<br />
⎦ ⎣ε<br />
y ⎦<br />
(sistema che governa la risposta ad azioni normali) (5.4)<br />
τ = D33 ⋅(1−<br />
d)<br />
⋅γ<br />
(sistema che governa la risposta ad azioni <strong>di</strong> taglio) (5.5)<br />
xy<br />
xy<br />
dato che la matrice <strong>di</strong> rigi<strong>di</strong>tà presente nella (5.4) possiede rango 2 (se così non fosse sarebbe il<br />
modulo E del calcestruzzo pari a 0) il sistema (5.4) ammette come unica soluzione la soluzione nulla<br />
x<br />
=<br />
y<br />
ε 0 ε =0 con conseguente errato inutilizzo delle armature poste in <strong>di</strong>rezione X e Y.<br />
La risposta strutturale risulta perciò governata dalla sola equazione (5.5) che fornisce come resistenza<br />
ultima del pannello, la resistenza a taglio del solo calcestruzzo.<br />
Col modello ortotropo, nel momento in cui la matrice <strong>di</strong>agonale delle rigi<strong>di</strong>tà nel sistema <strong>di</strong><br />
riferimento principale viene ruotata nel sistema <strong>di</strong> riferimento X,Y si trova un sistema con matrice dei<br />
coefficienti piena e <strong>di</strong> rango 3 (altrimenti si avrebbe una <strong>di</strong>rezione i in cui E i = 0 ma questo è escluso<br />
dalle leggi costitutive anche nel caso <strong>di</strong> trazione pura):<br />
⎡ 0 ⎤ ⎡D11<br />
D12<br />
D13<br />
⎤ ⎡ ε<br />
x<br />
⎤<br />
⎢ ⎥ ⎢<br />
⎥ ⎢ ⎥<br />
⎢ 0 ⎥=<br />
⎢<br />
D21<br />
D22<br />
D23<br />
⎥<br />
⋅⎢ε<br />
y ⎥<br />
⎢ ⎥ ⎢⎣<br />
⎥⎦<br />
⎢ ⎥<br />
⎣τ xy ⎦ D31<br />
D32<br />
D33<br />
⎣γ<br />
xy ⎦<br />
(5.6)<br />
essendo i coefficienti in posizione (1,3) (2,3) (3,1) e (3,2) non più nulli, una deformazione a taglio<br />
provoca anche delle deformazioni in <strong>di</strong>rezione X e Y che chiamano in causa le relative armature (se<br />
presenti). Nasceranno quin<strong>di</strong> delle tensioni <strong>di</strong> tipo σ in <strong>di</strong>rezioni X e Y, tuttavia le tensioni σ presenti<br />
nel calcestruzzo saranno equilibrate dagli sforzi presenti nell’armatura (se la membrana è soggetta a<br />
taglio puro le tensioni σ che nascono sono autoequilibrate all’interno della struttura).<br />
134
Applicazioni in campo elastico non lineare Cap. 5<br />
5. Trave <strong>di</strong> Bresler – Scordelis<br />
Si considera come primo esempio, due delle travi provate sperimentalmente da Bresler e Scordelis<br />
nel 1961, e precisamente la trave A-1 e la trave OA-1. La trave A-1 è caratterizzata da una forte<br />
armatura flessionale e da una debole armatura a taglio, in modo da raggiungere un collasso con un<br />
meccanismo <strong>di</strong> parete. La trave OA-1, rispetto alla A-1, è del tutto sprovvista <strong>di</strong> armatura trasversale<br />
e <strong>di</strong> armatura al positivo. In fig. 5.16 sono riportate le <strong>di</strong>mensioni, le <strong>di</strong>sposizioni <strong>di</strong> armatura e le<br />
caratteristiche dei materiali della trave A-1. La struttura è stata sud<strong>di</strong>visa in 297 elementi finiti, per un<br />
totale <strong>di</strong> 2040 gra<strong>di</strong> <strong>di</strong> libertà. Tuttavia, essendo la struttura sottoposta ad uno stato <strong>di</strong> sforzo piano, i<br />
gra<strong>di</strong> <strong>di</strong> libertà che effettivamente concorrono a rappresentare il modello sono solo 680. Tutte le<br />
armature presenti sono state assegnate in modo <strong>di</strong>ffuso, il carico <strong>di</strong> prova e le reazioni vincolari sono<br />
state ripartite nell’intorno del punto <strong>di</strong> applicazione, per evitare arbitrarie concentrazioni <strong>di</strong> sforzo.<br />
Figura 5.16: Geometria della trave <strong>di</strong> Bresler Scordelis con staffatura.<br />
135
Applicazioni in campo elastico non lineare Cap. 5<br />
500<br />
450<br />
400<br />
350<br />
Carico applicato (KN)<br />
300<br />
250<br />
200<br />
150<br />
Risultati sperimentali<br />
Elaborazione numerica<br />
100<br />
50<br />
0<br />
0 2 4 6 8 10 12 14 16<br />
Freccia massima (mm)<br />
Figura 5.17: Curva carico freccia, sperimentale e calcolato.<br />
L’elaborazione numerica con un legame costitutivo ortotropo fornisce una buona interpretazione del<br />
comportamento strutturale della trave. Nelle pagine seguenti vengono riportate le immagini <strong>di</strong><br />
fessurazione ricavate numericamente, da confrontare con il quadro fessurativo sperimentale riportato<br />
in fig. 5.18.<br />
Figura 5.18: Quadro fessurativo sperimentale sulle 2 facce della trave armata a taglio.<br />
136
Applicazioni in campo elastico non lineare Cap. 5<br />
Figura 5.19: Quadro fessurativo al 10% del carico ultimo.<br />
Figura 5.20: Quadro fessurativo al 40% del carico ultimo.<br />
137
Applicazioni in campo elastico non lineare Cap. 5<br />
Figura 5.21: Quadro fessurativo al 80% del carico ultimo.<br />
Figura 5.22: Quadro fessurativo al 100% del carico ultimo.<br />
138
Applicazioni in campo elastico non lineare Cap. 5<br />
400<br />
350<br />
300<br />
Carico applicato (KN)<br />
250<br />
200<br />
150<br />
Sperimentale<br />
elaborazione numerica<br />
100<br />
50<br />
0<br />
0 1 2 3 4 5 6 7 8<br />
Freccia massima (mm)<br />
Figura 5.23: Curva carico freccia, sperimentale e calcolato.<br />
Nelle pagine seguenti vengono riportate le immagini <strong>di</strong> fessurazione ricavate<br />
numericamente, da confrontare con il quadro fessurativo sperimentale riportato in figura<br />
5.24.<br />
Figura 5.24: Quadro fessurativo sperimentale sulle 2 facce della trave armata a taglio.<br />
139
Applicazioni in campo elastico non lineare Cap. 5<br />
Figura 5.25: Quadro fessurativo al 15% del carico ultimo.<br />
Figura 5.26: Quadro fessurativo al 40% del carico ultimo.<br />
140
Applicazioni in campo elastico non lineare Cap. 5<br />
Figura 5.27: Quadro fessurativo al 80% del carico ultimo.<br />
Figura 5.28: Quadro fessurativo al 100% del carico ultimo.<br />
141
Applicazioni in campo elastico non lineare Cap. 5<br />
6. Analisi <strong>di</strong> una pila da ponte binata<br />
Si riprende la pila da ponte stu<strong>di</strong>ata in campo elastico lineare e riportata nel capitolo precedente a<br />
