Kapitola 3Popis křivek a ploch pro <strong>geometrické</strong><strong>modelování</strong>3.1 Rovnice křivek a plochK popisu křivek a ploch se v diferenciální geometrii používá vektorových funkcí.Definice 3.1 Množinu k ⊂ E 3 nazveme křivkou třídy C n , jestliže existuje aspoň jedna vektorováfunkce P (t) třídy C n s definičním oborem I (otevřený interval) a platí:1. P ′ (t) ≠ o pro každé t ∈ I,2. P (t) je prosté zobrazení intervalu I na množinu k.Definice křivky může být modifikována:• místo zobrazení prostého se požaduje zobrazení homeomorfní, tj. spojité a prosté zobrazení,pro nějž je spojité i inverzní zobrazení a nepožaduje se nenulový vektor prvníderivace — elementární křivka• prostá křivka je souvislá a je “lokálně” elementární křivkou (platí, že křivka je prostoukřivkou, je-li homeomorfním obrazem otevřeného intervalu nebo kružnice)• obecnou křivkou rozumíme lokálně homeomorfní obraz otevřeného intervalu nebo kružnice— zobrazení je lokálně homeomorní, jestliže restrikce zobrazení na okolí libovolného boduje homeomorfismem.Definice 3.2 Množinu κ ⊂ E 3 nazveme plochou třídy C n , jestliže existuje aspoň jedna vektorováfunkce P (u, v) třídy C n s definičním oborem (oblastí) Ω ⊂ R 2 a platí:1.∂P (u,v)∂u= P u a∂P (u,v)∂v= P v jsou pro každé (u, v) ∈ Ω lineárně nezávislé2. P (u, v) je homeomorfismem oblasti Ω na množinu k.18
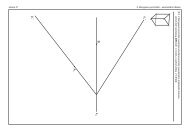
3.2 Parametrizace křivkyDefinice 3.3 Nechť P (t), t ∈ I je křivka. Nechť je dána reálná funkce φ(t) třídy C n definovanána otevřeném intervalu I ⋆ a nechť φ má na I ⋆ nenulovou první derivaci a zobrazuje intervalI ⋆ na interval I. Uvažujeme-li křivku P (φ(t ⋆ )), t ⋆ ∈ I ⋆ , řekneme, že pro danou křivku bylaprovedena transformace parametru.Věta 3.1 Nechť P (t), t ∈ I a P ⋆ (t ⋆ ), t ⋆ ∈ I ⋆ jsou dvě vyjádření téže křivky. Pak existujetransformace parametru φ(t) tak, žeDůkaz: Plyne z věty o implicitních funkcích.P (t) = P ⋆ (φ(t)), t ∈ I.Zavedení orientace křivky můžeme provést podle toho, je-li mezi dvěma jejími parametrizacemitransformační funkce rostoucí nebo klesající. Tak se parametrizace rozpadnou na dvě třídy.3.3 Parametrické vyjádření kuželoseček3.3.1 KružniceUvažujme kružnici se středem v počátku a s poloměrem r. Parametrické rovnice jsou tvaruVe vektorovém tvaru můžeme psát:x = r cos t, y = r sin t, t ∈ (0, 2π〉P = P 1 cos t + P 2 sin t, t ∈ (0, 2π〉,kde P 1 = (r, 0) a P 2 = (0, r).Obrazem kružnice ve shodnosti je opět kružnice a pro obecně umístěnou kružnici v prostorutedy můžeme napsat její vektorové vyjádření ve tvaruP = S + P 1 cos t + P 2 sin t, t ∈ (0, 2π〉, (3.1)kde S je polohový vektor středu kružnice a vektory P 1 a P 2 jsou na sebe kolmé vektory ostejné velikosti (určují na sebe kolmé