4-2015
Fachzeitschrift für Elektronik-Produktion - Fertigungstechnik, Materialien und Qualitätsmanagement
Fachzeitschrift für Elektronik-Produktion - Fertigungstechnik, Materialien und Qualitätsmanagement

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
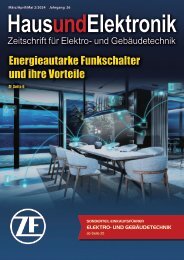
Hexapoden in der Mikroproduktion<br />
Präzise positionieren bei Montage und Qualitätssicherung:<br />
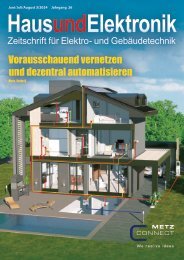
Bild 1: Der Hexapod lässt sich<br />
dank seiner hohen Quersteifigkeit<br />
in beliebiger Richtung montieren.<br />
(Alle Bilder: PI)<br />
Was haben optische Komponenten,<br />
Glasfasern in der Photonik,<br />
Smartphones und hochwertige<br />
Armbanduhren gemeinsam?<br />
Mehr als man denkt: Schließlich<br />
geht es in allen Fällen darum,<br />
bei der Montage die einzelnen<br />
Komponenten, Bauelemente oder<br />
Werkstücke präzise zu positionieren,<br />
meist sogar in mehreren<br />
Achsen. Aber nicht nur während<br />
dieser Montageprozesse gilt es,<br />
auf engstem Raum mit höchster<br />
Genauigkeit zu arbeiten. Auch<br />
für die begleitende oder an die<br />
Montage anschließende Qualitätssicherung<br />
müssen Messsonden,<br />
Optik oder Kamerasysteme<br />
exakt positioniert wer-<br />
Autoren::<br />
Dipl.-Phys. Steffen Arnold,<br />
Leiter „Markt und Produkte“<br />
bei Physik Instrumente<br />
(PI) GmbH & Co. KG, und<br />
Ellen-Christine Reiff, M.A.,<br />
Redaktionsbüro Stutensee<br />
Qualitätssicherung<br />
den. Die Spanne reicht von<br />
„manueller Manipulation“ unter<br />
dem Mikroskop bis hin zu vollständig<br />
automatisierten, kamerabasierten<br />
Lösungen. Hierfür<br />
gilt es, die passenden Positioniersysteme<br />
zu finden.<br />
Die Mikroproduktionstechnik<br />
verlangt heute sowohl bei<br />
der Montage als auch bei der<br />
Qualitätssicherung nach präzisen,<br />
meist mehrachsigen Positioniersystemen,<br />
die möglichst<br />
kompakt sein sollen, um sich<br />
gut in die Fertigungseinheiten<br />
zu integrieren (Bild 1). Dabei<br />
müssen meist geringe Massen<br />
positioniert werden. Ein gutes<br />
Beispiel für eine solche Fertigung<br />
liefert die Uhrenindustrie,<br />
denn die Produktion der feinmechanischen<br />
Wunderwerke<br />
verlangt der eingesetzten Positioniertechnik<br />
einiges ab. Ähnliche<br />
Beispiele finden sich in vielen<br />
anderen Sparten, z.B. bei der<br />
Produktion von mobilen Endgeräten,<br />
wenn bestimmte Bauteile<br />
im Gerät für das Verkleben<br />
exakt ausgerichtet und in<br />
Position gehalten werden müssen.<br />
Gleiches gilt für das Justieren<br />
optischer Linsen z.B. in<br />
Objektiven, Ferngläsern oder<br />
auch auf Kamera-Sensorchips,<br />
etwa für Rückfahrkameras im<br />
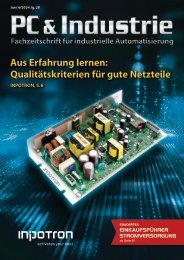
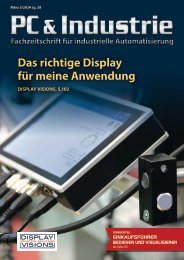
Kfz-Bereich. Auch die Photonik<br />
stellt solche Anforderungen,<br />
wenn die Fasern exakt positioniert<br />
werden müssen, um das<br />
„First Light“ zu erreichen (Bild 2).<br />
Bild 2: Auch die Photonik stellt hohe Anforderungen, wenn die Fasern<br />
exakt positioniert werden müssen, um das sogenannte „First light“ zu<br />
erreichen.<br />
Sind solche Arbeitsabläufe volloder<br />
teilautomatisiert, ist man<br />
auf die Signale externer Sensoren,<br />
Kameras oder Machine-Vision-<br />
Lösungen angewiesen. Das verwendete<br />
Positioniersystem sollte<br />
sich deshalb möglichst einfach<br />
in den übergeordneten Automatisierungsverbund<br />
integrieren<br />
lassen – eine Forderung, die für<br />
die Mikromontage ebenso gilt<br />
wie für die Qualitätssicherung.<br />
Die Praxis zeigt, dass sich hier<br />
parallelkinematische Systeme<br />
anbieten. Ein gutes Beispiel sind<br />
sogenannte Hexapoden, also<br />
sechsachsige parallelkinematische<br />
Systeme, die im Mikround<br />
Submikrometerbereich<br />
genau positionieren können.<br />
Aufgrund ihrer hohen Steifigkeit<br />
haben sie ein ausgezeichnetes<br />
Regel- und Einschwingverhalten.<br />
Sie positionieren die<br />
Lasten in drei linearen und drei<br />
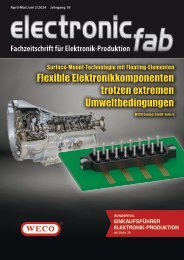
rotatorischen Achsen. Dabei wirken<br />
alle Antriebe auf eine einzige<br />
bewegte Plattform, woraus<br />
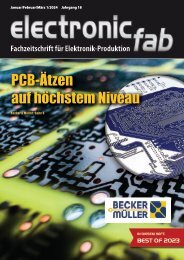
sich weitere Vorteile gegenüber<br />
seriellen, also gestapelten Systemen<br />
(Bild 3) ergeben: bessere<br />
Bahntreue, größere Wiederholgenauigkeit<br />
und Ablaufeben heit,<br />
geringere bewegte Masse und<br />
damit höhere, für alle Bewegungsachsen<br />
gleiche Dynamik,<br />
kein Mitschleppen von Kabeln<br />
und kompakterer Aufbau. Der<br />
Drehpunkt (Pivot-Punkt) ist frei<br />
definierbar.<br />
Bild 3: Im Gegensatz zur seriellen Kinematik wirken bei parallelkinematischen<br />
Systemen alle Aktoren unmittelbar auf die gleiche Plattform<br />
Ein typischer Vertreter<br />
ist der Miniatur-Hexapod<br />
H-811 (Bild 4) von PI. Mit Stellbereichen<br />
bis 34 mm und 42°<br />
in den linearen/rotatorischen<br />
Achsen und 0,04 mm Aktorauf-<br />
70 4/<strong>2015</strong>