pag. 112. Per como<strong>di</strong>tà si riportano le caratteristiche geometriche e meccaniche della pila.<br />
La tipologia della pila è <strong>di</strong> tipo misto (o binata), la pila risulta infatti sud<strong>di</strong>visa in due zone:<br />
900<br />
V<br />
V<br />
40<br />
50<br />
40<br />
20<br />
110<br />
60<br />
Asse del ponte<br />
600<br />
820<br />
4250<br />
(32+32) φ18<br />
per parete<br />
(8+8) φ18<br />
per lama<br />
hp<br />
(53+53) φ30<br />
per lama<br />
(2+2) cavi<br />
per lama<br />
46<br />
46<br />
46<br />
46<br />
46<br />
46<br />
45<br />
107.5<br />
Figura 5.29: Geometria della pila binata (misure in cm).<br />
una prima parte (nella zona inferiore) costituita da un cassone monocellulare composto da due pareti<br />
principali sagomate, trasversali rispetto all’asse del ponte collegate mutuamente da due setti arretrati<br />
e posizionati all’inizio della sagomatura ed una seconda parte (nella zona superiore) costituita da due<br />
lame in<strong>di</strong>pendenti collegate solo in sommità, ottenute come prolungamento delle pareti principali del<br />
cassone.<br />
142
Applicazioni in campo elastico non lineare Cap. 5<br />
Con riferimento alla Figura 5.29 l’estensione relativa al primo tratto <strong>di</strong> altezza h p viene caratterizzata<br />
tramite il parametro <strong>di</strong>mensionale α = h p / h, dove h = 42.5 m. Alla base la pila viene considerata<br />
incastrata rigidamente, e non si eseguirà nessuna modellazione della fondazione o del terreno. In<br />
sommità, essa termina con un tratto molto rigido che, <strong>di</strong> fatto, impone alle due estremità delle lame<br />
gli stessi spostamenti e le stesse rotazioni. L’altezza totale della pila è pari a 42.5 m ed il carico<br />
verticale su ciascuna lama è V = 30 MN. Le caratteristiche geometriche delle sezioni trasversali e le<br />
<strong>di</strong>sposizioni dell’armatura longitu<strong>di</strong>nale vengono mostrate in figura 5.29. Come armatura trasversale<br />
viene considerata una staffatura <strong>di</strong> 1φ10 ogni 10 cm lungo tutto il profilo della pila. Per i materiali si<br />
considerano le seguenti caratteristiche <strong>di</strong> base:<br />
Calcestruzzo: f c0 = -33.2 MPa ε c0 = -0.002 ε cu = -0.0035<br />
Acciaio normale: f sy = 430 MPa E s = 210 GPa ε su = -0.01<br />
Acciaio da precompressione: f py = 1600 MPa E p = 200 GPa ε pu = -0.01<br />
Il modulo <strong>di</strong> rigi<strong>di</strong>tà tangente del calcestruzzo viene assunto pari a (Euroco<strong>di</strong>ce 2):<br />
1/ 3<br />
0 0<br />
=<br />
Ec = 9500 ⋅ f<br />
c<br />
30533<br />
MPa<br />
L’analisi numerica prevede <strong>di</strong> sottoporre la pila ad un carico orizzontale crescente in sommità, sino al<br />
raggiungimento del carico massimo. La pila è stata analizzata in entrambe le <strong>di</strong>rezioni <strong>di</strong> inflessione<br />
<strong>di</strong> fig. 5.30:<br />
Figura 5.30: Direzione <strong>di</strong> flessione 1 e 2.<br />
143
Applicazioni in campo elastico non lineare Cap. 5<br />
Durante la flessione nella <strong>di</strong>rezione 1, il comportamento strutturale è quello <strong>di</strong> tipo trave. Una<br />
aumento dell’altezza della costolatura aumenta la resistenza a flessione della struttura.<br />
14<br />
12<br />
10<br />
Forza orizzontale (MN)<br />
8<br />
6<br />
4<br />
Parametro α<br />
crescente<br />
2<br />
0<br />
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40<br />
Spostamento in sommità (m)<br />
Figura 5.31: Curve forza spostamento per flessione in <strong>di</strong>rezione 1.<br />
Le curve rimangono comunque pressoché simili, in quanto il comportamento globale della struttura<br />
non subisce gran<strong>di</strong> alterazioni rispetto a quello originario, l’incremento <strong>di</strong> resistenza dovuto<br />
all’aumento dell’altezza della costolatura è modesto. Il comportamento è sostanzialmente <strong>di</strong> tipo<br />
trave, a parte una piccola zona <strong>di</strong>ffusiva al termine della costolatura per i casi <strong>di</strong> α = 1/3 e α = 2/3.<br />
Più interessante sono i risultati per una flessione in <strong>di</strong>rezione 2. Anche in questa <strong>di</strong>rezione la pila può<br />
essere pensata come composta da due travi, ma la parte superiore (senza costolatura) possiede una<br />
deformabilità notevolmente superiore rispetto alla parte inferiore a cassone. L’incremento <strong>di</strong><br />
resistenza all’aumentare dell’altezza della costolatura è notevole, e ad un incremento <strong>di</strong> capacità<br />
portante corrisponde un relativo decremento <strong>di</strong> deformabilità. La pila senza costolatura risulta quin<strong>di</strong><br />
essere la più deformabile ma la meno portante (riferito ad una forza orizzontale in sommità), mentre<br />
la pila con sezione uniforme a cassone è la struttura più portante ma meno deformabile.<br />
Dal punto <strong>di</strong> vista computazionale, il modelli utilizzati per l’analisi della flessione in <strong>di</strong>rezione hanno<br />
144<br />
Parametro α<br />
crescente
Applicazioni in campo elastico non lineare Cap. 5<br />
richiesto una mesh <strong>di</strong> circa 5000 gra<strong>di</strong> <strong>di</strong> libertà (contro i circa 2500 nel caso <strong>di</strong> flessione in <strong>di</strong>rezione<br />
1). Nel grafico riportato in Figura 5.32 vengono evidenziate anche le stesse curve ricavate dall’ing.<br />
Bion<strong>di</strong>ni nella sua <strong>Tesi</strong> <strong>di</strong> Dottorato [Bio] con elementi <strong>di</strong> tipo trave.<br />
18<br />
16<br />
14<br />
Analisi con elementi <strong>di</strong> trave<br />
Analisi con elementi soli<strong>di</strong><br />
12<br />
Forza orizzontale (MN)<br />
10<br />
8<br />
6<br />
4<br />
2<br />
0<br />
0 0.2 0.4 0.6 0.8 1 1.2<br />
Spostamento in sommità (m)<br />
Figura 5.32: Curve forza spostamento per flessione in <strong>di</strong>rezione 2.<br />
Si noti l’estrema corrispondenza tra la risposta calcolata con elementi <strong>di</strong> tipo trave e quella con<br />
