55 A implementacao do controlador é feita atraves <strong>de</strong> urn circuito <strong>de</strong> PWM (Pulse Width Modulation), ou modulacao por largura <strong>de</strong> pulsos, corn a finalida<strong>de</strong> <strong>de</strong> regular a potencia eletrica na resistencia <strong>de</strong> aquecimento. A vantagem do PWM no controle <strong>de</strong> temperatura, é que a potencia entregue a carga se torna uma relacao dos tempos estabelecidos para os duty cycles alto e baixo da forma <strong>de</strong> onda <strong>de</strong> saida. Para fazer uma estimativa dos tempos é necessario conhecimento do processo, atraves da variacao na potencia <strong>de</strong> aquecimento e o monitoramento da temperatura no compartimento do RN em malha aberta, <strong>de</strong>finindo a funcao <strong>de</strong> transferencia da incubadora. Para gerar os tempos do PWM sao utilizados os temporizadores internos (TimerO e/ou Timer]) do microcontrolador escolhido. Os valores <strong>de</strong>finidos no THO (tempo alto do TimerO) sao os valores <strong>de</strong> tempo alto do PWM, e os valores <strong>de</strong> TLO (tempo baixo do TimerO) sao os valores para o tempo baixo do PWM. Na escolha <strong>de</strong>stes coeficientes sao feitas algumas tentativas e a conseqiiente medida da estabilida<strong>de</strong> do processo no tempo. Varios ajustes sao necessarios ate conseguir os indices prescritos em norma. Com os valores acertados, e gravada uma tabela na memoria interna do microcontrolador. Na Figura 10 e mostrada parte da rotina em linguagem assembly que <strong>de</strong>fine os coeficientes <strong>de</strong> THO e TLO (TimerO) do microcontrolador AT89C52 utilizado. A tabela <strong>de</strong> coeficientes é composta <strong>de</strong> 41 conjuntos <strong>de</strong> 4 bytes cada. Sao colocados 41 coeficientes para estabelecer urn valor diferente no PWM a cada erro <strong>de</strong> 0,1°C entre o setpoint e a temperatura <strong>de</strong> referencia, ou seja, quando o erro estiver negativo entre zero e 4°C, havera variacao nos tempos do PWM e a conseguinte variacao na corrente <strong>de</strong> resistencia. Quando o erro estiver negativo e passar <strong>de</strong> 4°C a potencia sera maxima sobre a resistencia, colocando o maior coeficiente no timer THO. Os timers do microcontrolador AT89C52 possuem estrutura <strong>de</strong> 16 bits cada, entao cada linha da tabela (por exemplo: DB OOH, 01H, F2H, DOH) equivale a ter: TH0=0010h e TLO=F2D0h. Quanto mais negativo se torna o erro, maior é o tempo alto THO, indicando que o triac <strong>de</strong>ve ficar mais tempo conduzindo e liberando corrente eletrica para a resistencia.
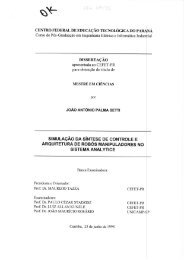
56 CONSTMAIS: DB 00H,10H,F2H,DOH DB 00H,20H,F4H,E0H DB 00H,30H,F5H,E0H DB 00H,40H,F6H,E0H DB 00H,50H,F7H,E0H DB 00H,60H,F8H,E0H DB 03H,60H,FFH,DOH DB 03H,70H,FFH,DOH DB 03H,80H,FFH,DOH DB 03H,90H,FFH,DOH DB 04H,00H,FFH,DOH Figura 10 - Parte da rotina em assembly que estabelece os coeficientes do PWM utilizados no controle <strong>de</strong> potencia da incubadora neonatal 4.3.4.3.1 DRIVER DE POTENCIA PARA A RESISTENCIA DE AQUECIMENTO 0 diagrama esquematico do controle <strong>de</strong> temperatura esta <strong>de</strong>scrito na Figura 11. Resistencia <strong>de</strong> Ad u eel m e nto Figura 11 - Diagrama esquematico representando a interface <strong>de</strong> I/O do microcontrolador corn o driver da resistencia <strong>de</strong> aquecimento. 0 pino <strong>de</strong> I/0 da Porta 3 (pino 14 do AT89C52) é conectado a um driver <strong>de</strong> potencia (triac T I) para que o microcontrolador controle a corrente eletrica sobre a