

Querschnitt 21 / Februar 2007 - h_da: Hochschule Darmstadt
Querschnitt 21 / Februar 2007 - h_da: Hochschule Darmstadt
Querschnitt 21 / Februar 2007 - h_da: Hochschule Darmstadt

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
<strong>Querschnitt</strong> <strong>21</strong><br />
ProgrAmmierung kooPerierender<br />
robotersysteme – kooPerierende<br />
robotersysteme stellen eine<br />
innoVAtiVe Fertigungstechnologie dAr,<br />
deren ProgrAmmierung zunehmend<br />
komPlexer wird.<br />
autor •<br />
Prof. Thomas Horsch<br />
Fachbereich informatik<br />
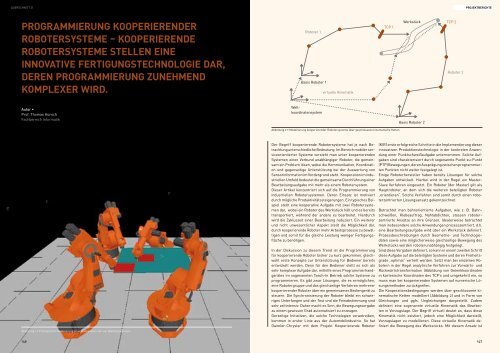
Abbildung 1 • Prototypische realisierung einer Kooperation von vier robotersystemen<br />
Der Begriff kooperierende robotersysteme hat je nach Betrachtung<br />
unterschiedliche Bedeutung. Im Bereich mobiler serviceorientierter<br />
Systeme versteht man unter kooperierenden<br />
Systemen einen Verbund unabhängiger roboter, die gemeinsam<br />
ein Problem lösen, wobei die Kommunikation, Koordination<br />
und gegenseitige unterstützung bei der Auswertung von<br />
Sensorinformation im Vordergrund steht. Kooperation im industriellen<br />
umfeld bedeutet die gemeinsame Durchführung einer<br />
Bearbeitungsaufgabe mit mehr als einem robotersystem.<br />
Dieser Artikel konzentriert sich auf die Programmierung von<br />
industriellen robotersystemen. Deren einsatz ist motiviert<br />
durch mögliche Produktivitätssteigerungen. ein typisches Beispiel<br />
stellt eine kooperative Aufgabe mit zwei robotersystemen<br />
<strong>da</strong>r, wobei ein roboter <strong>da</strong>s Werkstück hält und es bereits<br />
transportiert, während der andere es bearbeitet. Hierdurch<br />
wird die Zykluszeit einer Bearbeitung reduziert. ein weiterer<br />
und nicht unwesentlicher Aspekt stellt die Möglichkeit <strong>da</strong>r,<br />
durch kooperierende roboter mehr Arbeitsprozesse zu bewältigen<br />
und somit für die gleiche Leistung weniger Fertigungsfläche<br />
zu benötigen.<br />
In der Diskussion zu diesem Trend ist die Programmierung<br />
für kooperierende roboter bisher zu kurz gekommen, gleichwohl<br />
erste Konzepte zur unterstützung für Bediener bereits<br />
entwickelt werden. Denn für den Bediener stellt es sich als<br />
sehr komplexe Aufgabe <strong>da</strong>r, mithilfe eines Programmierhandgerätes<br />
im sogenannten Teach-In Betrieb solche Systeme zu<br />
programmieren. es gibt zwar Lösungen, die es ermöglichen,<br />
eine robotergruppe und <strong>da</strong>s gleichzeitige Verfahren mehrerer<br />
kooperierender roboter über ein gemeinsames Bediengerät zu<br />
steuern. Die Synchronisierung der roboter bleibt ein schwieriges<br />
unterfangen und der Test und die Feinabstimmung sind<br />
sehr zeitintensiv. Daher macht es Sinn, die Bewegungsvorgabe<br />
zu einem gewissen Grad automatisiert zu erzeugen.<br />
Derzeitige Initiativen, die solche Technologien vorantreiben,<br />
kommen in erster Linie aus der Automobilindustrie. So hat<br />
Daimler-Chrysler mit dem Projekt Kooperierende roboter<br />
(KIr) erste erfolgreiche Schritte in die Implementierung dieser<br />
innovativen Produktionstechnologie in der konkreten Anwendung<br />
einer Punktschweißaufgabe unternommen. Solche Aufgaben<br />
sind charakterisiert durch sogenannte Punkt-zu-Punkt<br />
(PTP) Bewegungen, deren Ausprägung zwischen programmierten<br />
Punkten nicht weiter festgelegt ist.<br />
einige roboterhersteller haben bereits Lösungen für solche<br />
Aufgaben entwickelt. Hierbei wird in der regel ein Master-<br />
Slave Verfahren eingesetzt. ein roboter (der Master) gilt als<br />
Hauptroboter, an dem sich die weiteren beteiligten roboter<br />
„orientieren“. Solche Verfahren sind somit durch einen roboterzentrierten<br />
Lösungsansatz gekennzeichnet.<br />
Betrachtet man bahnorientierte Aufgaben, wie z. B. Bahnschweißen,<br />
Klebeauftrag, Nahtabdichten, stossen roboterzentrierte<br />
Ansätze an ihre Grenzen. Idealerweise betrachtet<br />
man insbesondere solche Anwendungen prozesszentriert, d.h.<br />
eine Bearbeitungsaufgabe wird über ein Werkstück definiert.<br />
Prozessbeschreibungen durch Geometrie- und Technologie<strong>da</strong>ten<br />
sowie eine möglicherweise gleichzeitige Bewegung des<br />
Werkstücks werden roboterunabhängig festgelegt.<br />
Sind diese Vorgaben definiert, so kann in einem zweiten Schritt<br />
diese Aufgabe auf die beteiligten Systeme und deren Freiheitsgrade<br />
„optimal“ verteilt werden. Setzt man bei einzelnen robotern<br />
in der regel analytische Verfahren zur Vorwärts- und<br />
rückwärtstransformation (Abbildung von Gelenkkoordinaten<br />
in kartesische Koordinaten des TCP’s und umgekehrt) ein, so<br />
muss man bei kooperierenden Systemen auf numerische Lösungsmethoden<br />
zurückgreifen.<br />
Die Kooperationsbedingungen werden über geschlossene kinematische<br />
Ketten modelliert (Abbildung 2) und in Form von<br />
Gleichungen und ggfs. ungleichungen <strong>da</strong>rgestellt. Zudem<br />
definiert eine sogenannte virtuelle Kinematik <strong>da</strong>s Bearbeiten<br />
in Vorzugslage. Der Begriff virtuell deutet an, <strong>da</strong>ss diese<br />
Kinematik nicht existiert, jedoch eine Möglichkeit <strong>da</strong>rstellt,<br />
Vorzugslagen zu modellieren. Diese virtuelle Kinematik definiert<br />
die Bewegung des Werkstücks. Mit diesem Ansatz ist<br />
1 1 7<br />
Roboter 1<br />
Basis Roboter 1<br />
Weltkoordinatensystem<br />
virtuelle Kinematik<br />
TCP 1<br />
Abbildung 2 • Modellierung kooperierender robotersysteme über geschlossene kinematische Ketten<br />
Werkstück<br />
Basis Roboter 2<br />
TCP 2<br />
Roboter 2<br />
Projektberichte