elementi finiti soli<strong>di</strong>, nei casi della prima e della quarta curva (pila senza costolatura, pila con<br />
costolatura completa). Nel caso <strong>di</strong> una costolatura non completa, l’elemento <strong>di</strong> tipo trave non coglie<br />
in modo sufficientemente corretto la deformabilità dell’elemento, causando delle sovrastime anche<br />
del 20% sulla resistenza ultima. L’errore si incrementerà maggiormente col <strong>di</strong>minuire della snellezza<br />
della pila stessa. Nelle pagine successive si riportano tutti i casi stu<strong>di</strong>ati, con le relative curve carico<br />
spostamento ed i loro quadri fessurativi.<br />
145
Applicazioni in campo elastico non lineare Cap. 5<br />
Pila inflessa in <strong>di</strong>rezione 1 con costolatura nulla (α=0)<br />
Figura 5.33: Mesh indeformata, e visione assonometrica della deformata.<br />
12<br />
10<br />
8<br />
Forza orizzontale (MN)<br />
6<br />
4<br />
Asse del ponte<br />
2<br />
0<br />
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40<br />
Spostamento in sommità (m)<br />
Figura 5.34: Risposta in termini <strong>di</strong> carico orizzontale - freccia.<br />
146
Applicazioni in campo elastico non lineare Cap. 5<br />
Figura 5.35: Quadro fessurativo e danneggiamento per la vista dal lato A. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
Figura 5.36: Quadro fessurativo e danneggiamento per la vista dal lato B. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
147
Applicazioni in campo elastico non lineare Cap. 5<br />
Pila inflessa in <strong>di</strong>rezione 1 con costolatura ad 1/3 dell’altezza totale (α=1/3)<br />
Figura 5.37: Mesh indeformata, e visione assonometrica della deformata.<br />
14<br />
12<br />
10<br />
Forza orizzontale (MN)<br />
8<br />
6<br />
Asse del ponte<br />
4<br />
2<br />
0<br />
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40<br />
Spostamento in sommità (m)<br />
Figura 5.38: Risposta in termini <strong>di</strong> carico orizzontale - freccia.<br />
148
Applicazioni in campo elastico non lineare Cap. 5<br />
Figura 5.39: Quadro fessurativo e danneggiamento per la vista dal lato A. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
Figura 5.40: Quadro fessurativo e danneggiamento per la vista dal lato B. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
149
Applicazioni in campo elastico non lineare Cap. 5<br />
Pila inflessa in <strong>di</strong>rezione 1 con costolatura ad 2/3 dell’altezza totale (α=2/3)<br />
Figura 41: Mesh indeformata, e visione assonometrica della deformata.<br />
14.00<br />
12.00<br />
10.00<br />
8.00<br />
6.00<br />
Asse del ponte<br />
4.00<br />
2.00<br />
0.00<br />
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40<br />
Figura 5.42: Risposta in termini <strong>di</strong> carico orizzontale - freccia.<br />
150
Applicazioni in campo elastico non lineare Cap. 5<br />
Figura 5.43: Quadro fessurativo e danneggiamento per la vista dal lato A. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
Figura 5.44: Quadro fessurativo e danneggiamento per la vista dal lato B. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
151
Applicazioni in campo elastico non lineare Cap. 5<br />
Pila inflessa in <strong>di</strong>rezione 1 con costolatura ad 3/3 dell’altezza totale (α=3/3)<br />
Figura 5.45: Mesh indeformata, e visione assonometrica della deformata.<br />
14.00<br />
12.00<br />
10.00<br />
Forza orizzontale (MN)<br />
8.00<br />
6.00<br />
Asse del ponte<br />
4.00<br />
2.00<br />
0.00<br />
0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40<br />
Spostamento in sommità (m)<br />
Figura 5.46: Risposta in termini <strong>di</strong> carico orizzontale - freccia.<br />
152
Applicazioni in campo elastico non lineare Cap. 5<br />
Figura 5.47: Quadro fessurativo e danneggiamento per la vista dal lato A. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
Figura 5.48: Quadro fessurativo e danneggiamento per la vista dal lato B. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
153
Applicazioni in campo elastico non lineare Cap. 5<br />
Pila inflessa in <strong>di</strong>rezione 2 con costolatura ad 0/3 dell’altezza totale (α=0)<br />
Figura 5.49: Mesh indeformata, e visione assonometrica della deformata.<br />
5<br />
4<br />
Forza orizzontale (MN)<br />
3<br />
2<br />
Asse del ponte<br />
1<br />
0<br />
0 0.2 0.4 0.6 0.8 1 1.2<br />
Spostamento in sommità (m)<br />
Figura 5.50: Risposta in termini <strong>di</strong> carico orizzontale - freccia.<br />
154
Applicazioni in campo elastico non lineare Cap. 5<br />
Figura 5.51: Quadro fessurativo e danneggiamento per la vista dal lato A. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
Figura 5.52: Quadro fessurativo e danneggiamento per la vista dal lato B. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
155
Applicazioni in campo elastico non lineare Cap. 5<br />
Pila inflessa in <strong>di</strong>rezione 2 con costolatura ad 1/3 dell’altezza totale (α=1/3)<br />
Figura 5.53: Mesh indeformata, e visione assonometrica della deformata.<br />
6<br />
5<br />
4<br />
Forza orizzontale (MN)<br />
3<br />
2<br />
Asse del ponte<br />
1<br />
0<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8<br />
Spostamento in sommità (m)<br />
Figura 5.54: Risposta in termini <strong>di</strong> carico orizzontale - freccia.<br />
156
Applicazioni in campo elastico non lineare Cap. 5<br />
Figura 5.55: Quadro fessurativo e danneggiamento per la vista dal lato A. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
Figura 5.56: Quadro fessurativo e danneggiamento per la vista dal lato B. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
157
Applicazioni in campo elastico non lineare Cap. 5<br />
Pila inflessa in <strong>di</strong>rezione 2 con costolatura ad 2/3 dell’altezza totale (α=2/3)<br />
Figura 5.57: Mesh indeformata, e visione assonometrica della deformata.<br />
12<br />
10<br />
8<br />
Forza orizzontale (MN)<br />
6<br />
4<br />
Asse del ponte<br />
2<br />
0<br />
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4<br />