poloměry).3.3.2 ElipsaParametrické vyjádření elipsy získáme z tzv. trojúhelníkové konstrukce bodu elipsy - obr. 3.1.Elipsa má v tomto případě parametrické vyjádřeníx = a cos t, y = b sin t, t ∈ (0, 2π〉,kde a, resp. b jsou délky hlavní, resp. vedlejší poloosy elipsy. Podobně jako u kružnice můžemei pro elipsu umístěnou v prostoru psát obecné vektorové vyjádření ve tvaru 3.1. Vektory P 1 aP 2 jsou na sebe kolmé a určují poloosy elipsy.19
- Page 1 and 2: Západočeská univerzita v Plzni,
- Page 3 and 4: 3.3.5 Parametrizace pomocí racion
- Page 5 and 6: 11 Modelování těles 7611.1 Jemn
- Page 7 and 8: Kapitola 1Úvod1.1 Pojem modeluV to
- Page 9 and 10: Konstrukce Příprava výroby Výro
- Page 11 and 12: 2.2 Geometrické transformace v rov
- Page 13 and 14: 2.3.1 Posunutí neboli translacePos
- Page 15 and 16: Snadno zjistíme, že daná matice
- Page 17: 2.2 Určete obrazy bodů S[1, 2] a
- Page 21 and 22: FOR i:=1 TO n DO{Cykl pro jednotliv
- Page 23 and 24: Důkaz: Je snadným důsledkem vět
- Page 25 and 26: Důkaz: Vektory m 1 (t), m 2 (t), m
- Page 27 and 28: 3.7 Kontrolní otázky3.1 Jak ově
- Page 29 and 30: 4.1 Interpolační křivkyV numeric
- Page 31 and 32: tj.x = 2t − 1, y = −2t 2 + 2t,
- Page 33 and 34: Obrázek 4.2:4.4 Spline stupně sP
- Page 35 and 36: Kapitola 5Bézierovy křivkyTeorie
- Page 37 and 38: • Platín∑Bi n (t) = 1pro každ
- Page 39 and 40: 6. Libovolný polynom stupně n lze
- Page 41 and 42: VypočtemeP ′ (0) = 1 64∑V i C
- Page 43 and 44: Porovnáním vztahů pro výpočet
- Page 45 and 46: 6.3 B-spline křivkyB-spline křivk
- Page 47 and 48: 6.7 Kontrolní otázky6.1 Uveďte p
- Page 49 and 50: 7.2.1 Vlastnosti racionálních Bé
- Page 51 and 52: a k = 2, T = (0, 0, 1, 2, 2).Afinn
- Page 53 and 54: Důkaz: Tvrzení je snadným důsle
- Page 55 and 56: tj. takto zadané body tvoří rovn
- Page 57 and 58: Plocha, která je vytvořena jako B
- Page 59 and 60: • Translační plochy, u nichž j
- Page 61 and 62: Kapitola 9Coonsovy plochy - plochy
- Page 63 and 64: Snadno dokážeme, že tato plocha
- Page 65 and 66: 9.5 Obecný Coonsův plátUvedli js
- Page 67 and 68: Kapitola 10Shrnutí poznatků o kř
- Page 69 and 70:
10.1.3 Bézierovy křivkyGlobální
- Page 71 and 72:
• na okrajových křivkách stano
- Page 73 and 74:
10.2.7 Obecný Coonsův plátDáno:
- Page 75 and 76:
10.2.12 Trojúhelníkové plátyDá
- Page 77 and 78:
• E - počet hran tělesa,• F -
- Page 79 and 80:
• CSG reprezentace - CSG = Constr
- Page 81 and 82:
(a) PICME metody. V roce 1986 Sunde
- Page 83 and 84:
Kapitola 12CAD/CAM/PLMUplatnění v
- Page 85 and 86:
uchopení vede jen k výpočtu geom
- Page 87 and 88:
cholů, hran nebo i dvojice ploch.
- Page 89 and 90:
12.4 Výběr CAD systémuJak si z r
- Page 91 and 92:
Literatura[1] Bär, G.: Geometrie.