Spostamento in sommità (m)<br />
Figura 5.58: Risposta in termini <strong>di</strong> carico orizzontale - freccia.<br />
158
Applicazioni in campo elastico non lineare Cap. 5<br />
Figura 5.59: Quadro fessurativo e danneggiamento per la vista dal lato A. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
Figura 5.60: Quadro fessurativo e danneggiamento per la vista dal lato B. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
159
Applicazioni in campo elastico non lineare Cap. 5<br />
Pila inflessa in <strong>di</strong>rezione 2 con costolatura ad 3/3 dell’altezza totale (α=3/3)<br />
Figura 5.61: Mesh indeformata, e visione assonometrica della deformata.<br />
18<br />
16<br />
14<br />
12<br />
Forza orizzontale (MN)<br />
10<br />
8<br />
6<br />
Asse del ponte<br />
4<br />
2<br />
0<br />
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4<br />
Spostamento in sommità (m)<br />
Figura 5.62: Risposta in termini <strong>di</strong> carico orizzontale - freccia.<br />
160
Applicazioni in campo elastico non lineare Cap. 5<br />
Figura 5.63: Quadro fessurativo e danneggiamento per la vista dal lato A. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
Figura 5.64: Quadro fessurativo e danneggiamento per la vista dal lato B. Situazioni al 50%, 75% e 100% del carico<br />
ultimo.<br />
161
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
Appen<strong>di</strong>ce A<br />
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
All’interno del mio lavoro <strong>di</strong> tesi ho sviluppato una serie <strong>di</strong> co<strong>di</strong>ci <strong>di</strong> calcolo in linguaggio Microsoft<br />
Visual Fortran. In questo capitolo se ne da un elenco ed una breve descrizione.<br />
In<strong>di</strong>ce dei co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
PreCass<br />
PreC<br />
PrePila<br />
Esa3D<br />
CalcEsa<br />
PostEsa2D<br />
Modellatore per una trave con profilo a cassone<br />
Modellatore per una trave con profilo a C<br />
Modellatore per un pila da ponte binata<br />
Programma <strong>di</strong> grafica 3D<br />
Programma <strong>di</strong> calcolo non lineare<br />
Post Processor 2D<br />
164
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
1. PrePila<br />
I co<strong>di</strong>ci PreCass, PreC, e PrePila sono molto simili, per cui verrà fornita una descrizione del solo<br />
co<strong>di</strong>ce Prepila. Il compito <strong>di</strong> questo programma è quello <strong>di</strong> costruire il modello <strong>di</strong> calcolo <strong>di</strong> una pila<br />
da ponte ponte binata, dovrà perciò fornire come output le coor<strong>di</strong>nate dei no<strong>di</strong> e la matrice delle<br />
incidenze del calcestruzzo, nonché le coor<strong>di</strong>nate nodali e la matrice delle incidenze dell’acciaio<br />
embedded.<br />
LeggiDati<br />
FormaCoordPn1<br />
FormaCoord1<br />
FormaCoordPn2<br />
FormaCoord2<br />
FormaInc1<br />
FormaIncTran<br />
FormaInc2<br />
Or<strong>di</strong>naPiani<br />
CalcCoeff<br />
CalcInter<br />
CalcInter<br />
Stampa<br />
Figura A.1: Schema a blocchi del co<strong>di</strong>ce PrePila.<br />
Nelle pagine seguenti si riporta un esempio <strong>di</strong> file <strong>di</strong> dati, un esempio <strong>di</strong> pila <strong>di</strong>segnata in 2D (non<br />
corrisponde a quella del file <strong>di</strong> dati) e l’output del programma Esa3d.<br />
165
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
File <strong>di</strong> DATI <strong>di</strong> PrePila per la costruzione del modello <strong>di</strong> pila binata<br />
COSTOLA<br />
4 : File <strong>di</strong> coor<strong>di</strong>nate<br />
10.0<br />
20.0<br />
40.0<br />
50.0<br />
LAMA<br />
7 : File <strong>di</strong> coor<strong>di</strong>nate<br />
10.0<br />
20.0<br />
30.0<br />
40.0<br />
50.0<br />
70.0<br />
80.0<br />
SPIGOLI<br />
5.0<br />
10.0<br />
: DY, DZ dei 4 spigoli<br />
ALTEZZA UNITE<br />
4 : File <strong>di</strong> coor<strong>di</strong>nate<br />
10.0<br />
60.0<br />
120.0<br />
150.0<br />
ALTEZZA SEPARATE<br />
4 : File <strong>di</strong> coor<strong>di</strong>nate<br />
150.0<br />
190.0<br />
200.0<br />
230.0<br />
EMBEDDING<br />
: X1,Y1,Z1 X2,Y2,Z2<br />
2<br />
10.0 15.0 15.0 230.0 15.0 15.0<br />
10.0 14.0 14.0 230.0 14.0 14.0<br />
Il programma consente un infittimento della mesh in zone dove è intuitiva la presenza <strong>di</strong> un forte<br />
gra<strong>di</strong>ente <strong>di</strong> sforzi, ad esempio nei punti in cui la pila da profilo a cassone <strong>di</strong>venta a doppia lama.<br />
166
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
Coor<strong>di</strong>nate Lama Coor<strong>di</strong>nate Lama<br />
Coor<strong>di</strong>nate Costola<br />
Coor<strong>di</strong>nate Lama<br />
∆Z<br />
∆Y<br />
Figura A.2: Geometria 2D <strong>di</strong> una pila da ponte binata.<br />
167
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
Figura A.3: La mesh creata da PrePila e visualizzata da Esa3D.<br />
FormaCoordPn1<br />
Calcola le coor<strong>di</strong>nate nodali appartenenti al piano perpen<strong>di</strong>colare all’asse della pila, nella zona <strong>di</strong><br />
profilo a cassone.<br />
FormaCood1<br />
Estende le coor<strong>di</strong>nate nodali piane a tutta l’altezza del profilo a cassone.<br />
FormaCoordPn2<br />
Calcola le coor<strong>di</strong>nate nodali appartenenti al piano perpen<strong>di</strong>colare all’asse della pila, nella zona <strong>di</strong><br />
profilo a doppia lama.<br />
168
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
FormaCood1<br />
Estende le coor<strong>di</strong>nate nodali piane a tutta l’altezza del profilo a doppia lama.<br />
FormaInc1<br />
Forma la matrice delle incidenze per gli elementi esaedrici nella zona <strong>di</strong> profilo a cassone.<br />
FormaIncTran<br />
Forma la matrice delle incidenze per gli elementi esaedrici nella zona <strong>di</strong> transizione dal profilo a<br />
cassone al profilo a doppia lama.<br />
FormaInc1<br />
Forma la matrice delle incidenze per gli elementi esaedrici nella zona <strong>di</strong> profilo a doppia lama.<br />
Or<strong>di</strong>naPiani<br />
Forma un array contenente le incidenze <strong>di</strong> tutte le facce <strong>di</strong> tutti gli esaedri (6 facce per ogni elemento<br />
finito).<br />
CalcCoeff<br />
Calcola i coefficienti angolari <strong>di</strong> tutti i piani rappresentanti le facce degli elementi (or<strong>di</strong>nati nella<br />
subroutine Or<strong>di</strong>naPiani) e <strong>di</strong> tutte le rette rappresentanti gli elementi embedded.<br />
CalcInter<br />
Calcola l’intersezione tra una retta (elemento embedded) e tutti i piani presenti.<br />
ControllaInt<br />
Controlla se l’intersezione calcolata da CalcInter è interna ai no<strong>di</strong> appartenenti a quella faccia, se così<br />
è si è trovata una coor<strong>di</strong>nata dell’elemento embedded.<br />
Stampa<br />
Stampa i risultati: matrice delle coor<strong>di</strong>nate e delle incidenze degli esaedri, matrice delle coor<strong>di</strong>nate e<br />
delle incidenze degli elementi embedded.<br />
169
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
2. Esa3D<br />
Il co<strong>di</strong>ce Esa3D visualizza sullo schermo la geometria della struttura. Come dati riceve le coor<strong>di</strong>nate<br />
nodali, le incidenze e la posizione dell’osservatore (punto <strong>di</strong> osservazione). La visualizzazione sullo<br />
schermo della geometria del solido viene eseguita dopo una serie <strong>di</strong> calcoli geometrici che<br />
permettono <strong>di</strong> proiettare il solido su <strong>di</strong> un piano (piano <strong>di</strong> <strong>di</strong>segno). Fissato un punto all’interno del<br />
corpo (punto osservato) il solido viene proiettato su <strong>di</strong> un piano perpen<strong>di</strong>colare alla linea<br />
congiungente il punto <strong>di</strong> osservazione ed il punto osservato, tramite una rotazione del sistema <strong>di</strong><br />
riferimento vengono poi calcolate le coor<strong>di</strong>nate delle proiezioni dei no<strong>di</strong> sul piano <strong>di</strong> <strong>di</strong>segno<br />
(coor<strong>di</strong>nate in 2D) nonché tutte le <strong>di</strong>stanze nodo – proiezione. Basandosi poi sulla liste dei piani che<br />
formano le facce del solido, sulla lista delle rette che formano gli spigoli del solido, e sulle <strong>di</strong>stanze<br />
prima calcolate, vengono cancellati i tratti <strong>di</strong> linee che sono coperti da parti solide (cancellazione<br />
delle linee nascoste) ed infine viene eseguito il <strong>di</strong>segno del solido sullo schermo.<br />
LeggiDati<br />
Legge la geometria della struttura e il punto <strong>di</strong> osservazione.<br />
Me<strong>di</strong>o<br />
Calcola un punto me<strong>di</strong>o all’interno della struttura e lo assume come punto osservato.<br />
Or<strong>di</strong>naPiani<br />
Forma un array contenente le incidenze <strong>di</strong> tutte le facce <strong>di</strong> tutti gli esaedri (6 facce per ogni elemento<br />
finito).<br />
Or<strong>di</strong>naPiani<br />
Forma un array contenente le incidenze degli spigoli <strong>di</strong> tutti gli esaedri (12 spigolo per ogni elemento<br />
finito).<br />
Piano Pro<br />
Calcola le equazioni <strong>di</strong> tutte le rette <strong>di</strong> proiezione.<br />
170
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
LeggiDati<br />
Me<strong>di</strong>o<br />
Or<strong>di</strong>naPiani<br />
Or<strong>di</strong>naRette<br />
PianoPro<br />
PianoRetta<br />
Portaa2D<br />
CalCoeff<br />
DistaPro<br />
Estremi<br />
ScalaXY<br />
Disegna<br />
DisegnaLinea<br />
Coperto<br />
Figura A.4: Schema a blocchi del co<strong>di</strong>ce Esa3D.<br />
PianoRetta<br />
Calcola le intersezioni tra le rette ed il piano <strong>di</strong> proiezione.<br />
Portaa2D<br />
Calcola le coor<strong>di</strong>nate nel riferimento locale del piano <strong>di</strong> proiezione.<br />
Dista<br />
Calcola le <strong>di</strong>stanze dei no<strong>di</strong> dal piano <strong>di</strong> proiezione.<br />
Disegna<br />
Disegna la geometria della struttura, linea per linea, controllando che lo spigolo non sia coperto da<br />
parti solide.<br />
171
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
Figura A.5: Test <strong>di</strong> prova per la cancellazione delle linee nascoste.<br />
Figura A.6: Profilo a C <strong>di</strong>scretizzato in Elementi Finiti.<br />
172
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
Figura A.7: Trave a C <strong>di</strong>scretizzata in Elementi Finiti.<br />
Figura A.8: Trave a cassone <strong>di</strong>scretizzata in Elementi Finiti.<br />
173
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
3. CalcEsa<br />
In questo lavoro si sono implementati 3 programmi <strong>di</strong> calcolo ad elementi finiti (operanti<br />
rispettivamente con funzioni <strong>di</strong> forma compatibili, incompatibili, e con integrazione selettiva). In<br />
questo paragrafo si da una breve descrizione del co<strong>di</strong>ce <strong>di</strong> calcolo operante con le funzioni<br />
incompatibili alla Wilson.<br />
LeggiDati<br />
Legge la geometria della struttura, i vincoli, le forze, i passi <strong>di</strong> carico e i dati necessari ad effettuare le<br />
proiezioni ortogonali della struttura fessurata. Un esempio <strong>di</strong> file <strong>di</strong> dati è il seguente:<br />
File ESA.PRE:<br />
Problema <strong>di</strong> prova<br />
Dati gen, NCoord NEle NFVar NFCost NVinc NMol NDefI NEmb NDIF NPG NPassi Toll<br />
1482 900 66 66 376 0 0 0 900 8 400 0.01<br />
Coor<strong>di</strong>nate cartesiane, Coor<strong>di</strong>nata X Coor<strong>di</strong>nata Y Coor<strong>di</strong>nata Z<br />
0.000000000000000E+000 0.000000000000000E+000 0.000000000000000E+000<br />
*** *** ***<br />
41.500000000000000 3.800000000000000 9.000000000000000<br />
Incidenze, N1 N2 N3 N4 N5 N6 N7 N8<br />
2 1 7 8 56 55 61 62<br />
*** *** *** *** *** *** *** ***<br />
3 2 8 9 57 56 62 63<br />
Materiale calcestruzzo, FC1 EPS_C1 Fx Fy Fz<br />
31.5D0 -0.002D0 -0.025D0 0.0D0 0.0D0<br />
Forze concentrate variabili, Nodo Fx Fy Fz<br />
1417 0.0 0.0 1.515151515152E-03<br />
*** *** *** ***<br />
1482 0.0 0.0 1.515151515152E-03<br />
Forze concentrate costanti, nodo Fx Fy Fz<br />
1417 -4.5454545454545E-01 0.0 0.0<br />
*** *** *** ***<br />
1482 -4.5454545454545E-01 0.0 0.0<br />
174
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
Vincoli rigi<strong>di</strong>, NGDL Flag (1-Fisso 2-Ce<strong>di</strong>mento) Ce<strong>di</strong>mento<br />
1 1 0.0<br />
*** *** ***<br />
4445 1 0.0<br />
Vincoli elastici concentrati, NNodo T1 T2 T3 Rig<br />
Deformazioni iniziali<br />
Elementi Embed<strong>di</strong>ng incidenze, NEmbed<strong>di</strong>ng per elemento<br />
EE car.,XA YA ZA XB YB ZB EYoung Area DefIniz Ele<br />
Elementi Diffusi, RoX RoY RoZ E FX FY FZ<br />
1.10E-02 3.00E-03 3.00E-03 2.10E+05 4.30E+02 4.30E+02 4.30E+02<br />
*** *** *** *** *** *** ***<br />
1.10E-02 3.00E-03 3.00E-03 2.10E+05 4.30E+02 4.30E+02 4.30E+02<br />
Storia <strong>di</strong> carico, Moltiplicatore<br />
1.00000E+00<br />
***<br />
1.30500E+02<br />
mentre per eseguire le proiezioni ortogonali della struttura fessurata, si richiede in input anche il<br />
file MINCRIS.PRE:<br />
0 1 0<br />
0 0 0<br />
******<br />
0 0 0<br />
0 0 0<br />
0 1 0<br />
Ogni riga rappresenta un elementi finito. Se nella prima colonna vi è 1 significa che l’elemento<br />
appartiene alla proiezione ortogonale sul piano XY, sul piano XZ se è nella seconda colonna, sul<br />
piano YZ se è nella terza colonna. Di questi elementi verranno stampati le matrici delle incidenze<br />
proiettate in 2 <strong>di</strong>mensioni, nonché le proiezioni delle inclinazioni <strong>di</strong> fessurazione.<br />
Semibanda<br />
Calcola la semibanda del sistema risolvente analizzando la matrice delle incidenze.<br />
175
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
Gauss_non_locale<br />
In ogni punto <strong>di</strong> Gauss forma un array con i punti che si dovranno considerare per il calcolo delle<br />
deformazioni in senso non locale. Associa inoltre ad ogni punto il relativo peso.<br />
Forma_der_X<br />
Forma la matrice delle derivate delle funzioni <strong>di</strong> forma rispetto al sistema <strong>di</strong> riferimento generale (x,<br />
y, z). Al suo interno contiene altre subroutine per il calcolo delle derivate rispetto al sistema <strong>di</strong><br />
riferimento standard (ξ,η,ρ), per il calcolo della matrice Jacobiana e del suo determinante, e per la<br />
risoluzione del sistema 3x3 che fornisce le derivate cercate.<br />
Standard_steel<br />
Calcola le coor<strong>di</strong>nate nel sistema <strong>di</strong> riferimento standard delle intersezioni degli elementi embedded<br />
con le facce degli elementi finiti. Utilizza un algoritmo <strong>di</strong> Newton per la risoluzione del problema<br />
non lineare della trasformazione <strong>di</strong> coor<strong>di</strong>nate.<br />
Assembla<br />
Forma la matrice <strong>di</strong> rigidezza della struttura in forma <strong>di</strong> semibanda raddrizzata. Al suo interno<br />
contiene altre subroutine per il calcolo della matrice <strong>di</strong> rigidezza del singolo elemento, per il calcolo<br />
della matrice <strong>di</strong> rigidezza degli elementi embedded e per la condensazione statica dei gra<strong>di</strong> <strong>di</strong> libertà<br />
non compatibili.<br />
Ce<strong>di</strong>m<br />
Impone i vincoli ed i ce<strong>di</strong>menti.<br />
SBGauss<br />
Risolve il sistema lineare con il metodo <strong>di</strong> gauss. Contiene delle subroutine per il calcolo del residuo<br />
e per un eventuale raffinamento iterativo della soluzione.<br />
Defo_loc<br />
Calcola le deformazioni in senso locale per ogni elemento finito.<br />
176
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
Defo_non_loc<br />
Calcola le deformazioni in senso non locale per ogni elemento finito e le sostituisce a quelle locali.<br />
Aggiorna moduli<br />
Esegue il calcolo dei moduli <strong>di</strong> elasticità danneggiati e della relativa matrice <strong>di</strong> rigi<strong>di</strong>tà del materiale.<br />
Contiene al suo interno le subroutine per il calcolo degli autovalori e degli autovettori con il metodo<br />
<strong>di</strong> Jacobi, per la valutazione dei legami costitutivi, per la formazione della matrice <strong>di</strong> rotazione e per<br />
il calcolo della matrice <strong>di</strong> rigi<strong>di</strong>tà nel sistema <strong>di</strong> riferimento globale (x, y, z).<br />
Stress<br />
Calcola le tensioni nei materiali.<br />
Squilibrio<br />
Calcola il vettore delle forze nodali interne ed il relativo vettore dello squilibrio (<strong>di</strong>fferenza tra forze<br />
nodali esterne e forze nodali interne).<br />
Convergenza<br />
Decide se le iterazioni in campo non lineare sono giunte a convergenza.<br />
Stampa_ris<br />
Stampa i risultati dell’elaborazione in termini <strong>di</strong>: curva forza - spostamento in un punto della<br />
struttura, spostamenti, forze nodali interne e squilibrio in tutti i punti della struttura, tensioni e<br />
deformazioni in tutti i punti <strong>di</strong> gauss, proiezioni ortogonali dei piani <strong>di</strong> fessurazione negli elementi<br />
desiderati.<br />
177
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
LeggiDati<br />
Inizializza<br />
Semibanda<br />
Gauss_non_locale<br />
Incrementa carico<br />
Sino a convergenza<br />
Forma_der_X<br />
Standard_steel<br />
Aggiorna_FNE<br />
Assembla<br />
Ce<strong>di</strong>m<br />
SBGauss<br />
Per ogni elemento:<br />
Forma_der_csi<br />
Forma_Jacobiano<br />
Calcola_der_X<br />
Per ogni elemento:<br />
Forma_K_loc<br />
Forma_K_embedded<br />
Condensa_K<br />
Assembla_K_loc<br />
Defo_loc<br />
Defo_non_loc<br />
Aggiorna_moduli<br />
Stress<br />
Squilibrio<br />
Per ogni elemento:<br />
Calcola_autovalori<br />
Calcola_D123<br />
Forma_T<br />
Calcola_DXYZ<br />
Convergenza<br />
Stampa_ris<br />
Fine elaborazione<br />
Figura A.9: Schema a blocchi del co<strong>di</strong>ce CalcEsa.<br />
178
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
4. PostEsa2D<br />
Disegna a video le proiezioni ortogonali della struttura, con il relativo quadro fessurativo.<br />
LeggiDati<br />
Leggi_inclinazioni<br />
Dis_mesh<br />
Cicla 2 o 3 volte<br />
a seconda dei dati<br />
Dis_fessure<br />
Leggi_danno<br />
Dis_mesh<br />
Cicla 2 o 3 volte<br />
a seconda dei dati<br />
Dis_danno<br />
Stop<br />
Figura A.10: Schema a blocchi del co<strong>di</strong>ce PostEsa2D.<br />
I dati per il <strong>di</strong>segno delle proiezioni ortogonali vengono stampati dal co<strong>di</strong>ce CalcEsa. La subroutine<br />
Dis_danno colora le proiezioni degli elementi finiti a seconda del valore dell’in<strong>di</strong>ce <strong>di</strong> fessurazione<br />
posseduto da quell’elemento. Come in<strong>di</strong>ce <strong>di</strong> fessurazione si è assunta la me<strong>di</strong>a delle deformazioni<br />
principali in trazione eseguita sui punti <strong>di</strong> Gauss dell’elemento. La colorazione cambia da chiaro a<br />
scuro a seconda della gravità della fessurazione. Nella pagina successiva si riportano 2 esempi <strong>di</strong><br />
post-processing.<br />
179
Co<strong>di</strong>ci <strong>di</strong> calcolo sviluppati<br />
App. A<br />
Figura A.11: Quadro fessurativo e danno nella trave <strong>di</strong> Bresler Scordelis.<br />
Figura A.12: In<strong>di</strong>ce <strong>di</strong> danno in una pila binata sottoposta a flessione.<br />
180
Bibliografia<br />
App. B<br />
Appen<strong>di</strong>ce B Bibliografia<br />
Libri sulla modellazione numerica e sulle tematiche strutturali<br />
(L1)<br />
(L2)<br />
(L3)<br />
(L4)<br />
Introduzione al metodo degli elementi finiti<br />
Francesco Cesari – Pitagora E<strong>di</strong>trice Bologna<br />
Problemi non lineari nella meccanica del continuo<br />
Francesco Cesari – Pitagora E<strong>di</strong>trice Bologna<br />
Co<strong>di</strong>ci <strong>di</strong> calcolo per l’analisi <strong>di</strong> strutture spaziali<br />
Francesco cesari – Pitagora E<strong>di</strong>trice Bologna<br />
Analisi per elementi finiti: Modellazione strutturale e controllo dei risultati<br />
Autori Vari – Cism<br />
(L5) The Finite Element Method – Vol 1<br />
Zienkiewicz, Taylor – McGraw Hill<br />
(L6) The Finite Element Method – Vol 2<br />
Zienkiewicz, Taylor – McGraw Hill<br />
(L7)<br />
(L8)<br />
(L9)<br />
(L10)<br />
(L11)<br />
(L12)<br />
Fondamenti del metodo degli elementi finiti<br />
Brebbia, Connor – CittàStu<strong>di</strong>E<strong>di</strong>zioni<br />
Programming the finite element method<br />
Smith, Griffiths – Wiley<br />
Finite Element Procedures<br />
Klaus, Bathe – Prentice Hall<br />
Modellistica Numerica per Problemi Differenziali<br />
Quarteroni – Sprinter<br />
Matematica Numerica<br />
Quarteroni, Sacco, Saleri – Sprinter<br />
Analisi numerica<br />
Comincioli – McGraw Hill<br />
(L13) Meccanica delle strutture – Vol 1,<br />
Corra<strong>di</strong> – McGraw Hill<br />
181
Bibliografia<br />
App. B<br />
(L14) Meccanica delle strutture – Vol 2<br />
Corra<strong>di</strong> – McGraw Hill<br />
(L15) Meccanica delle strutture – Vol 3<br />
Corra<strong>di</strong> – McGraw Hill<br />
(L16)<br />
(L17)<br />
The finite element method<br />
Thomas J. R. Hughes<br />
Non linear finite elements for continua and structures<br />
Belytschko, Kam liu, Moran - Wiley<br />
(L18) Non linear finite element analysis of solid and structures – Vol 1<br />
Crisfield – Wiley<br />
(L19)<br />
(L20)<br />
(L21)<br />
(L22)<br />
Non linear finite element analysis of solid and structures – Vol 2Advanced Topics<br />
Crisfield – Wiley<br />
Meccanica dei materiali<br />
Vergani – McGraw Hill<br />
Equazioni <strong>di</strong>fferenziali alle derivate parziali<br />
Prouse – Masson<br />
Unified theory of reinforced concrete<br />
Hsu – CRC Press<br />
Articoli e tesi<br />
[Bal]<br />
[Bar]<br />
[BeH]<br />
[BiB]<br />
[Bio]<br />
Balan – Filippou – Popov, Costitutive model for 3D cyclic analysis of concrete structures,<br />
Journal of engineering mechanics, 1997<br />
Barbini, Analisi elastoplastica <strong>di</strong> strutture in regime “plan strain” e <strong>di</strong> “plan stress”, <strong>Tesi</strong><br />
<strong>di</strong> laurea, 1987<br />
Belarbi - Hsu, Costitutive laws of softened concrete in biaxial tension-compression, ACI<br />
Journal, 1995<br />
Bion<strong>di</strong>ni – Bontempi – Malerba – Martinez y Cabrera, Analisi non lineare <strong>di</strong> pile da ponte<br />
a doppia lama, Giornate AICAP99<br />
Bion<strong>di</strong>ni, Strutture da ponte soggette ad azioni <strong>di</strong> tipo sismico. Modellazione ed<br />
ottimizzazione, <strong>Tesi</strong> <strong>di</strong> dottorato, 2000.<br />
182
Bibliografia<br />
App. B<br />
[BoM1] Bontempi - Malerba, Il controllo della formulazione tangente per la soluzione <strong>di</strong> problemi<br />
strutturali non lineari, Stu<strong>di</strong> e ricerche 17, 1996<br />
[BoM2] Bontempi - Malerba, The role of softening in the numerical analysis of R.C. framed<br />
structures, Structural Engineering and Mechanics, Vol 5 1997<br />
[BMR1] Bontempi – Malerba – L. Romano, Formulazione <strong>di</strong>retta secante dell’analisi non lineare <strong>di</strong><br />
telai in C. A. e C. A. P. Stu<strong>di</strong> e ricerche 16, 1994<br />
[BMR2] Bontempi – Malerba – L. Romano, Il modello MCFT nell’analisi per elementi finiti <strong>di</strong><br />
strutture piane in C.A.. Stu<strong>di</strong> e ricerche 16, 1994<br />
[Cer]<br />
[Cek1]<br />
[Cek2]<br />
[Cek3]<br />
[Cic]<br />
[Col1]<br />
[CoS]<br />
[CoS]<br />
[DaG]<br />
[DaP1]<br />
[DaP2]<br />
[DeA]<br />
Cervera, Simulaciòn numérica de patologìas en presas de hormigon, Technical Report<br />
CINME, 1991<br />
Cervenka – Gerstle, Inelastic analysis of reinforced concrete panels: Theory, IABSE<br />
Pubblications, vol. 31 1971<br />
Cervenka – Gerstle, Inelastic analysis of reinforced concrete panels: experimental,<br />
verification and application, IABSE Pubblications, vol. 32 1972<br />
Cervenka – Pukl, Computer models of concrete structures, Structural Engineering<br />
International, vol. 2/92 1992<br />
Ciccone, Formulazione secante e formulazione tangente nell’analisi non lineare delle<br />
strutture intelaiate in C.A. e C.A.P., <strong>Tesi</strong> <strong>di</strong> specializzazione, 1994<br />
Collins – Stevens – Uzmeri – Will, Costitutive model for reinforced concrete finite element<br />
analysis, ACI Structural Journal, 1991<br />
Colombi – Sgambi, Non linear finite element analysis of bone-cement interface con<strong>di</strong>tion<br />
in cemented total hip replacement, Engineering Transactions, vol. 47, 1999<br />
Colombi – Sgambi, Non linear finite element analysis of a cemented interface: the bonecement<br />
interface in HIP replacements, Stu<strong>di</strong> e Ricerche, 1999<br />
Danzo – F. Grimol<strong>di</strong>, Analisi per elementi finiti <strong>di</strong> elementi strutturali in C.A. con il<br />
modello <strong>di</strong> N. S. Ottosen (M.C.90), <strong>Tesi</strong> <strong>di</strong> Laurea, 1998<br />
Darwin – Pecknold, Analysis of RC shear panels under cyclic loa<strong>di</strong>ng, Journal of the<br />
structural Division, 1976<br />
Darwin – Pecknold, Non linear biaxial stress-strain law for concrete, Journal of the<br />
Engineering Mechanics Division, 1977<br />
De Amicis, Elementi in C.A. in regime membranale. Teorie, confronti e apllicazioni, <strong>Tesi</strong><br />
<strong>di</strong> Laurea, 2000<br />
183
Bibliografia<br />
App. B<br />
[Elw]<br />
[Kwa]<br />
[Kon]<br />
[KuG]<br />
[Les]<br />
[LOD]<br />
[Mai]<br />
[Maz]<br />
[MaC]<br />
[PeM]<br />
[Riz]<br />
[Sga]<br />
[SiJ1]<br />
[SiJ2]<br />
[Tay]<br />
[TaS]<br />
Elwi – Murray, A 3D hipoelastic concrete costitutive relationship, Journal of the<br />
Engineering Mechanics Division, 1979<br />
Kwak, Improved numerical approach for the bond-slip behavior under cyclic loads,<br />
Structural Engineering and Mechanics, 1997<br />
Konke, Damage evolution in ductile materials: from micro - to macro damage,<br />
Computational Mechanics 15, 1996<br />
Kupfer – Gerstle, Behavior of concrete under biaxial stresses, J. of the Engineering<br />
Mechanics Division, 1973<br />
On the convergence of Wilson’s Non-conforming Element for Solving the Elastic Problem,<br />
Computer Methods in Applied Mechanics and Engineering, 7 (1976)<br />
Luccioni – Oller – Danesi, Coupled plastic-damaged model, Computer Methods in Applied<br />
Mechanics and Engineering, 1996<br />
Maier, Dispense del corso <strong>di</strong> Meccanica dei Materiali e della Frattura<br />
Mazars, A description of micro- and macroscale damage of concrete structures,<br />
Engineering Fracture Mechanics, Vol. 25 1986<br />
J. Mazars – G. P. Cabot, Continuum damage theory. Application to concrete. J. of<br />
Engineering Mechanics, 1989<br />
M. A. Perego, Danneggiamento dei materiali lapidei: leggi costitutive, analisi per elementi<br />
finiti ed applicazioni, <strong>Tesi</strong> <strong>di</strong> Laurea, 1990<br />
Rizzi, Fracture-energy-based regularization of a scalar damage model, <strong>Politecnico</strong> <strong>di</strong><br />
milano, DIS<br />
Sgambi, Danneggiamento, plasticità e microstruttura nell’analisi del comportamento<br />
meccanico del tessuto osseo spongioso, <strong>Tesi</strong> <strong>di</strong> Laurea, 1998<br />
J. C. Simo – J. W. Ju, Strain and stress-based continuum damage models 1) Formulation,<br />
Int. J. Solids Structures, Vol 23 1987<br />
J. C. Simo – J. W. Ju, Strain and stress-based continuum damage models 2) Computational<br />
aspects, Int. J. Solids Structures, Vol 23 1987<br />
Taylor, A Nonconforming Element for Stress Analysis, International Journal for Numerical<br />
Methods in Engineering, 10, no. 6 (1976)<br />
Taylor – Simo – Zienkiewicz - Chan, The Patch Test: a con<strong>di</strong>tion for assessing finite<br />
element convergence, International Journal for Numerical Methods in Engineering,1984<br />
184
Bibliografia<br />
App. B<br />
[Val]<br />
[Vec1]<br />
[Vec2]<br />
[Vec3]<br />
Valliappan – Doolan, Non linear analysis of reinforced concrete, ASCE Journal of<br />
Structural Division, vol. 98, ST4<br />
Vecchio – Collins, Pre<strong>di</strong>cting the response of reinforced concrete beams subjected to shear<br />
using mo<strong>di</strong>fied compression field theory, ACI structural journal, 1988<br />
Vecchio, Non linear finite element analysis of reinforced concrete membranes, ACI<br />
Structural Journal, 1989<br />
Vecchio, Reinforced concrete membranes element formulations, ASCE Journal of<br />
Structural <strong>di</strong>vision, vol. 16 no. 3<br />
[VMW] Valliappan – Murti – Wohua, Finite element analysis of anisotropic damage mechanics<br />
problems, Engineering Fracture Mechanics, 1990<br />
[VYK]<br />
[Wan]<br />
[Wil1]<br />
[Wil2]<br />
[Wil3]<br />
[Wil4]<br />
[WuH]<br />
[ZhB]<br />
Valliappan – Yazdchi – Khalili, Earthquake analysis of gravity dams based on damage<br />
mechanics concept, International Journal for Numerical and Analytical Methods in<br />
Geomechanics, 1996<br />
Wang – Teng – Cheong Fan, Softened damage model for finite element analysis of<br />
structural concrete deep beams, ACI structural journal, 2001<br />
Wilson et alt., Incompatible Displacement Models, Numerical and Computer Models in<br />
Structural Mechanics, Academic Press, pag 47-57<br />
Wilson - Ibrahimbegovic., Use of incompatible <strong>di</strong>splacement modes for the calculation of<br />
element stiffnesses or stresses, Finite Elements in Analysis and Design, 1990<br />
Wilson, The static condensation algorithm, International Journal for Numerical Methods in<br />
Engineering,1974<br />
Wilson, Sap80 Structural Analysis Program for small or large computer system, CEPA fall<br />
Conference, 1980<br />
Wu – Huang - Pian, Consistency con<strong>di</strong>tion and convergence criteria of incompatible<br />
elements: General formulation of incompatible functions and its applications, Journal of<br />
Computer Structure, 1987<br />
Zhefeng – Breyesse, Three-<strong>di</strong>mensional non linear analysis of reinforced concrete beams,<br />
Engineering Computation, 1991<br />
185